���̃y�[�W�̃X���b�h�ꗗ�i�S851�X���b�h�j![]()
| ���e�E�^�C�g�� | �i�C�X�N�`�R�~�� | �ԐM�� | �ŏI���e���� |
|---|---|---|---|
| 4 | 11 | 2016�N8��21�� 08:52 | |
| 22 | 11 | 2016�N8��11�� 19:42 | |
| 128 | 110 | 2016�N8��9�� 23:28 | |
| 15 | 20 | 2016�N8��9�� 08:15 | |
| 27 | 19 | 2016�N7��30�� 11:02 | |
| 18 | 26 | 2016�N7��23�� 20:26 |
- �u����̍i���݁v�̖��ԐM�A�������͍ŐV1�N�A�����ς݂͑S���Ԃ̃N�`�R�~��\�����Ă��܂�
 |
 |
|---|---|
�u�����̌��������ΐF�ɔ��˂��Ă��邠����ł� |
�c�������N�قǑO�ɒ����������Y�ŁA��{�I�ɁA�I�[�g�h���C�h���ɂ̒��ŕۊǂ��Ă���܂����A
����A���Ԃ��ł����̂Ńj�R��SC�Ŏ莝���̋@�ވ�ʂ茟�������Ƃ��낱�̃����Y�ɂ��Ăُ͈�Ȃ��Ƃ��ꂽ�̂ł����A���ƂȂ��C�ɂȂ��Ď����Ń����Y���݂Ă���ƃJ�r�̂悤�ȃV�~�����̓��ĕ��ɂ���Ă݂���̂ł��A�A
�c�����������Ƃ��ɂ͎����ł݂ĂȂ��̂Ŏ����̂Ƃ���ł����Ȃ����̂��Ƃ����Ƃ킩��܂���A
�������A�h���ɂ̎��x�v�͊�{�I��40���ȉ��ł����A�����̂Ƃ���ł����Ȃ����Ƃ͎v���܂���
����̂��̃����Y�͊u�����������ǂ��̂ł��傤���H
�����ԍ��F20129863�@�X�}�[�g�t�H���T�C�g����̏�������
![]() 0�_
0�_
�掿���������Č����Ȃ��Ȃ��Ă��܂��Ă܂���
���ۂ͔��˂��Ă��鏊�̈ꕔ�ɂ悭����t����H�t���N�^���ȃJ�r�̂悤�Ȗ͗l���A���˂��ア�̂������ۂ������яオ���Č����܂�
�����ԍ��F20129891�@�X�}�[�g�t�H���T�C�g����̏�������
![]() 0�_
0�_
�ǂ̕������悭�킩��܂��A���̒��x�̎ʐ^�����ł͔��f�ł��܂���ˁB
�J�r�����̐Ղ��ǂ����̔��f�́A�ێ���E�q�̗L���Ŕ��f���܂��B
���ꂪ���f�ł��邭�炢�Ɋg�債�Ă݂Ȃ��Ɖ��Ƃ��ł��B
�ٕ����̎悵�Ď��̌������ȂǂŊm�F����Ƃ����Ȃ��Ƃˁc
���[�J�[�Ō��������Ă���Ȃ�A���̌��ɑ��A�����Ă݂�悢���ƁB
���߂������̂��ǂ����킩��܂��A�ēx�����Ŋm�F���Ă���邩���ˁB
�����ԍ��F20129910
![]()
![]() 0�_
0�_
�J�r�ł��B�u�����܂��傤�B
�����ԍ��F20129939
![]() 0�_
0�_
��sk0107go����
����ɂ��́B
�ȂJ�r���ۂ��悤�ȋC�����܂��B
�䂪�Ƃ̌Â��������炩���̃����Y�ɂ������悤�Ȃ��̂��c
�_�X�Ƃ���܂��Ď��͊��S�u���͂��Ă܂��B
�����ԍ��F20129943�@�X�}�[�g�t�H���T�C�g����̏�������
![]() 0�_
0�_
 |
|---|
�ԐM���肪�Ƃ��������܂�
�摜���g���~���O���Ă݂܂���
�Ԋۂ��C�ɂȂ�Ƃ���ł�
�u���������˂��Ă���Ƃ���Ƀt���N�^���ȉA�̂悤�Ȃ��̂��ł��Ă��܂�
�����킩��₷���Ȃ��Ă���ƍK���ł�
��N�قǂق��̋@�ނƂƂ��ɓ���Ă��܂����̂łق��̂��̂��C������ł�
�o�����̂Ō䋳�����肢���܂�
�����ԍ��F20130012�@�X�}�[�g�t�H���T�C�g����̏�������
![]() 0�_
0�_
sk0107go����@������
���̃����Y�@�~���[�����Y�ł���ˁH
�~���[�����Y�̏ꍇ���̕����Ƀ����Y���͖̂����@���ɂ��锽�ˋ������Ȃ̂Ł@�J�r�ł���������Ƃ͂����蔻��C�����܂��B
���������ā@���̔��ˋ��̔��˂Ł@�J�r�̂悤�Ɍ����Ă���Ƃ������Ƃ͖����ł���ˁH
�����ԍ��F20130109
![]() 0�_
0�_
��okioma����
���~�X�^�[�H������
����819����
�����ƃ��{�}�� �Q����
�F�l�ԐM���肪�Ƃ��������܂�
Reflex Nikkor C 500mm�Ƃ��������Y�ŁA���炭�ꖇ�ڂ̕ی�K���X�H�̓����ɂ���悤�ł�
�����ԍ��F20130217�@�X�}�[�g�t�H���T�C�g����̏�������
![]() 0�_
0�_
�c�O�Ȃ��炱��́A
�
�ł��B
�����ԍ��F20130499
![]() 2�_
2�_
SC�ł͂Ȃɂ������Ȃ������̂ŁA�C�t���Ȃ������悤�ł�
�莝���̋@�ނ���C�Ɏ������݂������̂�������܂���
�Â��@�ނ̖����_���͋C�x�߂Ȃ̂ł��傤����
�����ԍ��F20130556�@�X�}�[�g�t�H���T�C�g����̏�������
![]() 0�_
0�_
sk0107go����@�ԐM���肪�Ƃ��������܂�
�����炭�ꖇ�ڂ̕ی�K���X�H�̓����ɂ���悤�ł�
���̈ʒu�̃J�r�ł�����ێ���������Ǝv���܂����@���̎ʐ^�ł͊m�F�ł��܂���̂Ł@�����Ț���@�R�[�e�B���O�̔�����̂悤�ȋC�����܂��B
�R�[�e�B���O�̔�����́@�o�N�ŋN���܂��̂Ł@���̃����Y�Ɉڂ邱�Ƃ͖����Ǝv���܂��B
�����ԍ��F20130586
![]()
![]() 2�_
2�_
�Ȃɂ��������ꗎ�����悤�ɂ������܂��ˁB
�ł��C�ɂȂ�悤�ł�����
�r�b���Q�����S����Ǝv���܂��B
�G�ɂ͉e������̂ł��傤���H
�����ԍ��F20131285
![]()
![]() 0�_
0�_
�{�̂�D750�Ŏ�ɓ����␅���ق�f�B�Y�j�[�̃V���[�A��`�̔�s�@�Ȃǂ��莝���B�e�ŎB��\��ł��B
Photohito�ȂǂŊm�F���܂������f�l��200-500mm�ł��Y��Ɏʂ��Ă����̂ł�����ł��ǂ����ȂƎv���܂����B
�������P�œ_�̕����Y��Ƃ������������̂Œl�i�������Ă��ŏ�����300mm�̒P�œ_�ɂ��悤���Ƃ��v���Ă��܂��B
��͂�x�e������v���̖ڂ��炷��ƃY�[���ƒP�œ_�ł͉_�D�̍�������̂ł��傤���H
�ǂ�����l�i�������̂łǂ��炩1�{�����Ƃ�����ǂ��炪�ǂ��ł��傤���H
���̂Ƃ���Y�[�������Y�����Y��ɎB���Ȃ�300mm�̒P�œ_�ɂ��悤���Ǝv���Ă��܂��B
��낵�����肢���܂��I
![]() 0�_
0�_
�_�D�̍��͂Ȃ��ł��傤�B������l�̊���������ł͂���܂����B�܂��A�킽�����v���ł��x�e�����ł��Ȃ��̂ŁB
�B�肽���ʐ^���B��郌���Y�i�œ_�����j������Ԃׂ��ł��B
�Ƃ���ŁA�f�B�Y�j�[�ł����́A��ʓI�ɂ͂ƂĂ��傫���Ǝv���郌���Y���������ނ��Ƃ́A���ʂȂ�ł��傤���H�@�Ƃ��ɂQ�O�O�|�T�O�O�����B
�O�r�͎g���Ȃ��͂��ł����B�莝���Ƃ͏����Ă���܂����B
�����ԍ��F20105600
![]()
![]() 2�_
2�_
http://kakaku.com/prdcompare/prdcompare.aspx?pd_cmpkey=K0000799664_K0000732506&pd_ctg=1050
���Ȃ炻�̓���AAF-S NIKKOR 300mm f/4E PF ED VR�ɂ��܂����E�E�E
�d�����œ_���������Ȃ�Ⴂ�܂��A�B�����莝���\�ȏd�ʂ��̊m�F�͏o���Ă���̂ł��傤���H
�V���[�Ȃǂ̈ړ�������B�e�̓Y�[�����֗��ł���ˁB
�����ԍ��F20105608
![]()
![]() 2�_
2�_
������
200�`�ɋ߂����̃����Y���������ł����H
����Ȃ��̂̓g���~���O�ł��܂��̂ŁA400mm���炢�̑���ɂ͂Ȃ��Ă��A500mm����Ƀg���~���O���Ă��c�ł��B
�܂�200mm�̑���ɂ͂Ȃ�Ȃ��̂ŁA�ق���70-200�Ƃ����������Ȃ�300mm�͂���ł��傤�B
(�t�ɔ��[�����c)
�����ԍ��F20105667
![]()
![]() 3�_
3�_
�f�B�Y�j�[�␅���ق̃V���[�Ȃǂł́A���{���̃l�I���R���f�W�����C���@�Ƃ���Ă��I�����̈�ɔ@���ł��傤�H
���Ă��A�f�B�Y�j�[�ɒ��]���������߂�̂ł����H
���݂܂���B�f�B�Y�j�[�ɋ������Ȃ����̂őf�p�ȋ^��ł��B
���ăC���J�V���[�́A�ϋq�Ȃɐ��˔���̂��T�[�r�X�̈�Ȃ̂ŁA�J�����A�����Y�̃J�b�p���K�{���ƁB
�����O�Ȃ�A�܂������H��FZ1000�͔@���ł��傤�H �ł����A���Ȃ�DL24-500�Ƃ��A���邢�́AFZ1000��p�@���o��̉\��������܂��B
http://cameota.com/panasonic/15069.html
���A�T���j�b�p��200-500������ɓ���Ă�����Ȃ�A�����炪�ǂ������B
�V�O�}150-600C�̗�ł����A�莝�͒Z������ŁA�펞�莝�͖����ł��ˁB
1�C���`�R���f�W�̊��Z���]���͌y���Ċy�ł���B
�����ԍ��F20105704�@�X�}�[�g�t�H���T�C�g����̏�������
![]() 3�_
3�_
>D750�Ŏ�ɓ����␅���ق�f�B�Y�j�[�̃V���[�A��`�̔�s�@�Ȃǂ��莝���B�e�ŎB��\��ł��B
300/4����{�����̂ł���A���Ȃ�200-500�����E�߂��܂��B
���̂��Ƃ����ƁA�ǂ����ɂ���x���ꑁ����70-200/2.8������Ȃ��Ⴂ���Ȃ�����ł�(��)
�{�f�B���c750�ł���A�����̈Â��ɂ͑Ή��ł��܂�����^^
�܂��A�����̎B�e�ɉ����Ă͍i���ĎB�鎖�������A�����̓t���T�C�Y�̂c750�Ȃ̂ō��{����200-500���ƁB
400/2.8�A500/4�A600/4�ȂǓ����\�肪�Ȃ��̂ł���A200-500�͔�у��m�B��ɂ͕K�����Ǝv���܂��B
�����ԍ��F20105828
![]() 4�_
4�_
����ɂ��́B
�����{�̂�D750�Ŏ�ɓ����␅���ق�f�B�Y�j�[�̃V���[�A��`�̔�s�@�Ȃǂ��莝���B�e�ŎB��\��ł��B
���ꂼ��̎B�e����ŁA�������ɂR�O�O�~���ŎB����\�}�����܂��Ă���̂ł�����A�P�œ_�̃L���̂���掿�łR�O�O�~���P�œ_�����Y�ł����Ǝv���܂����A��L�̎B�e�ꏊ�͍s���ꂽ���Ƃ��Ȃ��A�܂��z������Ă���\�}�����܂��Ă��Ȃ��̂ł�����A�@�����̂���Q�O�O�[�T�O�O�������Ǝv���܂��B
�����ԍ��F20105876
![]() 2�_
2�_
�������������ق��������̕����g�����肪�ǂ��悤�ȋC������B
http://sigma-photo.co.jp/lens/tele/50_500_45_63_os/
�����ԍ��F20106066
![]() 1�_
1�_
��amazon_love����
>> �{�̂�D750�Ŏ�ɓ����␅���ق�f�B�Y�j�[�̃V���[�A��`�̔�s�@�Ȃǂ��莝���B�e�ŎB��\��ł��B
�P�̃T�������ł��ƁA���ߑł��ɂȂ�̂ŁA�ꏊ�Ɋ���Ă͌������ꍇ�����邩�Ǝv���܂��B
����2�{�̒��ł́A200-500/5.6E�ɂȂ邩�Ǝv���܂��B
���̌��ȊO�ɁA70-300�̃Y�[�����ʓr�K�v���Ǝv���܂��B
(�܂��A���z�́A70-200/2.8���Ǝv���܂��B)
�r�͂Ɏ��g������Ƃ����ꍇ�A�V�O�}��120-300/2.8���g���Ղ����Ǝv���܂��B
�����ԍ��F20106223
![]() 1�_
1�_
����ɂ���
>�f�B�Y�j�[�����h�A�V�[�ւ̎������݁c
���̂Ƃ��됧���͂���܂���B
�L���m���̂��Ȃ�傫�Ȃ̂��������Ƃ�����܂��B
�܂��V�O�}�A�^��������150-600���悭�������܂��B
�����ԍ��F20106547
![]() 2�_
2�_
���͂���ł��悤�ˁB
�ł��A�_�D�̍����Ă��̕]�����̎ړx������܂����ˁB
��ςł�����ˁB
�������̂�]�����Ă�
�l�ɂ���Ă͍����Ȃ��Ɗ�������A
�傫�ȍ�������Ɗ�������c
���߂�͉̂掿�����ł����H
�����ʒu�̊W�ŁA
�����ꏊ�ł̎B�e���ł��Ȃ������ꍇ�A
���̎��X�̍\�}���p�Ŗ��Ȃ��ƍl���邩�ۂ��ōl�������ς���Ă��邩�ƁB
�Y�[�����ĕ֗������Y�ł�����ˁB
�����ԍ��F20106614
![]() 1�_
1�_
�F�l
�M�d�Ȃ��ӌ����肪�Ƃ��������܂����I
���̂Ƃ��뎝���Ă���̂͒��L�p�����Y��50mm�P�œ_�����Y�݂̂ł��̂�
200-500mm�̒��]�������Y�ɂ͂ƂĂ����͂������Ă��܂��B
�g������Ƃ��Ă͊F�l�̂��������ʂ�Y�[���̕����@�����ɂ��D��Ă���̂�
�g���₷�����Ǝv���܂����B
�����Ȃ�ɂ��̃����Y�ɂ��Ē��ׂĂ݂��Ƃ���
���{���Y�[���Ȃ�����500mm���͊Â��Ƃ����R�����g���������܂����B
�f�l�ڂ���قNjC�ɂ͂Ȃ�܂��c
����͉掿��D�悵�����̂�300mm�̒P�œ_�ɂ��邱�Ƃɂ��܂����B
����������Ȃ�����RAW�摜���g���~���O���ď����o���\��ł��B
�B�e�ɍs����1������������Ă��邱�Ƃ������̂�2kg�̃����Y�������Ǝ��������̂�
��������ǂ����ȂƎv���܂����B
�i�m�N����PF�̌��ʂɂ��Ă��C�ɂȂ�܂��B
�F�l�̂��ӌ��͍���̃����Y�I�тɂ��Q�l�ɂ����Ă��������܂��B
���肪�Ƃ��������܂����B
�����ԍ��F20107521
![]() 1�_
1�_
�ʑ���AF�̈ʑ������ĉ����w���Ă���̂ł��傤���H�ʑ��̍��Ƃ������ƂȂ̂ł��傤���A���̈ʑ��Ƃ����̂�������܂���B
���݂܂��ǂȂ�������������������ƍK���ł��B
![]() 2�_
2�_
���A�i�X�`�O�}�[�g����
�e���R����AF��Ǝ��₵�Ă��܂����A
�u�ʐ^�w�Z�v�ł��s���ꂽ��������Ǝv���܂��I�I
�����ԍ��F20056879
![]() 2�_
2�_
�A�i�X�`�O�}�[�g����@�@�������������܂��B�@�@google���܂����B
AF�����̈Ⴂ(�ʑ������o���ƃR���g���X�g���o���̈Ⴂ)
http://www.antaresdigicame.org/photo_gallery/camera/camera85.html
�ʑ���AF�̈ʑ������ĉ����w���Ă���̂ł��傤���H�@�@�i�@google�@�j
https://www.google.co.jp/search?sourceid=navclient&hl=ja&ie=UTF-8&rlz=1T4GUEA_jaJP611JP611&q=%e4%bd%8d%e7%9b%b8%e5%b7%aeAF%e3%81%ae%e4%bd%8d%e7%9b%b8%e5%b7%ae%e3%81%a3%e3%81%a6%e4%bd%95%e3%82%92%e6%8c%87%e3%81%97%e3%81%a6%e3%81%84%e3%82%8b%e3%81%ae%e3%81%a7%e3%81%97%e3%82%87%e3%81%86%e3%81%8b%ef%bc%9f
�����ԍ��F20056887
![]() 4�_
4�_
�A�i�X�`�O�}�[�g���� ����ɂ���
http://detail.chiebukuro.yahoo.co.jp/qa/question_detail/q1154382466
��̃T�C�g������Ɓ@�ʑ��́@������p�x�ɊW���錾�t�̂悤�ł����@���̈ʑ���AF�̐���������Ɓ@�����Ԋu�̋��������g���Ă���悤�ł��̂Ł@�ʑ��Ƃ������t���g���Ă���悤�Ɏv���܂��B
http://camera.itmedia.co.jp/dc/articles/1009/14/news026.html
�����ԍ��F20056991
![]() 1�_
1�_
�Ⴆ�X���傳���݉߂��Đ���������������璹���ɂȂ�
���H�̃Z���^�[���C���𒆐S�Ƃ���5�b�����ɉE�̑��a�A���̑��a��
�Ȃ��Ȃ��������Ƀt���t���ړ����Ă���Ƃ����Ƃ�
���̎��X�ŃX���傳��̂���ꏊ���u�ʑ��v�ɂȂ�܂�
5�b�O�ƌ��݂ł͈ʑ��������ɂȂ�܂���
���ꂪ����Έʑ������Ď��ɂȂ�Ǝv���܂�
�ʑ���AF�̓Z�p���[�^�ŕ�����������ɂȂ郉�C���Z���T�ł��ꂼ��ǂݎ��
�g�`�ɂ��āA���̔g�̃Y����ǂݎ��d�g�݂ł�
�s���g������Ă���Ίe�X�̃Z���T�����o����g�`�͈ʑ����Ⴂ�܂�����
���̈ʑ��������o����A�Ƃ����Ӗ��ł��傤
�Y���̕����őO�s����s�����킩��܂���
���p��������Ō��o�ł���Y���ʂ������܂�
F2.8�Ȃ�͂��ȃY�������o�ł��܂����A�傫�ȃY���͂킩��܂���
F5.6�Ȃ�傫�ȃY�������o���₷���ł����A�͂��ȃY���͂킩��܂���
��������
�{���グ��ƑS�̂������Ȃ�
�{��������ƌX�������Ȃ�
����Ȋ����H
����Ȃ��ł��傤��
�����ԍ��F20056998
![]() 13�_
13�_
�A�i�X�`�O�}�[�g����
�l�b�g�ŁA�����I
�����ԍ��F20057078�@�X�}�[�g�t�H���T�C�g����̏�������
![]() 0�_
0�_
 |
 |
|---|---|
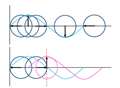
��i���A�u�ʑ��v�̃C���[�W�E�E�E���i���u�ʑ����v |
�ʑ����`�e�������̃C���[�W |
����ɂ��́�
�A�i�X�`�O�}�[�g����Ƀ��X�t����̕|���ȁ`�`�i�O�O�G�G�G�s��
���n�o�g�Ȃ�ŁE�E�E���w�E�����͐ԓ_�N�ƌ������ŁE�E�E�i��
�ȂE�E�E�ŋ߃A�n�g�E�A�n�g����̌�ǂ�����Ȃ�ł����ǁi�O�O�G�G�G�i�O�O�G�G�G�i�O�O�G�G�G�i��
�ʑ�������u�����g�v�̔g�̈ʒu�������ŁE�E�E���́A��̐}�̂悤�ɗ������Ă��܂��i�O�O�G�G�G�i�O�O�G�G�G�i�O�O�G�G�G
�܂��E�E�E�u���v�̐j�̈ʒu�i�p�x�H�H���W�A���H�H�j�v�ƌ������ł��B
���̎��v�̐j�̈ʒu�Y�����E�E�E�u�ʑ����v�ɂȂ�܂��B�B�B
�܂��E�E�E�J�����̃I�[�g�t�H�[�J�X�̏ꍇ�E�E�E��̓I�ɂ͌��̔g���Ď��ɂȂ�ł��傤���H�H
�ʑ����`�e�̌����́E�E�E
http://web.canon.jp/Camera-muse/tech/report/2011/09/
�����̃L���m������̃y�[�W��������₷���Ǝv���܂���
�l�I�ɂ́E�E�E�u�ʑ����v�ƌ������E�E�E�u�����v�ƍl���������A�I�[�g�t�H�[�J�X�̎d�g�݂͕�����₷���C�����܂��i�O�O�G�G�G
�J�����̃I�[�g�t�H�[�J�X���u�[�l�I�v�ɍl����Ȃ�H�H
�ڂ̑O�ɁE�E�E�l�����w��{���ĂāE�E�E���̎w��艓���߂�ƁB�B�B
�w��2�{�Ɍ����܂��ˁH�H�i�O�O�G�G�G�E�E�E���ꂪ�u�����v�ł��B
�\�R����E�E�E�ڂ̃s���g���w�Ɏ����Ă���ƁE�E�E1�{�ɏd�Ȃ�܂��B�B�B
���R���Ɠ��������s���Ă�ƌ������ŁB�B�B
����Ȋ����łǁ[�ł���H�H�i�O�O�G�G�G
�����ԍ��F20057163
![]() 5�_
5�_
�݂Ȃ��₢���肪�Ƃ��������܂��B
��������@������������
�����Ă�����ł����ˁH
���a�q�c����
�����N���肪�Ƃ��������܂��B
���݂܂������N�悩��͒m�肽�����Ƃ�������܂���ł����B
�����ƃ��{�}�� �Q����
�����N���肪�Ƃ��������܂��B
���݂܂������N�悩��͒m�肽�����Ƃ�������܂���ł����B
���A�n�g�E�A�n�g����
�ڂ����������肪�Ƃ��������܂��B
���C���Z���T�[�œ���ꂽ�g�`�̈ʒu��ʑ��A�Ƃ����F���ł�낵���ł��傤���B
������������������������
�������܂������킩��܂���ł����B
�����S�O�O�P����
�ڂ����������肪�Ƃ��������܂��B
�m�肽�������̂�AF�̌����ł͂Ȃ��A�Ȃ��ʑ��Ƃ���������ɂ������t���킴�킴�g���̂���m�肽�������̂ł��B
����Ԃ���点�Ă��݂܂���B
�����ԍ��F20057257
![]() 2�_
2�_
�A�i�X�`�O�}�[�g����
�����Ȃ�H�I
�����ԍ��F20057263�@�X�}�[�g�t�H���T�C�g����̏�������
![]() 0�_
0�_
�݂�Ȃ͂��炩���Ȃ��ł����Ƌ������
���̐��E�̈ʑ��Ƃ����T�O����������ł��܂��B
2�{�̃��C���b�b�c�̖��Õ��z���O���t�i���̔g�`�̂悤�Ȃ��́j�ƂƂ炦���
�����悤�Ȗ��Ãp�^�[��������͂��i������ʑ̂Ɍ����Ă���j��
���̃p�^�[���̒x��i�݁i���E�̃X�s�[�J�[�ȂǂŁj���ʑ����ƌĂт܂��B
���ۂɂ͎����ł͂Ȃ�
���C���b�b�c��̈ʒu�Ȃ̂�
���̐��E�̈ʑ��Ƃ����T�O�ŕ\������̂�
�ǂ����Ƃ��v���܂���
����ł��B
�i�����W�t�@�C���_�[���ʑ����l�e�Ƃ͌�������ȁj
�Q�̂b�b�c��̊��������Z���Đϕ������
�������O�s�����s��������
���̂܂܃��[�^�[�ւ̋쓮�d���Ƃ����
�T�[�{��H���\������܂��B
�����ԍ��F20057268
![]() 6�_
6�_
�̂���A���̗p��̎g�����͕s�K���Ǝv���Ă��܂��B
�����ԍ��F20057273
![]() 1�_
1�_
�����ł��ˁ@�������m�@���K����
���C���b�b�c��������@�Î~��ԂŃs������ʂ����߂��܂�����
�Z���b�b�c�ł͖�������A�Ȗ͗l����F���邱�Ƃ������ł��B
���̏ꍇ�A�����Ŕ����Ƀs���ʒu���J��o����
���m�덷���L���邩�A���܂邩���v�����邱�ƂƑg�ݍ��킳��܂��B
�����ԍ��F20057297
![]() 3�_
3�_
�w�ʑ���AF�x�́w�ʑ��x�Ƃ�AF�Z���T�i���C���Z���T�j��̋P�x���w���A�w�ʑ����x�͈��AF�Z���T��ł̋P�x���W�̑��ΓI�ȍ���
���w���܂��B
�Z���T��ł̋P�x�ω����g�̂悤�Ɍ�����̂Łw�ʑ��x�ƕt���Ă��܂����A���ۂ̌�(=�g�j�̈ʑ��̍��ł͂���܂���B
�����ԍ��F20057309
![]() 1�_
1�_
���Ђ�N�Ђ�N����
>���C���b�b�c��̈ʒu
���ꂪ�ʑ��Ƃ������ƂȂ̂ł��傤���B�����g�Ȃ̂ŁA����̈ʑ��Ȃ̂��Ɗ��Ⴂ���Ă����݂����ł��B
�������m�Z���T�[�A�Ȃ�C���[�W���₷���ł��B�����Ă�̂��ȁH
������ɐႪ�~��������
�Ȃ�ČĂ炢���ł����ˁB
�����ԍ��F20057312
![]() 0�_
0�_
����s�J�[�h����
���������肪�Ƃ��������܂��B����Ȃ�[�������������ł��B
�����ԍ��F20057333
![]() 0�_
0�_
�t��������Ȃ獑��I�ɂ́u�ʑ��v���ē���̗̈悾���Ŏg���錾�t�ł͂Ȃ�
���Ɣėp�I�Ȍ��t�ł�����A����Ȃɐ[���l���Ȃ��ł�����Ȃ��ł�����
�Ԃ����Ⴏ������
�u�e�X�̕ω��̂Ȃ��œ����]�������猩���Ƃ��̊e�X�̐��l�v
�݂����Ȃ���Ȃ�ł�����
�]�����͎��Ԃł������葽�ǂł�������
���l�͈ʒu�ł�������G�l���M�[�ʂł�������
�ʑ���AF�Ȃ瓯�������番������ăZ���T�œǂݎ��ꂽ�g�`�ł��傤��
�G���W���̃N�����N�Ȃ�N�����N������̃N�����N�s���ʒu
�Ȃ�Ȃ�
�S�F���Ə��F���̂Ȃ��Ń{�N�ƃA�i�^�̈ʑ�
�Ȃ�Ă킯�̂킩��Ȃ��������ł��邵�i�j
���ɂ��ʑ����Ďg�����t�͌��\����Ǝv���܂���
�ʑ��I�ɂ͖����Ɂu�ʑ����ĂȂ�v�Ƃ͌����Ȃ��Ǝv���܂���
�����ԍ��F20057435
![]() 4�_
4�_
�����Ԋu��
�����ԍ��F20057448�@�X�}�[�g�t�H���T�C�g����̏�������
![]() 1�_
1�_
���A�n�g�E�A�n�g����
�R�����g���肪�Ƃ��������܂��B
���܂����l����ȁA�Ƃ������Ƃł��ˁB�����ǂ����Ă��C�ɂȂ��Ă��܂����̂ŁE�E�E
���Ƃ��A
�ʑ���������Ă��遨�Q��AF���C���Z���T�[�̔g�`�̈ʒu�i�ʑ��j�����݂�����炸��Ă��遨�s���{�P���Ă���
�ʑ����������Ă��遨�Q��AF���C���Z���T�[�̔g�`�̈ʒu�i�ʑ��j�����݂���ƈ�v���Ă��遨�s���g�������Ă���B
�Ƃ����F���ł悢�ł����ˁB
�����ԍ��F20057575
![]() 0�_
0�_
�ĂсA����ɂ��́�
���͂́E�E�E����ς�i�O�O�G�G�G
>�ʑ���������Ă��遨�Q��AF���C���Z���T�[�̔g�`�̈ʒu�i�ʑ��j�����݂�����炸��Ă��遨�s���{�P���Ă���
>�ʑ����������Ă��遨�Q��AF���C���Z���T�[�̔g�`�̈ʒu�i�ʑ��j�����݂���ƈ�v���Ă��遨�s���g�������Ă���B
���͂��A���̔F���ŗǂ��Ǝv���܂��B
��قǂ̃��X�̃L���m������̃y�[�W�ɏ����Ă���}��������₷���Ǝv���܂���
���Ђ�N�Ђ�N����
�����A�ŏ��̓I�[�f�B�I�́u�ʑ��v���C���[�W������ł����ǁE�E�E�i�O�O�G�G�G
�J�����́u�ʑ��v�ɂ́A�h�[���Ă��u���Ԏ��v���C���[�W�ł��Ȃ����������ŁE�E�E�Y�����h�[�������Ă悢���H�H�i�O�O�G�G�G
�Ȃ̂ŁE�E�E�L���m������̃y�[�W���킩��₷�����ȁH�H�E�E�E�ƁH�H�i�O�O�G�G�G�i�ꉞ�u�g�`�v�ŕ`���Ă��邵��j
�����ԍ��F20057619
![]() 1�_
1�_
�����S�O�O�P����
�������J�ȉ�����肪�Ƃ��������܂��B
�L���m������̃y�[�W�͎Q�l�ɂ����Ă��������܂����B
�F���͂����Ă�ŗǂ��̂ł��ˁB���肪�Ƃ��������܂��B
�ʑ���AF���Ė��O�͕�����ɂ����ł��ˁB�ł�����AF�ł��ȂႤ�C�����܂����E�E�E����ς�ʑ����Ƃ������t�ɂȂ��Ă��܂���ł����ˁB
�����ԍ��F20057700
![]() 0�_
0�_
���A�i�X�`�O�}�[�g����
>> �ʑ���AF���Ė��O�͕�����ɂ����ł��ˁB
>> �ł�����AF�ł��ȂႤ�C�����܂����E�E�E����ς�ʑ����Ƃ������t�ɂȂ��Ă��܂���ł����ˁB
�J�����ꂽ���ɕ����Č���̂����肾�Ǝv���܂��B
�܂��́A�Ŋ��̐}���قŒ��ׂČ���̂����肾�Ǝv���܂��B
�����ԍ��F20057731
![]() 0�_
0�_
�u��ȏ�̑��݂����ʂ̕]�����ɂ����đ��ւŎ�����鎖���v�̕��������̂���
�w�ʑ��x���Č��t�͕����w�ł̂ݎg���ׂ��A�Ȃ�Ė@������킯����Ȃ���
�ʑ���AF�ŕʂɈ�a���͂Ȃ��Ǝv�����ǂȂ�
���܂������Ă��Ȃ��ł�����
�p��ł�"phase difference detection autofocus"�ł�����
�u�ʑ������oAF�v�A���̂܂�܂ł���
�������Ă��Z���T�͎��o�I�ɂ��̂����Ă�킯����Ȃ��ł�����
�ނ���{�����牓�������Ă��܂��C�����܂��O�O�G
�t��MF�J�����̃X�v���b�g�v���Y�����Y�o�������F���ł͂Ȃ��ł��傤��
>�ʑ���������Ă��遨
>�ʑ����������Ă��遨
�����͐������Ǝv���܂����A�����Č��t�K���Ƃ��
�����̂́u�ʑ��v�ł����āu�ʑ����v�̓Y���̗ʂł�
���ɑɂȂ�ʑ����Z���T���e�XA��B�ɂ����
A��B�̔g�`������Ă��遁�ʑ��������遁�s���g������Ă���
A��B�̔g�`����v���Ă��遁�ʑ������Ȃ��E���ʑ��i�����j���s���g�������Ă���
�ɂȂ邩�Ǝv���܂�
�����ԍ��F20057770
![]() 2�_
2�_
��������@������������
�Z�p�҂̕��Ƙb���ł���Έ�ԂȂ̂ł����E�E�E���������������Ă����ł����ˁB
���A�n�g�E�A�n�g����
�ڂ���������肪�Ƃ��������܂��B
����܂ł̊F����̃R�����g����A�Ȃ��ʑ���AF�ƌĂ��̂��͗����ł��܂����i�̂���ł��j
���C���Z���T�[�̔g�`��g�Ƒ����āi�g�`�ł�����g�œ�����O�Ȃ̂ł����j�A���̔g�`�̂��Ƃ��ʑ��ƌĂ�ł���ƁB
�ʑ���AF�͈ʑ��̍����i�ʑ����j���v�Z���ăs���g�����킹��A�Ƃ������Ƃł��ˁB
�����ԍ��F20057797
![]() 0�_
0�_
���A�i�X�`�O�}�[�g����
���Ȃ�ČĂ炢���ł����ˁB
���̍ہA���債����ǂ��ł��傤�H
�����ԍ��F20057829
![]() 1�_
1�_
������ɐႪ�~��������
�ʔ����ł��ˁB�ł����ꂾ�����t�����y���Ă��܂��Ƃ���������������܂���ˁB
�����ԍ��F20057846
![]() 1�_
1�_
���ʑ���AF�͈ʑ��̍����i�ʑ����j���v�Z���ăs���g�����킹��A�Ƃ������Ƃł��ˁB
�@���j�R���̋Z�p�҂��������{�ɂ��ƁB�ʑ���AF�̌����Ƃ́A�����Y�̉E�[��������Ă���R���g���X�g�����ʂ̒����ɂ�����ŁA�����ɂ���ƌ�s���A�E���ɂ���ƑO�s���ƂȂ�̂������ł��B
�@���E�܂��͏㉺��Z�b�g����̂̓s���g�̍������ʒu���m�F���邽�߂Ə�����Ă��܂����A�z�����t���܂���ł����B�m���ɃL���m���̐����}�ł��Е������łł��@�\����悤�Ɍ����܂��B
�@���ۂɃ����Y�̒[��������Ă���R���g���X�g����肷��̂̓Z�p���[�g�����Y�ƌ������ƂɂȂ�̂ł��ˁB
�@���̌����̂��߁A�ʑ���AF�̓����Y�̋��ʎ����̉e�����邻���ł��B�����Ǝ��ӂ̃s���g�ʒu���قȂ郌���Y��f5.6�p��f2.8�p�̈ʑ���AF�̃s���g�̈ʒu���Ⴄ�Ȃ�Ă��Ƃ���������̂ł��ˁB
�@���̋��ʎ����ɂ��s���g���́A�����Y�ɔ�����ꂽ�������[�ɋL�^����A�����Y�̋쓮���ɁA���̕����I�t�Z�b�g���č��킹�邱�ƂɂȂ�܂��B
�@�L���m���̑����S���҂ɖ₤������ł́A��g���闝�R������ł��܂���ł����B�܂��A�m��Ȃ���Ύʐ^���B��Ȃ��킯�ł͂���܂���A�����́A�����܂łɂȂ��Ă��܂����B
�����ԍ��F20057882
![]() 1�_
1�_
���̂悤�Ƀe�C���W�J�ł��Ȃ����̂�
�ʑ������͎g�������Ȃ�����
���C��CCD�̓R�s�[�@�̃Z���T�̂悤��
�ꎟ���Ō��Ă��܂��B
�V�}�͗l�ł���
�����ԍ��F20057982
![]() 1�_
1�_
�p���"phase"��"�ʑ�"�ƖĂ��܂����̂�
�����Ȃ�����ł��傤�ˁB
>phase
>1)�u�ʑ��v�K���I�ɐ������J��Ԃ���錻��(�����I�ȗ�)�̂���C�ӂ̋N�_�ɑ��鑊�ΓI�Ȉʒu.
>�����I�ȓd�C�M����,�ʏ�,1������360�x�Ƃ��ĕ\������̂�,���̒[��,�Ⴆ�Δ������̈ʑ��̂����
>�ʑ���180�x���ꂽ�Ƃ����\��������. 2)�u�i�K�v���錻�ۂ̃��C�t�T�C�N���ɂ�����,
>���Ƃ͋�ʂ���镔���̌o���I�Ȓi�K.
�t�F�[�Y�E�R���g���X�g�A���̂܂܂ł��ǂ������悤�ȋC�����܂��B
�����ԍ��F20058030
![]() 3�_
3�_
���f���[�U����
�ڍׂȉ�����肪�Ƃ��������܂��B
���Ђ�N�Ђ�N����
�e�[���[�W�J�A�������W����̂ł��傤���B
��������man����
�t�F�[�Y�����킹��A�Ƃ��������������܂���ˁB
�m���Ɉʑ��Ƃ������t�F�[�Y�̂܂܂̕����C���[�W���₷�����������܂��B
�����ԍ��F20058691
![]() 0�_
0�_
�ʑ��͈ʒu�ǂ��납�A�������ł��Ȃ�
�J�N�\�N�h���ł�����
�������������M���ł��邱�Ƃ�ۏ���Ă��Ȃ�
�e���M���ɂ�����Ă�
�����ԍ��F20058926
![]() 1�_
1�_
���Ђ�N�Ђ�N����
��E�E�E�E�Ȃ�����Ȃ��Ă��܂����B
���̃C���[�W�́A�Q�̃��C���Z���T�[�Ŕg�`�������ňʒu���قȂ�g�`A,A'���������Ƃ��A����2�̔g�`�̈ʒu�̍����ʑ������Ɨ������Ă����̂ł����A�ǂ��ł��傤���B
�����ԍ��F20058984
![]() 0�_
0�_
�����ł́@�Q�o�H�̓`�B�������
�����Ɠ����i�O�x�j�œ`����Ă��邩�t���i�P�W�O�x�j�ɂȂ��Ă��Ȃ��������߂��܂��B
�i�E�X�s�[�J�[�ƍ��X�s�[�J�[���t�����ƋC���������j
�ł��`�B�o�H�͊����ł͂Ȃ��̂�
�}�C�i�X���x�Ƃ��}�C�i�X���x�ɂȂ邱�Ƃ�������
���̔��������ʑ��ł�
�@�@�G�t�F�N�^�ς݉����ƌ������������肷��Ƃ���
�@�@�G�t�F�N�g�����ǂꂾ���ʑ��������Ă��邩����莋�����
�ʑ��̒����̓f���C�i�x���j�������čs���܂���
���̒x���ʂ͐�Ύ��Ԃ�
���́@�ʑ��@���@�x�����ԁ@÷�@�������� �ƂȂ�܂��B
�ł��������g���i�Ƃ��{�������j�͈��Ƃ����O��
AF�Z���T�ɓ��˂���Ȗ͗l��AF�Z���T���O�ꂽ���ʂł�
�������ŌJ��Ԃ��Ă���ۏ�͂���܂���B
�����Y�̃R���g���X�g�Č��]��
�i�e�X�g�p�^�[���`���[�g�j�ɂ�����
MTF��Ԏ��g���ő���]������Ă܂���
���Ⴀ�A�Ȗ͗l���̌덷�������ďd�������Ă�
���̈Ӗ��������Ȃ��ǂ��납
AF�Z���T�[�ł͌�F���Ƃ��ĕ]������܂��B
�����ԍ��F20059340
![]() 1�_
1�_
���킵����������u�ʑ����v�����肩������܂���B�������A�J�����͌��w�@��ł��B�u�ʑ��v�u�ʑ����v�Ƃ����Ɓu���g�̈ʑ��v�u���g�̈ʑ����v���܂��C���[�W����̂��펯�I�Ȑl�Ԃ̊��o�ł��傤�B���������Ȃ̂ł��B���Ƃ������͂��ɂ��Ă��A�펯�I�Ȑl�Ԃ̌����U������悤�Ȗ��O�͖]�܂�������܂���B
��������Ȃ����������t����ׂŁA�������肪�������̂ł���悤�Ɏv�킹����A�����Ђ��ɂ��đ�������Ɋ������肷��̂��A�킽���͑匙���ł��i���܂ɁA�G�ΊW�ɂ���l�Ԃɂ͎g���܂���ww�j�B���́u�ʑ����v���g���o�����o�܂ɂ��A���������悤�ȍ��_���������悤�Ɏv���ĂȂ�܂���B
�����ԍ��F20059697
![]() 1�_
1�_
���{��ɖ������t�����̂܂܃J�^�J�i�ŊO����Ƃ��Ďg���̂́A
���{��̑傫�ȃ����b�g���Ǝv���܂����ǂˁB
��肭���Ȃ炻�̕����ǂ��ł�����ǁA
�J��������Y�Ȃ�Ă��̂܂g���Ă��܂���ˁB
"�ʑ�" "�ʑ���" �Ȃ�Ĉ�ʐl�������b�ŕ��ʂɎg�����t����Ȃ����낤���A
������l����A����"�ʑ�"�ŏ\���Ȃ̂ł��傤�B
���������ƕp�ɂɎg���悤�ɂȂ�Ȃ�A����ɖ߂邩
�����ƓK�Ȍ��t���o�Ă���悤�ȁA����ȋC�����܂��ˁB
�Ђ�N�Ђ�N����
���j�A�t�F�[�Y�X�s�[�J�[�̎��オ���������ł��ˁB
�E�[�n�[�E�X�R�[�J�[�̃Z���^�[�R�[���i�Z���^�[�h�[���H�j�̈ʒu���g�B�[�C�^�[
�ɍ��킹�Ă��A�E�[�n�[�U���̑啔���͂�������Ȃ��E�E�E�Ƃ�
�U�X�Y�o��������܂��B
�����ԍ��F20059740
![]() 2�_
2�_
���Ђ�N�Ђ�N����
���J�Ȃ��������肪�Ƃ��������܂��B�I�[�f�B�I�ɏڂ����Ȃ��̂Ńs���Ƃ��Ȃ��̂ł����A�肽�����Ƃ͂Ȃ�ƂȂ��`����Ă��܂����B
����AF�Z���T�[�Ō��Ă���͎̂����ł���A�����ɂ͌��̈ʑ����͎����Ă���i�͂��j�Ǝv���̂ŁA�ʑ����Ƃ������t���̂ɂ͂���R������܂��B���͂�ǂ��ł������Ƃ������������Ă��܂������i�j
������ɐႪ�~��������
�܂�����Ȃ��Ƃ�������炸�ɁB
��������man����
���Ƃ��Ƃ̓n�l�E�F���̓����ł�����p��̂͂��ł���ˁB�����ɂȂ�ď����Ă������̂��m�肽���Ƃ���ł��B
�����ԍ��F20059795
![]() 0�_
0�_
> ���Ƃ��Ƃ̓n�l�E�F���̓����ł�����p��̂͂��ł���ˁB�����ɂȂ�ď����Ă������̂��m�肽���Ƃ���ł��B
phase detection��phase matching�̂ǂ��炩�ł��傤�ˁB
LensRentals.com - How Autofocus (Often) Works
https://www.lensrentals.com/blog/2010/07/how-autofocus-often-works/
> The basic design of phase detection (AKA phase matching) autofocus was originated by Honeywell in the 1970,
�ʑ���AF�͌����Ƃ��Ă͒P���ł����A��������d�g�݂��悭�l���o�����ȂƎv���܂��B
�����ԍ��F20060083
![]()
![]() 1�_
1�_
�����Ƃ��Ƃ̓n�l�E�F���̓����ł�����
�@������������Ă���킯�ł͂���܂��A�n�l�E�F����TCL�ƃ~�m���^�i�ׂɂ��āA���q�֕v�̋L�����ڂ����ł���(�u����̃J�����ƃ����Y�Z�p�v�ʐ^�H�Əo�Ŏ�)�B
�@TCL�́A�㉺�̌����̃s���g�������Ɠ���ւ�邱�Ƃ����o���đ������s�����̂炵��(���M�����͌��J����Ă��炸�A�T���v�������ĊȒP�Ȏ�������肷��ɂ�85,000�h���������K�v�Ȃ̂őz�����Ă���)�ƕ��͂��Ă��܂��B
�@���̂Ƃ��A�������Ă���㉺��CCD�̏o�͂��s���g�������Əo�͓d�͂̈ʑ����Y����Ə����Ă���܂��B���̕ӂ��ʑ����̌ꌹ�ł��傤�B
�@�B���ʐ^�ɍv�����Ȃ��̂ŁA�ڂ����͌��Ă���܂���B�ڂ����m�肽����A�Ö{���ɂ��邩���m��܂���̂ŒT���Ă݂Ă͂ǂ��ł��傤�B
�@�Ȃ��A�~�m���^�A�n�l�E�F���i�ׂŃ��C�J���������̗L�������~�m���^�̔s���ƂȂ����Ə�����Ă��܂��B���C�J���������܂�Ă����悤�ł��ˁB
�@
�����ԍ��F20060143
![]()
![]() 2�_
2�_
������݂�����
���f���[�U����
���肪�Ƃ��������܂����B�悤�₭�����ł����悤�ȋC�����܂��B
> The basic design of phase detection (AKA phase matching) autofocus was originated by Honeywell in the 1970,
>�������Ă���㉺��CCD�̏o�͂��s���g�������Əo�͓d�͂̈ʑ����Y����Ə����Ă���܂��B
�܂胉�C��CCD����̐M�����I�V���X�R�[�v�̂悤�ȋ@�B�Ō��Ă݂�ƁA�s���g�����炵���Ƃ��ɔg�`�����E�ɂ����l�q���A���Ƃ��T�C���g�̈ʑ������ꂽ�悤�ȋ����ƈꏏ�Ȃ̂ŁA�ʑ��ƌĂ�ł���Ɨ������܂����B
�@�\�̓V���v���H�ł����A������J�����ɑg�ݍ��ނ̂͑�ς������낤�Ǝv���܂��B
�������ʑ�(phase)�������Ă���Ƃ��낪�|�C���g�Ȃ킯�ł��ˁB
�悭�킩��܂����B�݂Ȃ��肪�Ƃ��������܂����B
�����ԍ��F20060604
![]() 0�_
0�_
�A�i�X�`�O�}�[�g����
���������b�ɂȂ��Ă��܂��B
���́A�ʑ���AF�ƌĂԂ��Ɋւ��ẮA(1)�̃u���O��ǂނƖŒ��ꒃ�X�b�L������Ǝv���܂��B
�ʑ���AF�̃��C���Z���T�[����̏o�͂́A(2)�̐}�̒ʂ肾�Ǝv���܂����A�w�ǂ̕��͂��̐}�̂悤�ȃC���[�W��������Ă���Ǝv���܂��B�������A(1)�ł̓��C���Z���T�[����̏o�͂́A�G�b�W�����o����ׂ́u�P�x�̔����v�Ɛ������Ă��܂��B��������Ă��鏊���~�\�ł��B�����Đ}6�ɂāu�Q�̑��̃G�b�W�ʒu�̍����ʑ��������o���Ă��邱�Ƃ���A�u�ʑ����`�e�v�̌Ăі�������̂��Ǝv���܂��B�v�ƃR�����g�Ȃ����Ă��܂��B
�}6�̔����M���͔g�̂悤�Ɍ����܂�����A�G�b�W�������̃s�[�N�͂���ʑ��Ɉʒu���A2�̃��C���Z���T�[���瓾����A2�̃G�b�W(�������̃s�[�N�͂���ʑ�)�̍����A�ʑ����ƌĂԂ̂́A���R�Ȏ��Ɏv���܂��B
(1) �ʑ����`�e�̃G�b�W���o�A�Z���T�[���Q�P�g�̗��R
http://lglink.blog81.fc2.com/blog-entry-1034.html
(2) �L���m���̉��
http://web.canon.jp/Camera-muse/tech/report/2011/09/
�y�֑��z
�ȑO�A�f�p�ȋ^���������������܂��B�������ǂ��������Ă��Ȃ��������A���Ԃ��o���Ă��܂����̂ʼnv�X������Ȃ��Ȃ��Ă��܂��B
�Ȃ��A�ȉ��̃X���ł͓r���܂ŁA���f���c�B����̃v���t�B�[����S�������グ���A��ώ���ȃR�����g�����Ă��܂��܂����B��������������肽���C���͖����ɕς��܂���B
�E���������_�̂݊J��F8�Ή��̎d�g�݂������ĉ�����
http://bbs.kakaku.com/bbs/K0000347675/SortID=17229252/
�����ԍ��F20060659
![]() 1�_
1�_
���A���߂�
���̓����W���̂���Ȃ�
�܂����C��CCD�Ȃ�č��l�̉�
�������~���[����]������SPD�i�P�̌��f�q�j�ɓ����Ă����͂�
��������Ǝ��Ԃ̊��ɂȂ邵�A�I�V���Ŋϑ������ɂ��Ȃ��Ă�
�Q�~���[�A�QSPD�Ȃ�Q���ۊϑ��ɂȂ邵
�ʑ��Ƃ����������K���ۂ��͓���Ƃ���ł���
�x�����Ԃ����߂�Ƃ������Ƃł��̂�
���ƎғI�ɂ͐�����������ł��傤��
�����ԍ��F20060958
![]() 1�_
1�_
�A�i�X�`�O�}�[�g����
�ʑ��Ɋւ���ꊴ��������ƍl���Ă݂܂����B�ꊴ�Ȃ̂ŁA�����I�ȈӖ��Ƃ͈قȂ�܂����A���e�͉������B
�܂��A�p�ꂾ�ƁAAF�����Ƃ��Ă�phase detection��p���܂��B
�EPhase detection(Autofocus)
https://en.wikipedia.org/wiki/Autofocus#Phase_detection
����A�����g�ł́uIn sinusoidal functions or in waves "phase" has two different, but closely related, meanings. One is the initial angle of a sinusoidal function at its origin and is sometimes called phase offset or phase difference. Another usage is the fraction of the wave cycle that has elapsed relative to the origin.�v�ƒf������ŁA
�uPhase difference is the difference, expressed in degrees or time, between two waves having the same frequency and referenced to the same point in time.�v
�Ƃ��Ă��܂��B
�EPhase difference(Phase(waves))�@���@�����N�����ځA�\��Ȃ��̂ŁA�uPhase (waves)�v���uPhase_difference�v�ƑI��ʼn������B
https://en.wikipedia.org/wiki/Phase
�����g�̏ꍇ�́A�����m�̂悤�ɁA�I�C���[�̌�����p����ƁA�ʑ����͋����ɂȂ�܂����O�p���łȂ��w�����ň�����悤�ɂȂ�܂��B�����Ȃ�ƁA�l�ɂ��ł��傤���A�d�v�Ȃ̂͋����Ȃ̂ŁA�g����ʑ����������o���Ĉ����Ă���悤�Ȋ��o�ɂȂ�܂��B
�E���f���ɂ��\��(�ʑ�)
https://ja.wikipedia.org/wiki/%E4%BD%8D%E7%9B%B8#.E8.A4.87.E7.B4.A0.E6.95.B0.E3.81.AB.E3.82.88.E3.82.8B.E8.A1.A8.E7.8F.BE
���B�̐g�߂ȏ��ł́A�ʑ��͗ǂ��g����p��ł��B�Ⴆ�A��/4�A��/2���B�����Œ��ӂ������̂��A���R���́A�g���A�ʑ��A���x�����l�X�Ȑ����g�̏W���ł��鎖�ł��B��/4�A��/2���́A�ܘ_�A�ɂ𒆐S�g���Ƃ��Đv����Ă���͂��ł����A�~�Ό��t�B���^�[���w��������g�p����ہA���S�g���ɂ̎��͈ӎ����Ă��Ȃ��Ǝv���܂��B�t�ɁA�J�����p�����Y��K�l�p�����Y�̔��˖h�~���̖�����4/(�ɁEn)�ł��B1�w�R�[�g�ł�1�̃ɋߖT�ł������˖h�~���ʂ��Ȃ��̂ŁA�R�[�g�𑽑w�����鎖�ɂ�蕝�L���g���Ŕ��˖h�~���ʂ�������悤�ɐv����Ă��܂��B
�E���˖h�~�w�̐v
http://kinoufilm.nof.co.jp/articles/article3-2.html
�ȏ�Ō��ė����悤�ɁA�ʑ����l����ꍇ�A���X�̐����g�𗣂�A�ʑ������ōl����ꍇ�����Ȃ�����܂���B�܂��A���̐��ɑ��݂���g�ɂ́A���Ԏ��̔g�����łȂ���Ԏ��̔g������܂����A����Ƀt�[���G�����W�J���v�������ׂ�A���̐��ɑ��݂���g�̈ʑ������ɒ��ڂ��A�ʑ��������o���čl����ƁA����܂ł̗l�X�Ȓm������������悤�Ɏv���܂��B�����Ē��ӂ������̂́A�ʑ����d�v�Ȃ̂ł͂Ȃ��A�ʑ������d�v�ƌ����_�ł��B
�ƌ������ŁA�ʑ���AF�Łu�ʑ��v�ƌ����p����g�p����̂�OK�Ǝv���܂����Adetection��difference�ɒu����������Ƃ��Ă��A�ʑ���AF�ƌ����Z�p�ɑ���C���[�W���ϗe�������Ȃ��悤�Ɏv���܂��B
�����ԍ��F20061315
![]() 1�_
1�_
���~�X�^�[�E�X�R�b�v����
���J�ȉ�����肪�Ƃ��������܂��B
���ɂ͂���Ȓ����������\�͂�����܂���̂ŁA�ȒP�Ȃ��Ԏ��ł������������B
�Z���T�[���Q���闝�R�ł����A�������̃T�C�g�Ő�������Ă��闝�R����Ȃ����Ǝv���̂ł����A�ǂ��ł��傤���B
http://www.photosepia.jp/focussing_tech.html
�ʑ��ɑ���C���[�W�ɂ��Ă����肪�Ƃ��������܂��B���̓��̗������ǂ����Ȃ��̂ŁA������萮�����ēǂ܂��Ă��������܂��B
�d�ˏd�˂��肪�Ƃ��������܂��B
�����ԍ��F20061629
![]() 1�_
1�_
���Ђ�N�Ђ�N����
���̂���̓��C��CCD�͂Ȃ�������ł��ˁB
��������Ȃ���ł����A�Z���T�[�͂P�ł��ʑ������o�͂ł�����Ȃ��ł��傤���B
�����I�ɂ͂P�ł������悤�ȋC�����Ă���̂ŁB�i���p�I�ɂ͂Q�K�v�j
�����ԍ��F20061655
![]() 0�_
0�_
�A�i�X�`�O�}�[�g����
���X�A���肪�Ƃ��������܂��B
> �Z���T�[���Q���闝�R�ł����A�������̃T�C�g�Ő�������Ă��闝�R����Ȃ����Ǝv���̂ł����A�ǂ��ł��傤���B
�A�i�X�`�O�}�[�g�����p�Ȃ����Ă���L���̕����P�������ł��ˁI�������p�����u���O�L���ł́A��ʑ̂��_����ʂɕς�������ɁA���ւ̈ړ��������ɐ����Ă���̂ŁA�u���O�������ꂽ���́A���������������Ȃ������A�������Ĉ��������̂ǂ��炩�̂悤�Ɏv���܂��B�����A�u���O�L���̋L�q���̂��̂͊Ԉ���Ă��Ȃ��̂ŁA���Q�l�ɂ͂Ȃ�Ǝv���܂��B
�ȉ��́A�������̃u���O�̑����ŁA�N���X�Z���T�[�̕K�v�����̌������s���Ă��܂��B���Q�l�܂ŁB
�E�s���g������Ȃ��E�x���E�s���m�`���t�A�ʑ����`�e�̖��_
http://lglink.blog81.fc2.com/blog-entry-1040.html
�����ԍ��F20061735
![]() 1�_
1�_
���A�i�X�`�O�}�[�g����
> �Z���T�[���Q���闝�R�ł����A�������̃T�C�g�Ő�������Ă��闝�R����Ȃ����Ǝv���̂ł����A�ǂ��ł��傤���B
> http://www.photosepia.jp/focussing_tech.html
��L�̃T�C�g�Ő�������Ă���J������2��g���t�H�[�J�X���@�́A�����W�t�@�C���_�[�Ŏg���Ă�����@�ł��B
�������Ⴂ�܂��̂ŁA������ʑ���AF�̐����ɗp����͕̂s�K���낤�Ǝv���܂��B
�����ԍ��F20061889
![]() 1�_
1�_
�A�i�X�`�O�}�[�g����
[20061315]�̒����ł��B�h�����p������������ł��I�I
�y��z�I�C���[�̌�����p����ƁA�ʑ����͋����ɂȂ�܂�
�y���z�I�C���[�̌�����p����ƁA�U���A�ʑ��́A�����Ƌ����Ƃ��狁�߂��܂��B
(�⑫) �O�p�����w�����̕������ϕ����ň����₷���̂ŁA�����g���w�����ň����A�U���ƈʑ����K�v�ȏꍇ�́A�ȉ��ɂ�苁�߂��܂��B
�EF(��) �̑傫���ƈʑ��ɂ���
http://okawa-denshi.jp/techdoc/2-2-8Fwtoisou.htm
�ʑ���AF��(���C��)�Z���T�[��2�K�v�ȗ��R�ł����A����݂������w�E�̂悤�ɃA�i�X�`�O�}�[�g�����p�Ȃ������L���͕s�K�ł����B�\����܂���B
������x�A�ȉ��̃u���O�L���������������B��ʑ̂�_(���͕�����Ղ��A�_�����Ƃ��܂�)�Ƃ����ꍇ�̐}2�`4�����Ē����ƕ�����܂����A���ł̏ꍇ�́A��ʑ̂̈ʒu�Ɉ˂炸�A�_�����ɂ��P�_��a0�Ɉʒu���܂��B���ׁ̈A�}2�`4�ɂ����ẮA�Z���T�[��1�ŏ\���ł��B����ɑ��A�A�i�X�`�O�}�[�g�����p�Ȃ������L���ł́A��ʑ̂̈ʒu�Ɉ˂�A���ł̏ꍇ�̋P�_���Y���܂��B�]���āA��������1�̃Z���T�[�ł͑����͖����ŁA2�g�ݍ��킹�ĎO�p���ʂ̌����ɂđ������鎖�ɂȂ�܂��B
���́A�_�������}2�`4�̏㉺�ɃY�������ł��B���̎��́A���ł̏ꍇ�A�_�����ɂ��P�_�͐}5�̉��ɑ�������͂��Ȃ̂ŁA���ł̈ʒu�́Aa0����e0�����Y���܂��B�������A�}6�̉��ɂ��鎮1�Ǝ�2�̂悤�Ɉ����Ae0�������o���܂��B�܂�Ae0����������ׁA2�̃��C���Z���T�[���K�v�ƂȂ�܂��B
�����A���̐�����������Ɖ����āA�ʑ���AF�̏ꍇ�A�����_�����܂��Ă��܂���ˁB�]���āA�_�������}2�`4�̏㉺�ɃY�������́A�����̑����_����O��A�}5�̉��ɑΉ����鑪���_�A�܂�ʂ̃��C���Z���T�[�ő��肷��A���ł͕K�����̃��C���Z���T�[��a0�Ɉʒu����͂��ł��B�Ȃ̂ŁA�_�������}2�`4�̏㉺�ɃY�������͍l���Ȃ��Ă���(��ʑ̂��_�Ȃ烉�C���Z���T�[��1�ŏ\��)�ƌ����̂��A���̎��̍l���ł��B
�u���O�L���ł́A�}5�����ʑ͓̂_�ł͂Ȃ���(�ƌ����Ă��A���ۂɂ́A�����o���邢�͏c���o�ɑΉ�����1����(��)�ł�)�ɕύX����Ă��܂��B�u���O�L���ł́A�ʂ̏ꍇ�͋P�x�����ʑ̂����o����͍̂���ƍl���A�G�b�W���o(��̓I�ɂ́A�P�x�̔����ɂ��)�ƌ��������ɐi��ł��܂��B�G�b�W���o�Ƃ͋P�x�̕ω����ł��傫���ӏ����ʑ̂ƌ��ƌ�����@�Ȃ̂ŁA��ʑ̂̓��肪�G�b�W���o�ł͕s�K���Ȃ�A���C���Z���T�[�̋P�x�M�������̂܂ܗ��p����ꍇ���܂߁A(�����ł͂Ȃ�)�ʂ̌��o���@�Ɉς˂Ă�OK�Ǝv���܂��B
(1) �ʑ����`�e�̃G�b�W���o�A�Z���T�[���Q�P�g�̗��R
http://lglink.blog81.fc2.com/blog-entry-1034.html
�����ԍ��F20062099
![]() 2�_
2�_
�A�i�X�`�O�}�[�g����
[20061315]�̈ʑ��̌ꊴ�ɕ⑫���悤�Ǝv������A��L������܂����B���������Ē����܂��B���x�����x���X�~�}�Z���I�I
�y��z�J�����p�����Y��K�l�p�����Y�̔��˖h�~���̖�����4/(�ɁEn)�ł��B
�y���z�J�����p�����Y��K�l�p�����Y�̔��˖h�~���̖����̓�/(4�En)�ł��B
�̐S�̕⑫�ł��B[20061315]�ŁA
�E�ʑ��B��F��/4�A��/2��
�E���˖h�~���̖����F��/(4�En)
�Ə����܂������A�ʑ��̔��Ɣ��˖h�~���̖����Ƃ́A�I�[�_�[(����)���قȂ�܂��B
�ʑ��͌��w�I�ٕ����A�܂�A����̊�������ܗ�no�ƈُ���̊�������ܗ�ne�Ƃ̍��u(�Ⴆ�A������)���ܗ���ne�|no��0.0092�v�𗘗p���Ă��܂��B���ܗ����ɂ�����ƈُ���Ƃɂ͈ʑ����������܂����A��=550nm�̃�/4��ɂ́A���͖�15��m�ƂȂ�܂��B
����A���˖h�~���ł́A���˖h�~���ɓ��߂������˂�����ƁA���˖h�~���߂����̕���(�P�w�R�[�g�Ȃ�A�����Y)�Ƃ̊E�ʂŔ��˂�����Ƃ̈ʑ�������/2�Ȃ�Αł����������܂��B���˖h�~���߂����̕���(�P�w�R�[�g�Ȃ�A�����Y)�Ƃ̊E�ʂŔ��˂�����́A���˖h�~������������̂ŁA���˖h�~���̖����̓�/4�̈ʑ����ƂȂ�A���˖h�~���̋��ܗ���n�̏ꍇ�A���˖h�~���̖����̓�/(4�En)�ƂȂ�܂��B���Ƀ�=550nm�An=1.4�Ƃ���ƁA���˖h�~���̖����͖�98nm�ƂȂ�܂��B
�]���āA�ʑ��̔��Ɣ��˖h�~���̖����Ƃ́A��G�c�ɂ́A�I�[�_�[(����)��2�`3���قȂ鎖�ɂȂ�܂��B
�E�g����(���ʑ���)�Ƃ�
http://www.chuo.co.jp/core_sys/images/main/pdf/38GC0994.pdf
�y�Čf�z
�E���˖h�~�w�̐v
http://kinoufilm.nof.co.jp/articles/article3-2.html
[���Ⴂ�̂��l��]
��́u���˖h�~�w�̐v�v�̐}������ƁA���̃R�����g�u1�w�R�[�g�ł�1�̃ɋߖT�ł������˖h�~���ʂ��Ȃ��v�͌��ŁA1�w�R�[�g�̔��˗��̓u���[�h�ŁA�Ȃ������߂̐��l�ƂȂ��Ă��܂��B�ǂ������݂܂���ł����B
�����ԍ��F20062392
![]() 1�_
1�_
������݂�����
>������ʑ���AF�̐����ɗp����͕̂s�K���낤�Ǝv���܂��B
�}�ł̓J�����Q�ł����A���ۂɂ͂��̃J�����̈ʒu�ɂ̓��C���Z���T�[������̂ŁA���Ȃ����Ԉ���Ă���Ƃ͂����Ȃ��Ǝv���܂��B
���~�X�^�[�E�X�R�b�v����
�܂��܂����ڂ����������肪�Ƃ��������܂��B
�u���O�A������Ɠ���̂ŁA�������ǂ܂��Ă��������܂��B
�����ԍ��F20063837
![]() 1�_
1�_
�A�i�X�`�O�}�[�g����A�݂Ȃ���A
�����ւ���ɂȂ�܂����B
���Ƃł����T����悤�ɁA�ЂƂ��Ƃ�������Ă����܂��B
�����ԍ��F20070868
![]() 2�_
2�_
����ĔL������
�R�����g���肪�Ƃ��������܂��B�������̃X���Ƃ݂Ȃ���̂������ł��낢����ɂȂ�܂����B
�܂������s�ǂ̂Ƃ��낪����܂��̂ŁA��������ǂ�ł���Œ��ł��B
��ĔL��������^��_�Ȃǂ���܂����牓���Ȃ������₨�肢���܂��B
�݂Ȃ���̂��߂ɂ��Ȃ�܂��̂ŁB
�����ԍ��F20072499
![]() 1�_
1�_
���f���[�U����
> �s���g�������Əo�͓d�͂̈ʑ����Y����Ə����Ă���܂��B
�Ȃ�قǁA������D�ɗ���������������܂����B
�����ł��A�A�A�ł͂���܂����A
�����ԍ��F20072715
![]() 1�_
1�_
�Z���T�̘b�Ō�����
���C���Z���T�̓t�H�g�_�C�I�[�h�̏W�܂�ł�����i�A���C�j
�ɂȂ郉�C���Z���T�̒��̊e�X�̃t�H�g�_�C�I�[�h�i�����o�j�̒l��ǂݏo�����z��
�Ⴆ��
�������o����ΐ^�i�s�������j�A���o�o���Ȃ��ꍇ�͋U�iFalse�j��Ԃ��t�H�g�_�C�I�[�h��
7�ō\�����ꂽ���C���Z���T�i�t�H�g�_�C�I�[�h�A���C�j����ɔz�u�����
���ꂼ��ɃX�v���b�^�ŕ������ꂽ�������e�����Ƃ����ꍇ
���͔��n�̒����ɍ�����������J���^���ȃp�^�[���Ƃ����
�W���X�s���Ȃ�Η����̃��C���Z���T�Ƃ��^�^�^�U�^�^�^�̔z���Ԃ�
�O������
A�̃Z���T�͐^�U�^�^�^�^�^��Ԃ�
B�̃Z���T�͐^�^�^�^�^�U�^��Ԃ�
AB�̔z����r����Ɛ^�U�^�^�^�U�^�ƂȂ�U�������̂Ńs���g��
�O��Ă���̂��킩��܂�
��̑���Ώۂɕ������Ă���̂ŁAAB���ꂼ��̃Y���ʂ�±�̓����ł�
�܂�W���X�s���ʒu��AB���ꂼ��̋U�̒����ʒu�Ƃ����̂��킩��܂�
�W���X�s���ʒu�̋U�ƃs������̋U��±�Q�����I�t�Z�b�g���Ă���
���̃I�t�Z�b�g�ʂ��Y���ʂƌv�Z�ł��A�����Y�̋쓮�ʂ��Z�o�ł��܂�
������A�̃Z���T���Ԃ��U�̈ʒu���W���X�s���ʒu��荶�Ȃ�O�s��
�E�ɂ���Ό�s���A�Ƃ����悤�ɃY�����������o�ł��܂���
����Ƃ����Ӗ��ł͂���Ȋ����ŏ������Ă��Ȃ��ł��傤��
���o�I�ɒu��������Q�Q�Q�L�Q�Q�Q���W���X�s��
�Q�L�Q�Q�Q�Q�Q�ƁQ�Q�Q�Q�Q�L�Q���s������
�g�`�Ƃ��čl����ƃC���[�W���₷���ł����
�����
���C���Z���T�͓�Ȃ��ƌ����I�Ɍ��o�͖������Ǝv���܂���
�܂�
���`�����C���Z���T������Ďg���Ƃ���A�m���Ɉ�ő���܂�����
�T�O�I�ɂ͂�����ē�ɂȂ��Ȃ����ƁB
�����ԍ��F20076042
![]() 1�_
1�_
�A�n�g�E�A�n�g����
���ƂȂ��A����Ȃ����Ă���悤�ȋC�����Ȃ��ł�����܂���B
�t�Ɏ���������Ă�����A���l�т̂��悤������܂���B������������������B
(1) ���C���Z���T�[�̔z�u
> ���`�����C���Z���T������Ďg���Ƃ���A�m���Ɉ�ő���܂�����
���R�Ȃ���A2�{�̃��C���Z���T�[���q������1�{�ƌ������z�͂ǂȂ��������Ă��Ȃ��Ǝv���܂��B
���ۂ̐��i�ł́A�ȉ��̂悤�ɂȂ��Ă��܂��B�]���Ēʏ�́A�u���`�����C���Z���T�v�ƌ������z�����������o�ė��Ȃ��Ǝv���̂ł����d�B
���C���Z���T�[�̔z�u�Ƒ����_�́A�u2�{��1�g�v�u1�_�v�ɑΉ����Ă��܂��B���ꂼ��̃��C���Z���T�[�́A�����̑����_�p���C���Z���T�[��1�{�ɓZ�߂��ꍇ������A���ꂼ��̑����_�ɑ��A1�{(�Ɍ�����)���C���Z���T�[���ɂ��ė��p���Ă��܂��B
[1DX�A5D3�̗�B�uF2.8�Ή��E�N���X�����v�̊W��������Ղ��Ǝv���܂�]
�E���C���Z���T�[�̔z�u
http://dc.watch.impress.co.jp/img/dcw/docs/516/132/013.jpg
�E�����_
http://dc.watch.impress.co.jp/img/dcw/docs/516/132/015.jpg
(2) �ʑ���AF�̌���
> ���C���Z���T�͓�Ȃ��ƌ����I�Ɍ��o�͖������Ǝv���܂���
�A�n�g�E�A�n�g����ɋ������u���͔��n�̒����ɍ�����������J���^���ȃp�^�[���v�Ȃ�A1�{�̃��C���Z���T�[�ɂđ����\�ł��B�ڂ����́A�ȉ��́u������x�A�ȉ��̃u���O�L���������������B�v�ȍ~�̔�ʑ̂�_�Ƃ����ꍇ�ɂ����������B���R�A���p�����u���O�L�������킹�Ă����������B��ʑ̂��_�̏ꍇ�́A���œ_�͏��a0�Ȃ̂ŁA���C���Z���T�[��1�ŏ\���ł��B�}5�ȍ~�ł́A���œ_��a0����e0�����Y���܂����Ae0��1�{�̃��C���Z���T�[�����ł͔c���o���܂���B���C���Z���T�[��2�{��1�g�Ƃ���ƁAe0�͏����o���A�����\�ƂȂ�܂��B
http://bbs.kakaku.com/bbs/-/SortID=20056837/#20062099
�����ԍ��F20076271
![]() 1�_
1�_
������Ă܂����O�O�G
���낢��[�ǂ݂��߂�����Ȃ��ł�����
�����ԍ��F20076367
![]() 1�_
1�_
 |
 |
|---|---|
�s���g��������� |
�s���g���������� |
���A�n�g�E�A�n�g����
> ���C���Z���T�͓�Ȃ��ƌ����I�Ɍ��o�͖������Ǝv���܂���
���̒ʂ�ł��B
�ʑ���AF�̌����ł����A�����Y�̉E�����痈���������鑜�ƃ����Y�̍������痈���������鑜���A�s���g�������Ă��Ȃ��ꍇ�͂���܂��B
���̂��ꂩ�烌���Y�̍��ňʒu���v�Z�ŋ��߂邱�Ƃ��o���܂��B
�t�H�[�J�X������������ɂ́A���̂�����Z���T�[�Ō��o���ă����Y�����ňʒu�֓����������킯�ł��B
�����ԍ��F20078753
![]() 1�_
1�_
����݂�����A�A�n�g�E�A�n�g����
�u���O�L����M���߂��Ȃ̂�������܂��A��ʑ̂��_�Ȃ�A���C���Z���T�[��(��ʑ̂܂ł̋����Ɉ˂炸���œ_��a0�ŌŒ肳��Ă���̂�)1�{�ő����\(�ꔭ(1��̃��C���Z���T�[�ǂݎ�肾��)�ō��œ_�����)�Ǝv���Ă���̂ł����A�Ԉ���Ă��܂����H
��ʑ̂���(*)�ɂȂ��Ďn�߂āA���œ_��a0����e0��������܂��B1�{�̃��C���Z���T�[�����ł�e0�͓���o���܂��A2�{�̃��C���Z���T�[��g�ݍ��킹��Ae0�͏����o���A�����\(�ꔭ�ō��œ_�����)�ƂȂ�܂��B
����l�Ȃ�S�����m�̎��Ȃ̂ŁA�����������݂�܂����A�R���g���X�gAF���s�[�N�ʒu(���œ_)����肷��ׂɃs�[�N�ʒu�O����������Ȃ��Ƃ����Ȃ��̂ɑ��A�ʑ���AF�ł͈ꔭ�ō��œ_�����o���܂��B
(*)
���ۂɂ́A���Ƃ��Č��o����܂����A���ɂ͋P�x���z�����݂���K�v������܂��B���ɋP�x���z�����݂��Ȃ��ꍇ�ɔ����A�N���X��������������Ă��܂��B
�y�Čf�z
(1) �ʑ����`�e�̃G�b�W���o�A�Z���T�[���Q�P�g�̗��R
http://lglink.blog81.fc2.com/blog-entry-1034.html
�����ԍ��F20078881
![]() 1�_
1�_
�⑫�ł��B
�ȉ��́A�u���O�L�����̂܂܂Ȃ̂ŁA�u���O�L�������ǂݒ����Ă���Ȃ�A�X���[���ĉ������B
�u���O�L���ł͌�s���A�O�s�������ꂼ��A�f�A�f�f��p���ċ�ʂ��Ă��܂����A�ȉ��ł͏ȗ����܂��B�������K�X�A�ɍ��킹�Ă��l���������B
�y��ʑ̂��_�̏ꍇ�z�@���͓_�����Ƃ��܂��B
2�{�̃��C���Z���T�[��ł́A�s���g�������Ă��Ȃ��ꍇ�A�t�����ɁAa0���烢1�����P�_������܂��B�������t�Ȃ����ŁA�Y���ʂ͂ǂ������1�ł�����A��1�̃Y�������������(�ړ��ʂ��|��1�Ƃ����)�A���ł��܂��B�܂�1�{�̃��C���Z���T�[�����ő����\�ł��B
�y��ʑ̂���(*)�̏ꍇ�z
2�{�̃��C���Z���T�[��ł́A�s���g�������Ă���ꍇ�Aa0����A��������e0��������܂��B�s���g�������Ă��Ȃ��ꍇ�́A�t�����Ƀ�1��������܂��B�]���āA���ꂼ��̃��C���Z���T�[�ł́A�u±��1�{e0�v���������̂ŁAe0������o���Ȃ�����A1�{�̃��C���Z���T�[�����ł͑����s�ł��B2�{�̃��C���Z���T�[��Ŏg�p����Ae0�͏����o���A2�{�̃��C���Z���T�[�̂��ꂼ���a0����̃Y����e1�Ae2(�̍��������)�����ŁA�ړ��ʁ|��1���Z�o�o���܂�(��2�A��4)�B�܂�A�����ɂ�2�{�̃��C���Z���T�[���K�v�ƂȂ�܂��B
(*)
���ۂɂ́A���Ƃ��Č��o����܂����A���ɂ͋P�x���z�����݂���K�v������܂��B���ɋP�x���z�����݂��Ȃ��ꍇ�ɔ����A�N���X��������������Ă��܂��B
�����ԍ��F20079558
![]() 1�_
1�_
����オ���Ă܂��ˁH
���̗����Ƃ��ẮA�����P�_AF �Ɍ��肷���
�E��ʑ̂�������ɓ_�Ƃ��Ă���Ȃ烉�C���Z���T�[�͂P�{�ł����B
�E��ʑ̂��������班�����ꂽ�ʒu�ɂ���Ȃ烉�C���Z���T�[�͂Q�{�K�v�B
�Ǝv���Ă��܂��B
���R�̓~�X�^�[�E�X�R�b�v���q�ׂ��ʂ�ł��B
��ʑ̂�������ɂ���Ȃ�A�^�^�U�^�^�^�^�^�^��^�^�^�^�U�^�^�^�^�Ɏ����Ă���悢�ł��B
��ʑ̂Ƀs���g�������Ă��邯�nj������炸��Ă���ꍇ�A�^�^�U�^�^�^�^�^�^�ƂȂ��āA�Z���T�[�ɂƂ��Ă̓s���g������Ă���悤�Ɍ����܂��B
�����h�����߂ɁA�����Е��̌����̃��C���Z���T�[��z�u����ƁA�^�^�U�^�^�^�^�^�^�ɂȂ��Ă���͂��ł��B���������ƂO�Ȃ̂ŁA�s���g�͂����Ă��邱�Ƃ��킩��܂��B
���Ԃ�Ȋ�������Ȃ����Ɨ������Ă���̂ł����A�ǂ��ł����ˁB
�����ԍ��F20079954
![]() 1�_
1�_
�u�_�Ȃ�v�Ƃ̂��Ƃł���
�u�_�v���ǂ���������Ă��邩�͂킩��܂���
�T�O��̘b�ł����Ȃ�Z���T�ЂƂł��Y���ʌ��o�͉\�ł�
��������͌����ł͂��肦�܂���
�܂��āu�ʑ����v�ł͂Ȃ��ł�
�u�q�ށv�Ȃ�Ў�ł�����ł��ł��܂���
���肶��Ȃ��Ɓu�����v�Ƃ͂����܂���
2�̈ʑ��̍������𗘗p���邩��u�ʑ����v�ł���
������ł͈ʑ��u���v�͔������܂���
���͂��̃X���b�h�́u�ʑ����v�̂��b�����Ă���Ǝv���Ă��܂��̂�
�I�n���̊ϓ_����u�����I��2�K�v�v�Ɛ\���グ�Ă��܂�
�����ԍ��F20080150
![]() 1�_
1�_
���~�X�^�[�E�X�R�b�v����
����ȏ������ł̓Z���T�[����ł��������s���܂����A���p���ꂽ�u���O�ł���ʓI�ȏ����ł̓Z���T�[�͓�K�v�Ƃ������_�ɂȂ��Ă���Ǝv���܂��B
�����ԍ��F20080155
![]() 1�_
1�_
��Վ����@�̈ʒu�Z���T�[�i���s�j�Ƃ��͂P�ł���
����͕��i�i��ʑ́j�ɐ����Ă���O��Ȃ̂�
��v��ʑ̂��Z���T�[����͂��ɍ\���Ă���\��������Ȃ�
�Q�K�v���Ǝv���܂�
�����ԍ��F20080443
![]() 1�_
1�_
�A�i�X�`�O�}�[�g����A�A�n�g�E�A�n�g����A����݂�����A�Ђ�N�Ђ�N����
���̐ق������ɁA�R�����g�����A�ǂ������肪�Ƃ��������܂��B
�A�i�X�`�O�}�[�g����
���̌�����������������Ղ������������A���肪�Ƃ��������܂��B
�Ђ�N�Ђ�N����
> ��v��ʑ̂��Z���T�[����͂��ɍ\���Ă���\��������Ȃ�
> �Q�K�v���Ǝv���܂�
���̂������́A���̌����ɋ߂��悤�Ɋ������̂ł����A����������OK�ł��傤���H
�A�n�g�E�A�n�g����A����݂�����
�A�n�g�E�A�n�g����₶��݂�����Ɍ���Ȃ��̂ł����A���́A2�{�̃��C���Z���T�[���K�v�����A�u���O�L���������ƁA�����ł͋�̓I�ɔ[���o����������Ȃ���Ă��Ȃ��Ǝv���Ă��܂��B���������A���C���Z���T�[�Ɋ�_a0�����݂��鎖���������Ȃ���(����l�̎��ł͂���܂���)��������悤�Ɋ����Ă��܂��B�J��Ԃ��ɂȂ�܂����A2�{�̃Z���T�[�ɂ�����a0����̃Y����e1�Ae2�́A�������̃Y��e0�Ƌt�����̃Y����1�̘a�Ȃ̂ŁAe1��e0�{��1�Ae2��e0�|��1�ƂȂ�܂��Be0���������A�s���g����ɂ��ړ��ʃ�1�����߂�A�ꔭ�ō��łɎ����Ă����܂��B
���Ⴂ��������r���\����Ȃ��̂ł����A�A�n�g�E�A�n�g����̂������͌��_���肫�ɂȂ��Ă���Ǝv���܂��B
> 2�̈ʑ��̍������𗘗p���邩��u�ʑ����v�ł���
> ������ł͈ʑ��u���v�͔������܂���
����ł́A�����������́AAF�ɁA�u�ʑ����v�A�܂�u�ʑ��v�𗘗p���Ȃ���Ȃ�Ȃ����A�S��������܂���B
����栂��łȂ���������܂��A�u�G�A�R���v�����グ�܂��B�u2�̈ʑ��̍������𗘗p���邩��u�ʑ����v�ł��v�ƌ����Ă���̂́A�u�G�A�R���̓G�A�E�R���f�B�V���i�[�̗��������g�[���o�����ł��v�ƌ����Ă���悤�ȃ��m�ł��B�ǂ���̕\����(���������@�\��L���Ă���O���)���_���肫�̕\�����Ǝv���܂��B�����G�A�R���ŗ�g�[���o���闝�R���������Ȃ�A�u�M�}�̂̋C���M����ыÏk�M�𗘗p�����q�[�g�|���v�ŁA��[���ƒg�[���ɂ͔M�}�̗̂�����t�����ɂ���v�݂����Ȋ����ɂȂ�Ǝv���܂��B�u�G�A�R���̓G�A�E�R���f�B�V���i�[�̗��v�Ɓu2�̈ʑ��̍������𗘗p���邩��ʑ����v�Ƃ��A���ۂ̎d�g�݂Ɋւ��ĉ������y���Ă��Ȃ����͂��[���������ł��傤���H�H
�Ȃ��A�A�i�X�`�O�}�[�g����̍ŏ��̂�����u�ʑ���AF�̂��������ʑ��Ƃ́H�v�ɑ��āA���͐��m�ɂ͓������܂��A�u�ʑ��v�̌ꊴ�Ɋւ��āA�ȉ��ŐG��Ă��܂��B
[���̈ꕔ�Ɍ�肪����܂�]
http://bbs.kakaku.com/bbs/-/SortID=20056837/#20061315
[����2�����̒����ł�]
(�uF(��) �̑傫���ƈʑ��ɂ��āv�܂ł̉ӏ�)
http://bbs.kakaku.com/bbs/-/SortID=20056837/#20062099
(�����y�ѕ⑫�ł�)
http://bbs.kakaku.com/bbs/-/SortID=20056837/#20062392
�����ԍ��F20080516
![]() 1�_
1�_
���ԂC��CCD�����l�̂͂Ȃ������̂�
�N���[��
���g���������u��i�ƁA
���̎��g��������i�̔�����������d���ɉ��������H�U����i��
�O�����H�U����i�ɂ���ē����ꂽ���ʊϑ���i�ɂ��o�͓d���ϓ���
�����g���������u�Ւf��p����
�ʂ̌��H�U����i�ɂ���Ă���ꂽ�ʂ̏o�͓d���ϓ���p���A
���Ƃ̎��g���������u�̈ʑ��A
�ŏ��̏o�͓d���ϓ��̈ʑ��A
�ʂ̏o�͓d���ϓ��̈ʑ��ƁA
�R�ʑ����v�����邱�Ƃɂ����̌����i�s���g�j�ʒu���v������s���g���o���u
��̓I�ɂ͑��p�`��]�~���[�ł�
�����ԍ��F20081136
![]() 1�_
1�_
�~�X�^�[�E�X�R�b�v����
>�A�n�g�E�A�n�g����̂������͌��_���肫�ɂȂ��Ă���Ǝv���܂��B
���߂�Ȃ����A�G�A�R���̗Ⴆ�͉����肽���̂��S���킩��܂���
�����Ȃ��āu���_���肫�v�Ȃ̂��H�Ȃ����̂悤�ȕ����ɘb�������̂�
�T�b�p�������ł��܂���
����Ȍ������ɂȂ邩������܂���
�ȒP�Ȃ��Ƃ��킴�킴����ɗ������悤�Ƃ��Ă���Ƃ�����
�����̌����ȊO�ł͔[���������Ȃ������Ƃ������E�E�E����ȕ��ɂ݂��܂�
�����ԍ��F20081394
![]() 1�_
1�_
���A�n�g�E�A�n�g����
�Z���T�[���Q�K�v�ȗ��R�́A1�{�ł͎��p�I�ȃI�[�g�t�H�[�J�X�͏o���Ȃ�����ł��B
�Z���T�[1�{�ł͔�ʑ̂𐳊m�Ƀ����Y�̌�����ɕ߂炦�邱�Ƃ��K�{�ł����A�莝���ł͕s�\�ł��B
�O�r���g�����Ƃ��Ă���ʑ̂����C���Z���T�[��1�s�N�Z�����x�̌덷�Ō�����ɕ߂炦�邱�Ƃ́A���t�̌��w�t�@�C���_�[�ł͕s�\�ł��B
�~���[���X����MF�A�V�X�g�̂悤�Ȕ�ʑ̂̊g��\�����K�v�ł��傤�B
�X�ɔ�ʑ̂̓R���g���X�g�̂͂����肵���ׂ��_�̂悤�Ȑ}�`�Ɍ����܂��B
���_�I�ɉ\�ł����Ă��A���p�I�ł͂���܂���B
�����ԍ��F20081478
![]() 1�_
1�_
����݂�����
�������A�ǂ������肪�Ƃ��������܂��B
�A�n�g�E�A�n�g����
�C�������Ȃ�������A�\����܂���B�����A���ȊO�̕�����̂������Ȃ�A���[��������Ƃ͎v���܂��B�����A�������悤�ł����A�A�n�g�E�A�n�g����̂���������ׂĂ݂܂��B
[20076042]�@���@�����������Ă���̂ł́H�ƍŏ��ɂ��q�˂����������݂ł��B
> ���͔��n�̒����ɍ�����������J���^���ȃp�^�[���Ƃ����
>
> �W���X�s���Ȃ�Η����̃��C���Z���T�Ƃ��^�^�^�U�^�^�^�̔z���Ԃ�
>
> �O������
> A�̃Z���T�͐^�U�^�^�^�^�^��Ԃ�
> B�̃Z���T�͐^�^�^�^�^�U�^��Ԃ�
>
> AB�̔z����r����Ɛ^�U�^�^�^�U�^�ƂȂ�U�������̂Ńs���g��
> �O��Ă���̂��킩��܂�
>
> ��̑���Ώۂɕ������Ă���̂ŁAAB���ꂼ��̃Y���ʂ�±�̓����ł�
> �܂�W���X�s���ʒu��AB���ꂼ��̋U�̒����ʒu�Ƃ����̂��킩��܂�
>
> �W���X�s���ʒu�̋U�ƃs������̋U��±�Q�����I�t�Z�b�g���Ă���
> ���̃I�t�Z�b�g�ʂ��Y���ʂƌv�Z�ł��A�����Y�̋쓮�ʂ��Z�o�ł��܂�
�����܂ł̂������́A�u���O�L���̔�ʑ̂�_�Ƃ����ꍇ�ƑS������ł��B�܂�A1�̃��C���Z���T�[�����ő����\�ł��B�����g�ł��uAB���ꂼ��̃Y���ʂ�±�̓����v�u�W���X�s���ʒu�̋U�ƃs������̋U��±�Q�����I�t�Z�b�g�v�Ƃ������ɂȂ��Ă��܂�����A�v���X���邢�̓}�C�i�X�̃��C���Z���T�[1�{�����ŁA�u���̃I�t�Z�b�g�ʂ��Y���ʂƌv�Z�ł��A�����Y�̋쓮�ʂ��Z�o�ł��܂��v���ɂȂ�܂��B�J��Ԃ��܂����A�����ł̂������ł́A���C���Z���T�[��2�{�K�v�Ȃ��A1�{�ŏ\���ł��B
[20080150]
> �u�_�Ȃ�v�Ƃ̂��Ƃł���
> �u�_�v���ǂ���������Ă��邩�͂킩��܂���
> �T�O��̘b�ł����Ȃ�Z���T�ЂƂł��Y���ʌ��o�͉\�ł�
�A�n�g�E�A�n�g����̏�L[20076042]���܂������A�u�T�O��̘b�v�ɂȂ�܂��B
�A�n�g�E�A�n�g�����C���Z���T�[��2�{�K�v���Ƌ��Ă���̂́A�ȉ��̉ӏ����Ǝv���܂��B
[20076042]
> ���C���Z���T�͓�Ȃ��ƌ����I�Ɍ��o�͖������Ǝv���܂���
[20080150]
> �I�n���̊ϓ_����u�����I��2�K�v�v�Ɛ\���グ�Ă��܂�
�p��̎g�����Ƃ��ăL�b�`���Ƃ������܂肪�����ł͂���܂��A�u�����I�Ɂ`�v�ƌ������ꍇ�A�����҂͂��̌��������Ȃ��Ƃ������A�Ȃ������Α��҂ɐ����o���Ȃ��Ƃ����Ȃ��ƁA���Ȃ��Ƃ����͎v���܂��B����������������o���Ă��Ȃ��Ȃ�A�u�����I�v�͎g�킸�A�u�l�I�ɂ́`���Ǝv���v�Ƃ��u�����̐����ɂ��ƁA�`�v�ƌ������`�̔����̕������������Ǝv���܂��B
[20081394]
> �����̌����ȊO�ł͔[���������Ȃ������Ƃ������E�E�E����ȕ��ɂ݂��܂�
�u�����̌����ȊO�v�Ƌ��܂����A���Ȃ��Ƃ��A�A�n�g�E�A�n�g�����C���Z���T�[��2�{�K�v�Ƃ���鍪��(������(���̎�)�̌����ȊO)�͂������ɂȂ��Ă��Ȃ��Ǝv���܂��B
���͎��͂ł͕�����Ȃ������̂ŁA�u���O�L�����Q�l�ɂ��Ă��܂��B�u�����I�v�łȂ��A��ʑ̂���(�Ђ�N�Ђ�N����₶��݂�����̂��������A��萳�m�ȕ\���Ǝv���܂�)�̏ꍇ�ɂ́A2�{�̃��C���Z���T�[�ɓ������A�����������ʂ̃Y��e0�������邽�߁A2�{�̃��C���Z���T�[�̊�_a0����̃Y��e1�Ae2�́Ae1��e0�{��1�Ae2��e0�|��1�ƂȂ�̂ŁAe0����������ׁAe1�Ae2�̍��������A�ړ��ʃ�1�����߂鎖�͍ĎO�\���グ�ė����ʂ�ł��B���ɁAe0����1���t�����ɃY����Ƃ�����Ae0��ʂ̎�i�œ��肷��K�v���o�ė��܂����A�ʑ���AF���Ȃ��������́A���C���Z���T�[(�Ђ�N�Ђ�N����ɂ��Ɣ��������͑��p�`��]�~���[�������ł���)��2�{��p����Ae0�������o����ƕ������Ă������炱���A2�{�̃��C���Z���T�[���g�p���悤�Ǝv���t������ł���ˁH
�ȉ��������̉��p�ƌ��������ł��B
�E�_�[�N�
https://ja.wikipedia.org/wiki/%E3%83%80%E3%83%BC%E3%82%AF%E8%A3%9C%E6%AD%A3
(�]�k�ł����A�ŋ߂̓R���|�W�b�g�����p����ꍇ�������Ǝv���܂��B�����A���킹�ă_�[�N����s���ꍇ������悤�ł�)
�E�R���|�W�b�g�B�e��
http://www.el-wind.info/lecture/compos02/
> �G�A�R���̗Ⴆ�͉����肽���̂��S���킩��܂���
> �����Ȃ��āu���_���肫�v�Ȃ̂��H�Ȃ����̂悤�ȕ����ɘb�������̂�
> �T�b�p�������ł��܂���
栂��ɉ����g���������X�Y�̂ł����A����̓G�A�R�����g���܂����B�ȉ��Ȃ�A�������Ē�����ł��傤���H
> 2�̈ʑ��̍������𗘗p���邩��u�ʑ����v�ł���
> ������ł͈ʑ��u���v�͔������܂���
�́A�u�Œ��������͓��������瓮���v�u�R���d�r�͓d�r������[�d�o����v�u��̗L�Q���ۂ͗L�Q�����畛��p�̎��v�B���͂���ȏ�A�v�������т܂��A�V���莮�ɂ��b�ɂȂ��Ă������͂͂Ȃ��Ǝv���܂��B
1����24���ԂȂ̂́A�u�n���̎��]����23����56��(���ύP����)�{(���]�ɂ��A���z�ɑ�360�x��]����ɂ́A360�x�ȏ㎩�]���Ȃ��Ƃ����Ȃ���)��4���v�ɂ��܂��B�u1��������24���ԂȂ͓̂�����O�v�Ǝv�����ޑO�ɁA�����I�ɁH���l���ɂȂ��Ă͔@���ł��傤���H
�E�P����
https://ja.wikipedia.org/wiki/%E6%81%92%E6%98%9F%E6%97%A5
�����ԍ��F20081847
![]() 1�_
1�_
�Ȃ������܂ŗ��܂��̂������ł��܂���
�悤����Ɂu�A�n�g�E�A�n�g�͂킩���ĂȂ��v��
���������̂ł��傤���ˁH
�����v�������̂ł������Ō��\�ł���B
�����X�|�b�N���ǂ��l���悤��
�ʑ������o�ɂ́u�����I�Ɂv�ɂȂ�2�̃Z���T���K�v�ł���
������̃Z���T�ł́u�����I�Ɂv�ʑ������o�͂ł��܂���
�u�����v�̐������K�v�ł�����
���̃X���b�h���ŋM�����g���A�������͈Ⴂ�܂��������A
�܂�����݂����͂��ߏ��Z���������Ă��܂���
���Љ�ꂽ�u���O�ŁA����ȏ�Ȃ����炢�ڍׂɐ���������
�}������Ă��܂��B
������ǂ�łȂ��u�ЂƂ̃Z���T�ł��ʑ������o���ł���v��
�����̂����ɂ͗����ł��܂���B
���ꂪ���̗���s���ł���A�Ƃ����̂ł����
�����~�Q�A����グ�A���̓��������Ƃ������Ƃ�
����ȏ�̃R�����g�͕s�v�ł��B
�����ԍ��F20081995
![]() 1�_
1�_
�A�n�g�E�A�n�g����
�s�����Ȏv���������Ă��܂��A���ɐ\����܂���B�[�����l�ђv���܂��B
�y�֑��z
�ȉ��́A�������ĉ������B
> ������ǂ�łȂ��u�ЂƂ̃Z���T�ł��ʑ������o���ł���v��
> �����̂����ɂ͗����ł��܂���B
�ǂ����Ęb���ʂ��Ȃ��̂��A�Q��������܂����B���́u(��ʑ̂��_�̏ꍇ)1�{�̃��C���Z���T�[�����ő����\�v�ƌJ��Ԃ��q�ׂė��܂������A�u1�{�̃��C���Z���T�[�����ňʑ������o���\�v�Ƃ͈�x�������Ă��܂���B�����]�X���ǂ�����o�ė����̂����A���_���s���܂��B
�A�i�X�`�O�}�[�g����A�Ђ�N�Ђ�N����A����݂�����̃R�����g����A��ʑ̂��_�ł����Ă��A����(�����_����������Α����_��H)�ɂȂ���A2�̃��C���Z���T�[���K�v�ł���Ɖ��߂ĕ�����܂����B����[20062099]�ŁA
�u���́A�_�������}2�`4�̏㉺�ɃY�������ł��B���̎��́A���ł̏ꍇ�A�_�����ɂ��P�_�͐}5�̉��ɑ�������͂��Ȃ̂ŁA���ł̈ʒu�́Aa0����e0�����Y���܂��B�������A�}6�̉��ɂ��鎮1�Ǝ�2�̂悤�Ɉ����Ae0�������o���܂��B�܂�Ae0����������ׁA2�̃��C���Z���T�[���K�v�ƂȂ�܂��B�v
�Ƃ͐\���グ�����̂́A���ǁA�����_�����������OK�����H�ƍl���Ă��܂��A���C���Z���T�[��2�{�K�v�Ȃ̂́A��ʑ̂���(���ۂɂ͐�)�̎������ƌ����l���Ɏ����Ă��܂����B3�l�̕����炲�������f���������ŁA1�{�̃��C���Z���T�[�����ő����\�Ȃ̂͏�L�̓�������̎��������ƁA�l�������߂鎖���o���܂����B�ǂ������肪�Ƃ��������܂��B
�����ԍ��F20082134
![]() 0�_
0�_
�~�X�^�[�E�X�R�b�v����
>���́u(��ʑ̂��_�̏ꍇ)1�{�̃��C���Z���T�[�����ő����\�v�ƌJ��Ԃ��q�ׂė��܂������A
>�u1�{�̃��C���Z���T�[�����ňʑ������o���\�v�Ƃ͈�x�������Ă��܂���B
���ƂĂ��̃X���ł͈�т��Ĉʑ����̘b�����Ă�������ł����E�E�E
�L���ɊԈႢ���Ȃ���A�͂��߂Ɏ��̃R�����g�����p���ꂽ�̂̓X�|�b�N����ł��B
�����ԍ�[20076271]�ł����A
�^�C�g����
>(2) �ʑ���AF�̌���
�Ƃ���
�ȉ��̎��̃R�����g
> ���C���Z���T�͓�Ȃ��ƌ����I�Ɍ��o�͖������Ǝv���܂���
�ɑ��A�X�|�b�N����́u�\�ł���v�Ƃ�����������̂��[���ł��B
���ꂪ�ʑ����̂��Ƃ������Ă���̂łȂ����
���̓lj�͕s���A�v�����݂ł��ˁB�\�������܂���ł����B
�b�x��
�ȉ��͎֑��́u�l�I�����v�ł��̂œǂݔ���Ă��������Ă����\�ł���
�u���͔��n�̒����ɍ�����������J���^���ȃp�^�[���v�܂��Ⴆ�u���n�̒����ɓ_�v
�����́u�_�E�����`�悳�ꂽ���ʁv�ł����āA�u�_�v�ł͂���܂���
���_��́u�_�v�Ȃ�A������̂ǂ̈ʒu�ł��_��ۂ��܂��̂�
�����{������ׂ��ʒu���[�[�[���[�[�[�Ƃ킩���Ă���̂Ȃ��
�������ɃZ���T��̏ꍇ�ł��[�[�[�[�[���[�ƃY���ʂƕ��������o�ł��܂�
�ł������ۂ̕��̂̓��[�U�[�̂悤�ɒ��i�I�Ȍ�����_�����ł͂���܂���
�Ȃ̂Ńs���g�������Ă��Ȃ���Z���T��ł̓{�P�܂�
���̏�Ԃł͏�L�̂悤�ɐ��m�ȃY���ʂ͌��o�ł��܂���
�{�P�ăG�b�W���B���ɂȂ�܂����A���̗ʂ͋����ɂ���ĕω����܂�
���ہ[�����ہ[�����O���[�̐��݁A�Ƃ����悤�ɁB
���̃G�b�W�̊g��ʁE�Z�W�Ƌ����̑��փe�[�u���ł�����A��̃Z���T�i���ʁj�ł�
��r�Q�ƂŃY���ʂ�����o�����Ƃ͕s�\�ł͂Ȃ��ł��傤���A����������ł�����������
�܂��Ĉʑ��������̂悤�ɃY���ʂ���������p�I�Ɍ��o����͍̂���ł͂Ȃ����Ǝv���܂�
�����Z���T��ł�낤�Ƃ���Ȃ�
�R���g���X�g�����̕��������葁�������p�I����Ȃ��ł��傤��
�����Ƃ��A����Ȃ�Z���T�͎B���Z���T�Ō�����ł��܂�����
�ʂɃ��C���Z���T�݂���Ӗ����Ȃ��̂ł����ǁB
�����ԍ��F20082406
![]() 2�_
2�_
�ӂƋ^��Ȃ̂ł����A�s���g�������Ă��Ȃ��ꍇ�A���C���Z���T�[��ł����̓{�P�Ă���̂ł��傤���B
�L���m���̂g�o������ƁA�s���g������Ă���ꍇ�A���H�����ω����Ă��āA�s���g������Ă��Ă����C���Z���T�[��ł̓s���g�����Ă���悤�Ɍ�����̂ł����A�ǂ��Ȃ̂ł��傤���B
http://web.canon.jp/Camera-muse/tech/report/2011/09/
�����ԍ��F20082457
![]() 0�_
0�_
�A�i�X�`�O�}�[�g����
���͗��n�Ȋw���l�ł͂Ȃ��̂�
�\�R�͊m�M�����Đ����ł��܂��i�Ȃ̂Łu�l�I�����v�ƒA���������Ă��܂��j
�X�R�b�v����i���݂܂���A�X�|�b�N����Ȃ�������ł��ˁE�E�E�\����Ȃ��ł��j��
�Љ��Ă���u���O���́h�}�R�h�̐����̒��ł������G����Ă��܂���
�i�ȉ����p�j-------------------------------------------------------
�Ȃ��A���m�ɂ́A�`�e�Z���T�[��̑��́A�}�Q�ƈ���ăs���g�����킸�A�{�P�Ă��܂��B
�{�P�����̒��S�_���A���̈ʒu�ł��B
----------------------------------------------------------------
���̂悤�ɗ������Ă��܂���
�L���m���̐����ł���E�E�E
�t�H�[�J�X�����Y���������Əœ_�ʂ��ړ����Ă��܂����
����ŏœ_�ʂ������A���R�`�e�Z���T�̓����Y�Ƃ̈ʒu�W�͕ς��܂�����
�����Y����̌����ʂ����C���Z���T�ʂƂ����Ǝv���܂���
���̖͎��}�ł͌����ʂ̓��C���Z���T��̂܂܂ł�
�����Y�̋��ܗ����ς��ł����Ȃ�����A���̂悤�ɂȂ鎖�͂Ȃ��Ǝv���܂����E�E�E
����͂����܂ō쓮������������邽�߂̖͎��}�Ȃ̂ł͂Ȃ��ł��傤���H
�����ԍ��F20082693
![]() 2�_
2�_
�������͂ڂ����Ȃ����Ǝv�����̂ł����A�ȉ��̐}������ƁA��͂�s���g�������Ă���悤�Ȑ}�ɂȂ��Ă��܂��B
http://image.itmedia.co.jp/l/im/dc/articles/1009/14/l_hi_af01.jpg
�s���g�����ꂽ���������C���Z���T�[��ł̌����ʒu���ω����Ă��܂��B(���H�����ω����Ă���j
�܂�A�c�ʒu�ɂ��ꂽ�t�H�[�J�X�����ʒu�ɒu���������Ă���A�ƂƂ炦�邱�Ƃ��ł���̂��ȂƎv���܂����B
�}�ɖ�肪����̂��A���ۂ����Ȃ̂��A���̓_�����f�ł����ɂ��܂��B
�����ԍ��F20082739
![]() 0�_
0�_
���C��CCD��͒l���傫��64�Ƃ�128���炢����̂�
��r�I���ɂȂ��Ă���Ǝv���܂�
�܂��A�{�P�Ă��Ă��p�^�[���}�b�`���O�͂ł����_�v���܂��B
�����ԍ��F20083529
![]() 1�_
1�_
k�^�X�N���[���Ń}�b�g�ʂ̓{�P�Ă��Ă�
�X�u���b�g�Ȃ��͂͂����茩���܂�����B
�����ԍ��F20083555
![]() 1�_
1�_
�A�n�g�E�A�n�g����
�����炱���A����������\���������������l�ђv���܂��B
�������q�ϓI�ɍl����悤�w�߂Ă������ł��A��͂�F���������̘g�O�܂Ŋg�����ՓI�ɑ�����̂́A���Ȃ��Ƃ����ɂ͍���Ȃ悤�ł��B
���߂āA���l�ѐ\���グ�܂��B
�A�i�X�`�O�}�[�g����A�A�n�g�E�A�n�g����A���̑��̊F����
�ƂĂ��Q�l�ɂȂ鎑�������t���܂����B1989�N�ɃL���m���̕����������ɂȂ�ꂽ����ł��B���{���w��@�֎��ւ̊�e�Ȃ̂ŁA�f�l����̂悤�ȕ�����Ղ��ȗ������ꂽ���e�ł͂Ȃ��A���ۂɎg�p����Ă���Z�p���e���L�ڂ���Ă��܂��B����A���ǂ݂ɂȂ��ĉ������B
�E���t�J�����̃I�[�g�t�H�[�J�X�Z�p/ ��،���
https://annex.jsap.or.jp/photonics/kogaku/public/18-11-kaisetsu2.pdf
�ȉ��Ɏ����C�t�����_����܂��B����s�����ɂ��ԈႢ/������X����Ǝv���܂����A���e�͒�����A�K���ł��B
�}1�́A�u�B�e�����Y�̌�����ɕ��̂Ƃ��ē_����������ꍇ�v�Ȃ̂ŁA(�{�����ɋL�ڂ͂���܂���)1�{�̃��C���Z���T�[�݂̂ő����\�ȏꍇ�ɑ������܂��B
�����Ă����ɁA�u������̓_���̂Ő��������c�_�͎��O���_�ł��ς��Ƃ���͂Ȃ�. 2����A, B����`�������2���̐�ΓI�ʒu���S�̂Ƃ��Ă���邱�ƈȊO, 2���̑��ΓI�ʒu�W�͎���̏ꍇ�Ɠ��l�ł���. ���ڂ��Ă���̂�2���̑��ΓI�ʒu�ł���, ���̌`��������ΓI�Ȉʒu�͖��ɂ��Ă��Ȃ�.�v�Ƃ���܂��B�u2���̐�ΓI�ʒu���S�̂Ƃ��Ă���邱�Ɓv���u���O�L����e0�ɑ������܂����A�u���ڂ��Ă���̂�2���̑��ΓI�ʒu�v�Ɩ��L����Ă��܂��B�v����ɁA2�{�̃��C���Z���T�[���K�v�ƌ������ł��B
�A�i�X�`�O�}�[�g���C�ɂȂ����Ă�{�P���Ɋւ��ẮA�ȉ��̋L�ڂ��Q�l�ɂȂ�Ǝv���܂��B�uAF���w�n�̎�����̍l�����͎B�e�n�Ƃ͈قȂ�, �����X�|�b�g�����������邱�Ƃ���,�f�B�X�g�[�V�������Ȃ������Ƃɏd�_���u����Ă���.�v�u�������v�������ʂ͑��ΓI�ʒu�ω��ʂȂ̂ŃZ�p���[�^�����Y�n�̃f�B�X�g�[�V�����̍��ق����ł���.�v�u���,AF���w�n�̉𑜐��\�͂��܂荂���K�v�͂Ȃ�. �ނ���K�x�Ɍ��w�����g�����Ă����, ���w�I���[�p�X�t�C���^�[�Ƃ��ċ@�\��, �C���[�W�Z���T�[�̃T���v�����O�n�ō����g�ܕԂ��c���E��Ȃ��悤�ɂȂ�̂Ŗ]�܂���. �v
�����X�����L�q�̈���ȉ��ł��B����قǖ��m���Ȗ��ȁA�ʑ���AF�ƃR���g���X�gAF�̊T�O���������܂œǂ����A���͂���܂���ł����B�u�ʑ��������Ƃ͂܂��Ɍ��w���̋�Ԏ��g�������̈ʑ����(�V�t�g���)��{���I�ɂ͌��m���Ă���,��r�I�Ⴂ��Ԏ��g���ɒ��ڂ��Ă���. ���̓_�͍����g�����̑���������R���g���X�g���m�����Ƃ͊�{�I�ɈقȂ�Ƃ���ł���.�v
���ň��p����Ă���̂̓j�R���̓����ł����A�t�[���G�ϊ����Ȃ���Ă���̂ŁA�܂��Ɏ��g��(�ʑ�)�ł��ˁB�u���ې}3�̌n�ɂ�����, �C���[�W�Z���T�[�̏o�͂����̋�Ԏ��g�������Ńt�[���G�ϊ���,���̈ʑ�����p���č��Ő��䂷��J���������i������Ă���.�v
�u�C���[�W�Z���T�[�ɂ��T���v�����O���ꂽ�����x���z�������Z����������@��, ���ʂ肩�m���Ă���.�v�Ƃ��鎖�ɒ��ӂ��K�v�ł��B�ȍ~�ŏq�ׂ��Ă��鉉�Z�����͈��ŁA���m�����p�I�ȑ��������\�Ȃ�A(���i������Ă���̂��͕s���ł���)�u���O�L���̂悤��(�����ɂ��)�G�b�W���o�ł�OK�̂͂��ł��B
�����X�����ʂ̋L�q���u�f�t�H�[�J�X�̌���͎��̂悤�ɍl����.��B�ɑ�, A�̑��̃T���v�����O�f�[�^�𑊑ΓI��P��f���炵�ād�v�ł��B�܂����A���Z�ɂāA��f���炵�������s���Ă���Ƃ͎v�������܂���ł����B���̃X���ʼnߋ�3����p����Ă���ȉ��̃L���m���̐����}�������Ă���Ƃ��������x����܂��ˁI
�E�I�[�g�t�H�[�J�X�̎d�g��(�L���m��)
http://web.canon.jp/Camera-muse/tech/report/2011/09/
�ȍ~�Ő�������Ă��鉉�Z�����́A�U�b�N���A�ȉ��̂悤�Ȋ������ȁH�Ǝv���܂��B
�E(�{���ł͍Ō�̕��ŏq�ׂ��Ă��܂���)�S�[�X�g�����ɂ��e������菜���ׁA�u���������U�I�����������n�C�p�X�t�B���^�[�v�ɂ�����g����������菜���B
�Ep������͈̔͂�1��f�����炵�A�ϕ��l(���ۂɂ͋���)Up�����߂�B�}8�ɁA(p,Up)���v���b�g����ƁA���ɑ�������B
�E��Ԃ́u�}8�̉��Z��, ��{�I��2�d�ϕ��ł���v�Ƃ��鎖����A(��ƍ��킹���2��ڂ�)������p����ŏ����@��p���Ă���̂ł́H�Ƒz�������B�}8�̋Ȑ��ɂ͐܂�Ԃ������邪�A2�̋Ȑ��Ƃ��Ă��ꂼ��ɍŏ����@��p���Ă���̂��A�܂�Ԃ��̉ӏ��ŏ㉺���]����1�̋Ȑ��Ƃ��čŏ����@��p���Ă���̂��͕s���B�O�҂��ƍŏ����@�̐��x�������A�����2�̋Ȑ��̌�_�����߂�K�v������B��҂��Ɛ}8��Up�̍ŏ��l��p���Ƃ̌�_�ƂȂ��Ă��Ȃ�(���A2�� AF���w���Ƀ��x�������z�����邽�߁A�I�t�Z�b�g�l���J����1�䖈�ɐݒ肳��Ă���̂����H�H�H)�B
���ǁA�u2�̑����x���z�v�̂��ꂼ����n�C�p�X�t�B���^�[�ɒʂ��A����g�����������������u2�̑����x���z�v�̍�����ϕ��A��Ԃׂ̈���ɐϕ��A�ƌ����C���[�W���ȁH�Ǝv���܂��B
> ���݂܂���A�X�|�b�N����Ȃ�������ł��ˁE�E�E�\����Ȃ��ł�
�S�ROK�ł��B�I���W�i���ւ̌h�ӂ����߂Ă�HN�ł��̂ŁB
���݂ɁAHN�̗R���Ɋւ��āA6084�������哖����̃R�����g��������A�����������v���܂����B
http://bbs.kakaku.com/bbs/-/SortID=20013676/#20017547
�����ԍ��F20083619
![]() 1�_
1�_
���̏������݂͂�����ƕʂ̘b��ł��B�\����܂���B
�����ȉ��Ɋւ��āA�������������ꂽ��A�����Ē����Ȃ��ł��傤���H���X�A�ߋ��̃X���ɂĎ��₳���Ē����A���f���c�B����ɂ��o�蒸�������K����(�͂�����)�����܂����B�������A���ƂȂ����������悤�ȕ�����Ȃ��悤�Ȋ����ŁA�����Ƀ������������܂܂ł��B
�u���t�J�����̃I�[�g�t�H�[�J�X�Z�p/ ��،��v�̐}3�ɂ́A�������}������Ă��܂��B����F5.6�ɑΉ����������Ƃ��܂��B������F5.6�݂̂Ȃ�����͂����Ɣ����ł��傤����AF5.6�t�߂̕����������������Ǝv���܂��BF5.6�Ή����C���Z���T�[��F8��������舵������(�����x�s������ʂƂ����)�\�Ǝv���܂��B�����A����F8(��p��)�Ή����C���Z���T�[��z�u�����Ƃ�����AF8�Ή����C���Z���T�[�́AF5.6�Ή����C���Z���T�[�̔z�u�𒆐S���ێ������܂܁A�����k�������z�u�ɂȂ�̂ł́H�Ƒz�����Ă��܂��B�}3�ɓ��ěƂ߂�ƁAA�AB�̌����͑Ώ̐����ێ������܂܁A�����Y�̌����ɋߕt������ł��B���̏ꍇ�A���S��ʂ�\��������F5.6�Ή����C���Z���T�[�́A�ȉ��̂悤�ɂ���AF8�Ή����C���Z���T�[�Ƃ��Ďg�p�\�Ǝv���܂��B
[F5.6�Ή���]�@����5�̑����_�p���C���Z���T�[��1�{�Ɍq�����Ă���Ƃ��A�ȉ��̂悤�ɕ�������Ă���Ƃ��܂��BA+2��B-2�̂��傤�ǒ��Ԃɒ��S������Ƃ��܂��B�T�t�B�b�N�X�̐����������������C���Z���T�[���ʑ���AF�ł̑ƂȂ�܂��B
�EA�p���C���Z���T�[�FA-2�AA-1�AA0�AA+1�AA+2
�EB�p���C���Z���T�[�FB-2�AB-1�AB0�AB+1�AB+2
[F8�Ή���]�@�{���Ȃ�����ƍׂ����P�ʂŃY����ł��傤���A���C���Z���T�[�Ƃ��ĕK�v�Ȓ������قȂ�Ǝv���܂����A�����ł�1�̑����_�������A�����k�������Ƃ��܂��B(�}�ɏ����ƕ�����Ղ��̂ł����A�Ȃ������Ē����܂��B�\����܂���)
�E�ƂȂ镪�����C���Z���T�[�́A�uA0��B-2�v�A�uA+1��B-1�v�A�uA+2��B0�v
�E�����_��5�ɂ���ׂɂ́A�����܂őz�肵�Ă��Ȃ�����A+3��B-3���K�v�ŁA���3�̗����ɁuA-1��B-3�v�A�uA+3��B+1�v�������܂��B
���S��ʂ�\��������F5.6�Ή����C���Z���T�[�Ȃ�A��L�̍l�����ő���OK�Ǝv���܂����A���͒��S��ʂ�\�������ɂȂ�F5.6�Ή����C���Z���T�[���AF8�Ή����C���Z���T�[�Ƃ��Ďg�p����ꍇ�ł��B�uF8(��p��)�Ή����C���Z���T�[�̔z�u�́AF5.6�Ή����C���Z���T�[�̔z�u�𒆐S���ێ������܂܁A�����k�������z�u�ɂȂ�v�Ƃ�����A�t�@�C���_�[�Ŏ�����鑪���_�̈ʒu���Y����Ƒz�����܂��B���̃Y�������ƂȂ郌�x���Ȃ̂��ǂ����͕�����܂��A�Y�����K����������̂ł͂Ȃ��ł��傤���H
���͂��̃Y���́A���S��ʂ�\��������F5.6�Ή����C���Z���T�[�ł����S��1�_�������A�����Ă���Ƒz�����܂��B�����A�܂��Y���Ă��t�@�C���_�[�ŕ\�������i�q��ɂ͂���܂��B���S��ʂ�\�������ɂȂ�F5.6�Ή����C���Z���T�[���ƁA�t�@�C���_�[�ŕ\�������i�q��ɂ��炠��܂���B
[1DX2�̏ꍇ]
�E���C���Z���T�[�̔z�u
http://dc.watch.impress.co.jp/img/dcw/docs/741/041/18.jpg
�E�����_
http://cweb.canon.jp/eos/lineup/1dxmk2/img/feature-aeaf/ranging-concept.gif
[�ߋ��ɗ��Ă�����X��]
�E���������_�̂݊J��F8�Ή��̎d�g�݂������ĉ�����
http://bbs.kakaku.com/bbs/K0000347675/SortID=17229252/
�����ԍ��F20083633
![]() 1�_
1�_
���~�X�^�[�E�X�R�b�v����
�������J�ȃR�����g���肪�Ƃ��������܂��B
�f�t�H�[�J�X���AAF�Z���T�[��̑��̓{�P�Ă���̂��������̂ł��ˁB���̂ق����s���g���킹�ɂ��D�s���ł���ƁB
F8�Z���T�[�ł����AF5.6�Z���T�[�ƌ��p���Ă���Ȃ�AF8�Z���T�[�̒��S�̓Z���T�[���C���̒��S�ɂ͗��Ȃ��A�ł����̂ł͂Ȃ��ł��傤���B
����œ��ɖ��͂Ȃ��悤�Ɋ������̂ł����A�ǂ��ł��傤���H
�O�X���̓��e�������s�ǂȂ̂��̂ŁA���Ⴂ��������݂܂���B
�����ԍ��F20083806
![]() 1�_
1�_
�A�i�X�`�O�}�[�g����
���X�A���肪�Ƃ��������܂��B�����ł��A�i�X�`�O�}�[�g����̂����ɗ��Ă�K���ł��B
> F8�Z���T�[�ł����AF5.6�Z���T�[�ƌ��p���Ă���Ȃ�AF8�Z���T�[�̒��S�̓Z���T�[���C���̒��S�ɂ͗��Ȃ��A�ł����̂ł͂Ȃ��ł��傤���B
> ����œ��ɖ��͂Ȃ��悤�Ɋ������̂ł����A�ǂ��ł��傤���H
�A�i�X�`�O�}�[�g�������͂�AF5.6�Ή����C���Z���T�[���AF8�Ή����C���Z���T�[�ɗ��p�����ꍇ�A(���S��1�_�ȊO)�����_���Y����Ƃ��l���Ȃ̂ł��ˁH
�J��F8�����Y���g�p����̂́A(��)�]�������Y�Ƀ��A�R���o�[�W���������Y(�G�N�X�e���_�[/�e���R���o�[�^�[)���g�p���������w�ǂ��Ǝv���܂��B�Ȃ̂ŁA����栂��ł͂���܂��A�J��F8�����Y��p�����|�[�g���[�g�B�e�ŁA�߉���̎�O���̓��ɍ��킹�������_��AF���s�����Ƃ��܂��B�������A�t�@�C���_�[�ɕ\������鑪���_�̈ʒu�����ۂ̉摜�̈ʒu�Ƃ͈�v���Ă��Ȃ��̂ŁA�_�������łȂ��A�s���g���Ⴆ���قɍ����Ă��܂����ƌ������P�[�X�����蓾��Ǝv���̂ł����A���܂���ɂ͂Ȃ�Ȃ��̂ł��傤���H(��)�]�������Y�Ƀ��A�R���o�[�W���������Y���g�p����̂́A�X�|�[�c�B�e���������Ǝv���A�I�蓙�̔�ʑ̂̓����ɂ����Ǐ]���Ă�����(�����������̑����_�ő����Ă���ł��傤����)�A�����ɂ͖�莋����Ȃ��̂�������܂���ˁB
�����ԍ��F20084217
![]() 1�_
1�_
 |
 |
 |
|---|---|---|
1DX�����Q��AF�Z���T�[ |
1DX�����Q�̑����p�^�[���} |
1DXmk2�̑����_ |
���~�X�^�[�E�X�R�b�v����
���A�l�������߂܂��BF5.6��F8�̑����_�͍��킹�Ă���Ǝv���܂��B
1DXmk2�̃��C���Z���T�[�̔z�u���݂Ă�����A�����R��͏c��F8�N���X�����Ȃ̂ɁA���E�S���F8�����_�͏c�݂̂ƂȂ��Ă��܂��B
�c�����̃��C���͂ǂ̗���Ȃ����Ă���̂ŁA�W���X�s���ʒu�͊e�������Ƃɗ��z�I�Ȕz�u�ɂ�����͂��ł��B
F5.6��F8�̌����̈ʒu�͈قȂ�܂����A���C���L���Ƃ邱�Ƃ�F8�̃I�t�Z�b�g�����J�o�[���Ă���̂ł́A�Ǝv���܂��B
�܂�AF5.6��F8�̑����ʒu���v�Z���č��킹����ƁB
������������F8�����o����悤�]�T�̂���v�Ȃ̂��Ǝv���܂��B
���E�̉����C���͕��ɗ]�T���Ȃ��A��������F8�����͒��߂��̂��ȂƐ������܂��B
�v�������Ƃ����Ə������̂œǂ݂ɂ����Ǝv���܂����A�`���ł��傤���H
�������ȓ_��������Ђ��w�E���肢���܂��B
�����ԍ��F20084257
![]() 1�_
1�_
 |
 |
|---|---|
���̐Ԃ��ӏ�(��F5.6�ȊO�͏��O)�����z�uF8��p���C���Z���T�[�z�u�v |
1DX��1DX2��AF�Z���T�[��r |
�A�i�X�`�O�}�[�g����
���̑f�p�ȋ^��ɑ��A�F�X�Ƃ��l�������A�ǂ������肪�Ƃ��������܂��B
�A�i�X�`�O�}�[�g����̋肽�����͉��ƂȂ�������܂��B�����A���C���Z���T�[�̒��������Ȃ�AF5.6�Ή���F8�Ή��ɒu������(����������)����(�����_�̈ʒu���Y����Ƃ��Ă�)�\��������܂��A�������͌������悤�ɁA�����I�ɂ͊����܂����B
���ɐi�ޑO�ɁA1DX(����AF�Z���T�[���ڂ�5D3�����l�ł�)�A1DX2�̈ʑ���AF�Ɋւ��āA�����炢���Ă����܂��B
�E1DX/5D3�͔��������́AF5.6�Ή��܂łł����B
�E1DX/5D3�̓t�@�[���E�G�A�̃A�b�v�f�[�g�ɂ��u�G�N�X�e���_�[�������A�J��F8�ɂȂ郌���Y�Œ���1�_�̃N���X�������\�B�܂��A���������_�Ƃ��̏㉺���E4�_�ŁA�̈�g��AF�����p�\�v�ƂȂ�܂����B
�E1DX2�͔�����������u�ő�61�_(���S�����_�A�����N���X21�_)��F8�Ή������\�v�ł��B1DX�Ƃ́A�u�S�����_��61�_�v�͓����ŁA�����G���A���g�債�Ă��܂��B
�ȍ~�́A�A�i�X�`�O�}�[�g����̂��l���ɃX�g���[�g�ɑΉ����܂���B�������������B
�܂��A�u����F8��p���C���Z���T�[��z�u�����Ƃ�����AF8��p���C���Z���T�[�́AF5.6�Ή�/��p���C���Z���T�[�̔z�u���A���S���ێ������܂ܑ����k�������z�u�ɂȂ�v�Ƃ̑z�����AAF�Z���T�[�����ʐ^�ɂāu�����鉻�v���Ă݂܂����B
F8��F5.6��F�l�Ƃ���1�i�قȂ�܂��Bn��0�A1�A2�A�d�An�ɑΉ�����F�l��F(n)�A�L�����a��D(n)�A�œ_������f�Ƃ���ƁA
F(n)��f/D(n)�AF(n)��2^(n/2)�@���@D(n+1)/D(n)��F(n)/F(n+1)��2^(-1/2)��1/��2
�ƂȂ�̂ŁAF5.6��p���C���Z���T�[�̔z�u��(1/��2)�{����AF8��p���C���Z���T�[�̔z�u�ƂȂ�ƍl�����܂��B
AF�Z���T�[�����ʐ^�́A(�A�b�v����2���ڂŎ����܂���)1DX��1DX2�Ƃ͖w�Ǖς��܂���B���܂���1DX�̕������C���Z���T�[���N�b�L���Ǝʂ��Ă����̂ŁA1DX��AF�Z���T�[�����ʐ^���g�p���܂����B�������A���E���̍��v3�����̃��C���Z���T�[�z�u���A���S���ێ������܂܁A(1/��2)�{�����̂��A�A�b�v����1���ڂ̉��̐Ԃ��Ȃ����ӏ��ł��BF5.6���C���Z���T�[�̔z�u���炩�Ȃ�Y���Ă��鎖��������܂��B���̐Ԃ��ӏ��Ƀ��C���Z���T�[������A�����_�̈ʒu�́A�t�@�C���_�[�ŕ\�������ʒu�ƈ�v���܂��B���������ۂɂ́AF5.6�Ή����C���Z���T�[��p�����ł�����A���ɑ����o�����Ƃ��Ă��A�����_�̈ʒu�́A�t�@�C���_�[�ŕ\�������ʒu�ƈ�v���܂���B�s���g�ɍ��킹���ς肪�قɍ����Ă��܂����݂����Ȏ��Ԃ�����������Ǝv���܂��B
�A�b�v����2���ڂ́A1DX��AF�Z���T�[��1DX2��AF�Z���T�[���r���Ղ��悤�A�傫�����قڑ��������m�ł��B1DX2��AF�Z���T�[�̔z�u��1DX�Ǝ��Ă���̂ŁA1���ڂ̐Ԃ����C���Z���T�[�Ƃ̈ʒu�Y�����z���o����悤�ɂ͌����Ȃ��Ǝv���܂��B
> ���E�̉����C���͕��ɗ]�T���Ȃ��A��������F8�����͒��߂��̂��ȂƐ������܂��B
���E�ł́AF4�Ή��c�����o(���C���Z���T�[�̌����͉������Ȃ̂ŁA1DX2�ł͉������Ƃ��\�����Ă��܂�)���z�u����Ă���̂ŁAF5.6�Ή��c�����o(1DX2�ł͉�����)��z�u����X�y�[�X������܂���B�]���āA�u��������F8�����͒��߂��v�̂ł͂Ȃ��A��������(F8�Ή������˂�)F5.6�Ή��c�����o(1DX2�ł͉�����)�����݂��Ȃ��̂ł��B�������(F8�Ή������˂�)F5.6�Ή��c�����o(1DX2�ł͉�����)��z�u����ɂ́AF4�Ή��c�����o(1DX2�ł͉�����)�ƒu�����邩�AF4�Ή��c�����o(1DX2�ł͉�����)�𒆉�����F2.8�Ή��̂悤�ɁA�ߐ����o�ɂ��铙�����Ȃ��Ǝv���܂��B
�y�L���m�����i������AF�֘A�y�[�W�z
�E1DX
http://cweb.canon.jp/eos/lineup/1dx/feature-afae.html
�E1DX2
http://cweb.canon.jp/eos/lineup/1dxmk2/feature-aeaf.html
�yAF�Z���T�[�Ƒ����p�^�[���T�O�}�z
1DX2�́u�����p�^�[���T�O�}�v�̂݁A�c�����o���������A�������o���c�����ƂȂ��Ă��܂��B1DX2�̏��i�y�[�W�ł����̉ӏ��ł́A�c�����o/�������o�ƌ����\�����g�p����Ă��܂��B
�E1DX
[AF�Z���T�[]
http://dc.watch.impress.co.jp/img/dcw/docs/516/132/013.jpg
[�����p�^�[���T�O�}]
http://dc.watch.impress.co.jp/img/dcw/docs/516/132/015.jpg
�E1DX2
[AF�Z���T�[]
http://dc.watch.impress.co.jp/img/dcw/docs/741/041/18.jpg
[�����p�^�[���T�O�}]
http://cweb.canon.jp/eos/lineup/1dxmk2/img/feature-aeaf/ranging-concept.gif
�����ԍ��F20084410
![]() 1�_
1�_
 |
|---|
�ȑO�̃X���ł́u�I�~�i���I�v�Ƃ��ĎQ�����Ă��܂���
�Ō�̕��͂�����Ƌ^���������ROM���Ă܂���
����
�����牌�ɂ܂��ꂽ�����ŏI�������ۂł�
����̋^��
>���͒��S��ʂ�\�������ɂȂ�F5.6�Ή����C���Z���T�[���AF8�Ή����C���Z���T�[�Ƃ��Ďg�p����ꍇ�ł��B
>�uF8(��p��)�Ή����C���Z���T�[�̔z�u�́AF5.6�Ή����C���Z���T�[�̔z�u�𒆐S���ێ������܂܁A
>�����k�������z�u�ɂȂ�v�Ƃ�����A�t�@�C���_�[�Ŏ�����鑪���_�̈ʒu���Y����
���o�I�Ɂu�����������������Ă���̂��ȁH�v�Ƒz�����ē�����Ȃ�
�����g�Ǝ��ۂ̑����_���Y����͈͂́uF8��Ή��v�ɂȂ��Ă���
�Ƃ������ł͂Ȃ����Ǝv���܂����E�E�E
�lj�͂����܂�Ȃ��̂ŁA�Ӑ}�����܂��ǂݎ��Ȃ��ł��܂�
�ȑO�ɓ\�����摜���Čf���܂��̂ŁA����Ő������Ă����������
���̕����܂��ꗂ����Ȃ��Ȃ�̂ł͂Ȃ����Ǝv���܂�
�ł���Ε��͂̕����K�X���s�Ɨv������Ă���������
�v�_�����ꂽ�����Ȃ��x�^�[���Ǝv���܂�
�����ԍ��F20084535
![]() 2�_
2�_
�A�n�g�E�A�n�g����
���̎��̎���X���ł́A�I�~�i���I����ɑ�ς����b�ɂȂ�܂����B�ʃX���ł��킴�킴��}���Ă������������L��������܂��B
�U�X�����b�ɂȂ��Ă��Ȃ���A���̃X���ł͑�ώ���Ȏ���\���グ�A���ɐ\����܂���ł����B�l�ԂƂ��Ă̊�̏�������Ɋ����Ă���Ƃ���ł��B
���ɂ����ɂȂ��Ă��邩������܂��A���̌��݂̍l�����́A[20084410]�Ő��������ʂ�ł��B�u����F8��p���C���Z���T�[��z�u�����Ƃ�����AF8��p���C���Z���T�[�́AF5.6�Ή�/��p���C���Z���T�[�̔z�u���A���S���ێ������܂ܑ����k�������z�u�ɂȂ�v�Ƃ̑z���́A���̎���X���ɂāA�I�~�i���I�������Ē������}(����A���߂ăA�b�v���Ē������})���A���z�̌��_�ł��B���̑z�����u�����鉻�v�����̂��A[20084410]�ɃA�b�v����1���ڂ̉��̉摜�ł��B
> �����g�Ǝ��ۂ̑����_���Y����͈͂́uF8��Ή��v�ɂȂ��Ă���
1DX/5D3�ł́A�\�������ȊO��F8�Ή��Ƃ��Ȃ������̂ŁA��ʂ�Ȃ̂ł����A1DX2�ł͑O�q�̒ʂ�A������������u�ő�61�_(���S�����_�A�����N���X21�_)��F8�Ή������\�v�ł��B
����[20084410]�ɃA�b�v����1���ڂ̉��̉摜���T�ː������Ƃ�����A1DX2�ŊJ��F8�����Y���g�p����ƁA���ۂ̑����_�̈ʒu�́A�t�@�C���_�[�ŕ\�������ʒu(AF�t���[��)�ƁA���S�������A��v���܂���B���̏ꍇ�͖{���Ȃ�A�A�n�g�E�A�n�g����悤�ɁuF8��Ή��v�Ƃ��ׂ��悤�Ɏv���܂����A1DX2�ł͂����Ȃ��Ă��܂���B�j�R���@�ł�(�ڍׂ܂Ō��Ă��܂���)F8�Ή��Ɋւ��Ă͓��l�̖���s��ł��܂��B
> �ȑO�ɓ\�����摜���Čf���܂��̂ŁA����Ő������Ă����������
> ���̕����܂��ꗂ����Ȃ��Ȃ�̂ł͂Ȃ����Ǝv���܂�
���̓_�Ɋւ��ẮA�O�q�̌J��Ԃ��ɂȂ�܂����A���̑z�����u�����鉻�v�����̂��A[20084410]�ɃA�b�v����1���ڂ̉��̉摜�ł��B
> �ł���Ε��͂̕����K�X���s�Ɨv������Ă���������
> �v�_�����ꂽ�����Ȃ��x�^�[���Ǝv���܂�
�o���邾���_�����ĂĐ������ė����ς肾�����̂ł����A�������L�ڂɂȂ��Ă����悤�ŁA�\����܂���B�Ȍ�A�C��t���܂��B
�����ԍ��F20084640
![]() 1�_
1�_
������ƃV���v���ɍl���Ă݂܂����B
�e5.6�����_���e8�ɂ��Ή����Ă���Ȃ�A���̂Q�̌����͓����Z�p���[�^�����Y��ʂ��Ă��Ă���Ɛ������܂��B
���ɂe5.6�̌������e4�`F8�̕��������Č������Ă���Ȃ�A�����Z���T�[�łe8�����o�ł��Ă������͂��ł��B
����Ȃ瑪���_�̃Z���^�[���e5.6�Ƃe8�ň�v���܂��B
�������łɋc�_���ꂽ���e�ł�����݂܂���B
�����ԍ��F20084710
![]() 1�_
1�_
 |
|---|
�C�}�C�`���ݍ��߂Ă��܂���
�u�����Ȃ�Ƒ����_�ƑɂȂ郉�C���Z���T�̌�_���Y����̂ł́H�v
�Ƃ������Ƃł����H
�E�}�͉��z�HF8�����_�Ƃ��āB
�����ԍ��F20085022
![]() 2�_
2�_
 |
|---|
��H�������H
�����ԍ��F20085055
![]() 2�_
2�_
 |
|---|
�����l���Ă���̂͂���ȃC���[�W�Ȃ̂ł����A�ǂ��ł��傤���B
�����ԍ��F20085074
![]() 1�_
1�_
 |
 |
|---|---|
�������̈�ԏ��F5.6�Ή��E������(�c�����o)���C���Z���T�[ |
F8��p���C���Z���T�[��F5.6�Ή����C���Z���T�[�Ƃ̊W |
�A�i�X�`�O�}�[�g����A�A�n�g�E�A�n�g����
���̑f�p�ȋ^��ׂ̈ɁA�F�X�l���ĉ�����A����ɂ͍�}�܂ł��Ē����A�{���ɂ��肪�Ƃ��������܂��B
�܂��A���X���x��Ă��܂������A�y�сA�ȍ~�ł̓A�i�X�`�O�}�[�g�����A�n�g�E�A�n�g����̃R�����g�ւ̒��ړI�ȉɂȂ��Ă��Ȃ��_���A���l�ђv���܂��B
�A�b�v����1���ڂ������������B����́A1DX�̑����_�̂����A�������̈�ԏ��F5.6�Ή��E������(�c�����o)���C���Z���T�[�ɒ��ڂ��܂��B���̐}���番����悤�ɁA���ڂ��Ă��鉡����(�c�����o)���C���Z���T�[�́A3�̑����_�ɑΉ����Ă��܂��B�����ł��ꂼ��̑����_���A������A-1�A0�A+1�ƕ\�����ɂ��܂��B
�A�b�v����2���ڂ������������B�O�q�̒ʂ�A��F5.6�Ή����C���Z���T�[�ɑΉ�����Ԃ����C���Z���T�[���AF8��p���C���Z���T�[�ƂȂ�܂��BF5.6�Ή��Ɠ��l�ɁA3�̑����_�ɑΉ�����ƍl����ƁAF8��p�ł́A�ua-1�Ƃ�-�P�v�A�ua0��b0�v�A�ua+1��b+1�v���ƂȂ�A3�̑����_���\�����܂��B
�������Ԃ����C���Z���T�[�̉ӏ��ɂ́A���ۂ̃��C���Z���T�[�͑��݂��Ȃ��̂ŁAF5.6�Ή����C���Z���T�[�𗘗p���鎖�ɂȂ�܂��BF5.6�Ή��̑����_(������(�c�����o)�A�c����(�������o)�́A���ꂼ��ʂƂ��Ĉ����܂�)�͑S��F8�Ή��ƍl����ƁA��������F5.6�Ή��E������(�c�����o)���C���Z���T�[�F���v7�{���A�S�ė��p���鎖�ɂȂ�܂��B�]���āA�ua-1�Ƃ�-�P�v�A�ua0��b0�v�A�ua+1��b+1�v�ɋ^���I�ɑΉ�������F5.6�Ή����C���Z���T�[�́A�uA-1��B-1�v�A�uA0��B0�v�A�uA+1��B+1�v��3�̑���\�������͂��ł��B�Ƃ��낪�AA+1��B-1�ɂ̓��C���Z���T�[������܂���̂ŁA���\���o����̂́uA0��B0�v�݂̂ł��B
��ɃA�b�v�����A1DX��1DX2��AF�Z���T�[��r�����߂Ă����ɂȂ��Ă��A�����ڂ��Ă��鉡�������C���Z���T�[�́A1DX��1DX2�Ƃő傫�ȍ��ق͔F�߂��܂���B�������A1DX2�̑����p�^�[���T�O�}�ŁA�����ڂ��Ă��鉡����(�c���o)��F8�Ή������_�́A������(�c���o)��F5.6�Ή������_�Ɠ�����3����܂��B�������傫�Ȗ��_�̈�ł��B
�E��ɃA�b�v�����A1DX��1DX2��AF�Z���T�[��r
http://bbs.kakaku.com/bbs/-/SortID=20056837/ImageID=2556327/
�E1DX2�E�����p�^�[���T�O�}
http://cweb.canon.jp/eos/lineup/1dxmk2/img/feature-aeaf/ranging-concept.gif
���Ƀt�@�C���_�[�ɕ\�������AF�t���[���ƁA���ۂ̑����_�Ƃ̈ʒu�W�ɕt���čl���܂��B
�܂��A���C���Z���T�[�̒��������Ɋւ��ẮAF8�Ή��̉ӏ��𗘗p���Ă���̂ŁA��芸�����A���Ȃ��ƍl���܂��B
���Ȃ̂́A���C���Z���T�[�̕������̃Y���ł��BF8�Ή��ł���A(���S�̉��������C���Z���T�[���琔����3�{�ڂ̃��C���Z���T�[��ɂ���)�ua0��b0�v�Ɉʒu����͂��Ȃ̂ɁA�uA0��B0�v�͂��O���Ɉʒu���Ă��܂��B���̈ʒu�ƈ�v����F8�Ή��́A���S�̉��������C���Z���T�[���琔����(���݂��Ȃ�)��4�{�ڂ̃��C���Z���T�[��ɂ���Ƒ�����̂��A�Ó��Ǝv���܂��B�܂�A�t�@�C���_�[�ɕ\�������AF�t���[�����A��1�̑����_���A�㑤�ő������Ă��鎖�ɂȂ�܂��B
���̃t�@�C���_�[�ɕ\�������AF�t���[���Ƃ̃Y���Ɋւ��ẮA��Ŏ�G�ꂽ���Ǝv���܂��B
(�����܂�)
�����ԍ��F20085587
![]() 1�_
1�_
(�����ł�)
�܂��܂��A�ƂĂ��Q�l�ɂȂ鎑�������t�����̂ŁA���Љ�܂��B�T�������|���́A�A�i�X�`�O�}�[�g���Z�p���[�^�����Y�ɒ��ڂȂ��������ł��B����ɍK�^�Ȏ��ɁA���܂���1DX�̗�Ɏ��グ�A�l�@���ė��܂����B����2�̌������[�h���K�^�������炵�܂����B
�EEOS-1Dx AF Sensor and Optics / Marianne Oelund��
https://www.dpreview.com/forums/post/54287749
�����S�̂����ɖʔ����A���N���N���Ȃ���ǂ߂�Ǝv���̂ŁA����lj������B
�����ł́A�܂��AF�l�ƃ��C���Z���T�[�Ƃ̈ʒu�W�Ɋւ��ċL�q����Ă���ӏ����o�������Ǝv���܂��B�����A�Y���ӏ������ǂ݂ɂȂ�O�ɁA�O�q�̈ȉ����v���o���ĉ������B
> F8��F5.6��F�l�Ƃ���1�i�قȂ�܂��Bn��0�A1�A2�A�d�An�ɑΉ�����F�l��F(n)�A�L�����a��D(n)�A�œ_������f�Ƃ���ƁA
>
> F(n)��f/D(n)�AF(n)��2^(n/2)�@���@D(n+1)/D(n)��F(n)/F(n+1)��2^(-1/2)��1/��2
>
> �ƂȂ�̂ŁAF5.6��p���C���Z���T�[�̔z�u��(1/��2)�{����AF8��p���C���Z���T�[�̔z�u�ƂȂ�ƍl�����܂��B
F(n)��F(m)�Ƃ̊W�ł���AF(m)�Ή����C���Z���T�[�̔z�u�́AF(n)�Ή����C���Z���T�[�̔z�u���A2^((n-m)/2)�{����A�����܂��B�d�d(��)
���̎��ɗ��ӂ��Ȃ���A�������甲���o�����A�ȉ������ǂ݉������B
�uThe detection lines for f/2.8 sensitivity need to be set about twice as far from center, as the f/5.6-sensitivity detection lines are.�v
�uIf you check dimensions carefully in this photo, you can see that the center-to-center spacing of the horizontal-line sets for the outer groups, is about 1.4x the center-to-center spacing of their vertical-line sets.�v
�����A�y���ɗy���ɒ��D�G�ȕ����A(��)�Ɠ��l�ɍl���Ă����܂��B�����A�����Œ��ӂ������̂́A���̕������y����Ă���̂��A���C���Z���T�[�̒��������Ɋւ��Ăł���_�ł��B����A�t�@�C���_�[�ɕ\�������AF�t���[���ƁA���ۂ̑����_�Ƃ̈ʒu�W�ŁA�ۗ��ɂȂ��Ă����̂́A���C���Z���T�[�̕������Ɋւ��Ăł��BF5.6�Ή���F8�Ή��Ƃł́A���C���Z���T�[�̕������Ɋւ��Ă��A�Y����������Ƃ͎v���܂����A���C���Z���T�[�ƃ����Z���T�[�Ƃ̊Ԋu�́A�J�������[�J�[�̐v�ɂ���Č��߂��Ă��܂�(���R�A��������͂���͂��ł����d)�B�]���ă��C���Z���T�[�̒��������̂悤�ɁA�ꗥ�Ɍ��܂��ł͂Ȃ��̂͊m�����Ǝv���܂��B�J��Ԃ��ɂȂ�܂����AF5.6�Ή���F8�Ή��Ƃł́A���C���Z���T�[�̕������Ɋւ��Ă��A�Y���������鎖�͂قڊm�����ƍl���Ă��܂��B
���ɁA�A�i�X�`�O�}�[�g�����ڂȂ������Z�p���[�^�����Y�Ɋւ��Ăł��B���̕��́A1DX�̃Z�p���[�^�����Y�̎ʐ^�����t�����Ȃ����������ł��B�����ŕ��シ��̂��A���Ɍ��t���Ă���D300�̃Z�p���[�^�����Y�E�}�X�N�ł��B
D300�̑����p�^�[���T�O�}���A���͌��t�����Ȃ����̂ł����AD300��AF���W�����[�V�����́AD3�Ɠ���B����ɂ�D3S��D3�̃}�C�i�[�`�F���W���낤�ƌ������ŁAD3S�̎����ɂāA����������܂��B
�ENikon D3S Optics
http://www.imaging-resource.com/PRODS/D3S/D3SA4.HTM
���̎����ɂ��ƁA�S�����_��51�_�A�N���X�����_��15�_�ł��B�S51�_���\�����ꂽ�}�̒��������A5×3�̉ӏ����N���X�����_�ł��B
���߂āAD300�̃Z�p���[�^�����Y�E�}�X�N�̐}������ƁA�m���ɒ��������̓N���X�����ɑΉ����Ă���A���E�����͉�����(�c�����o)�ɑΉ����Ă��܂��B
����D300�̃Z�p���[�^�����Y�E�}�X�N������{�ɁA���̕���1DX�̃Z�p���[�^�����Y�E�}�X�N��v�Ȃ������̂��A�����g�̂����O���������uMarianne's separator mask design for the EOS-1Dx (not patented).�v�ł��B���́A�����ŁA�ߋ��̎���X���̂��������̋^��(�o���_)�ɑ�������t���Ă��܂����I�I�I�����H�H�H
���̋L�q�Ƃ́A�ȉ��ł��B
�uOn the separator mask, the spacings between pairs of mask openings must all be exactly scaled to the size of the aperture circle on the main lens which they correspond to. Thus the openings for f/4-sensitivity are Sqrt(2) times further apart than the f/5.6-sensitivity openings, etc.�v
��͂�A�Z�p���[�^�����Y�E�}�X�N�ŁAF�l�ɑΉ��������������o���Ă���ł͂Ȃ��ł����H
���̉��̎ˏo���̐}������ƁAF5.6�ɑ�������ˏo���́AF8�ɂ��|�����Ă���̂ŁA���Ƃ��Ȃ�ł��傤���H����Ƃ��A1DX2�̃Z�p���[�^�����Y�E�}�X�N�́A1DX�̃Z�p���[�^�����Y�E�}�X�N�Ɗr�ׁAF5.6�����������AF8�������܂`��ɂȂ��Ă���̂ł��傤���H�ł���������ƁA�����̕����L���Ȃ�߂��āAF5.6��F8���������x�������Ȃ�悤�Ɏv���܂����A�ǂ��Ȃ̂ł��傤�H
�����ԍ��F20085591
![]() 1�_
1�_
 |
|---|
�X�R�b�v����̕Ԏ���҂����ɐ\����Ȃ��ł�
�l�I�����Ƃ��Ă͂���Ȋ����ł����E�E�E
�A�i�X�`�O�}�[�g����Ƃ��Ԃ�A���������Ǝv���܂�
V�AV'���c���C���Z���T�i�������o�j�E�E�E�ȉ��u��
H�AH'�������C���Z���T�i�c�����o�j�E�E�E�ȉ��g��
���g�������g�ɑ��Ďg�p����郉�C���Z���T�͈̔͂�
�����g�𒆐S�ɑɂɈʒu���A�Ώ̂ƂȂ�͈͂����g���Ȃ��i�����͒����A�����͒Z���͎g���Ȃ��j
�O���f�[�V�����g���A���ꂼ��̌��������p�ł���Z���T�͈�
�`�`����F8�`F6.3�`F5.6
�b�������F�Ԃ������g�u���v
�u���őƂ��ė��p�ł��鍕�g�̃Z���T�͈͂��u�����u�f�͂e8�܂ŃJ�o�[�ł���
����H���ŗ��p�ł���͈͂��g�����g�f�͂e5.6�͈̔͂����J�o�[�ł��Ȃ�
�܂�e�W�����Ή��Ŏg����̂͂u���ʼn������o�̂�
�b�������F�������g�u���v
�u���őƂ��ė��p�ł��鍕�g�̃Z���T�͈͂��u�����u�f�͂e8�܂ŃJ�o�[�ł���
H���ŗ��p�ł���͈͂��g�����g�f�́A�����g�u���v�̏ꍇ�ɔ�׃I�t�Z�b�g����������
�ŗ��p�ł���͈͂��e�W�܂ōL����A�����̏c���N���X��F8�����Ή��ł���
����������������ɂ���Ă��ꗂ�������������܂���
�����V���v���ɐ��������ɂ܂Ƃ߂�A�����������ł͂Ȃ����Ǝv���܂�
�v�Z���ɗ��Ƃ�����Ō������肵�Ȃ��ŁA�f���Ɍ��Ă��炦������̂ł����E�E�E
�����ԍ��F20085603
![]() 2�_
2�_
�A�n�g�E�A�n�g����
������Y��Ȑ}���A�킴�킴�A����Ē����A�ǂ������肪�Ƃ��������܂��B�A�n�g�E�A�n�g����́A���I�Z���X�ɗD��Ă��炵���̂ł��ˁB
���̃R�����g���A�x���Ȃ��đ�ϐ\����܂���ł����B�A�n�g�E�A�n�g����Ɠ���Ⴂ�ɂȂ��Ă��܂��܂������A�R�����g�����Ē����Ă���̂ŁA�����ɂȂ��ĉ������B
���C���Z���T�[�̒��������Ɋւ��ẮA�A�n�g�E�A�n�g����Ǝ��́A�萫�I�ɂ́A�����悤�ɑ����Ă���悤�Ɏv���܂��B��ʓI�ɂ́A����̃R�����g�ɂ���(��)�̊W�ɂȂ�͂��ł��B
���C���Z���T�[�̕������Ɋւ��ẮA������R�����g���܂������AF5.6��F8�ł̓Y���������Ă�ƒ萫�I�ɂ͍l���Ă��܂��B������ʓI�ɂ́A���������Y���A�J�������[�J�[�̐v����̏�������悤�Ɏv����̂ŁA���݁A�ۗ���Ԃł��B
�����ԍ��F20085697
![]() 1�_
1�_
 |
|---|
�݂Ȃ��낢��R�����g���肪�Ƃ��������܂��B
���ɂƂ��Ă����ɂȂ��Ă��܂��B
���̍l���̓A�n�g�E�A�n�g����ɋ߂��ł����A������ƈႢ�܂��B
�܂��AF8�̌�����F5.6�Ɠ����Z�p���[�^�����Y��ʂ�Ƃ����O��ɗ����܂��B
���̏�Ŋe�������f�t�H�[�J�X����ƁA�e�����͓Y�t�̐}�̂悤�Ƀ��C���Z���T�[����ړ����܂��B
�A�n�g�E�A�n�g����Ƃ������̂́A�W���X�s�����ɂ͗������̒��S�̓��C���Z���T�[�̒��S�ɂ���Ƃ������Ƃł��B
����Ȃ�[�̑����_�ł��N���X�������ł��܂��B
�����͉����Ȃ��̂ł����A�L���m���������R���F8�N���X�����ł���ƌ����Ă���ȏ�A���������\���łȂ��Ɩ����ƍl��������ł��B
�����L���m�����������܂����Ă���Ȃ�b�͕ʂȂ̂ł����B
���͂����l�����A�Ƃ��������ŁA�����܂ŗ��_�I�����͉�������܂���B
���������_��������Ђ��w�E�肢�܂��B
�����ԍ��F20086171
![]() 0�_
0�_
>���C���Z���T�[�̕������Ɋւ��ẮA������R�����g���܂������AF5.6��F8�ł̓Y���������Ă��
>�萫�I�ɂ͍l���Ă��܂��B
�����͉~��Ńo�[���N�[�w���݂����Ȃ��̂ł��傤����
�f�ʂ��`�i���C���Z���T�j�Ő������ꍇ
�O�������������̈ꕔ�A�������ׂ������̈ꕔ�ɂȂ�܂���
���������͓����ł�
�o�[���N�[�w���̔N�ւ̉~���̒����́A�����قǒZ���ł�����
F5.6��F8�ł́A�������������̒����͓����ł�
�~���ɑ��銄���͕ω����܂���
���ɉ~�������Ƃ���i���Ȃ�T�O�I�ł����j
���������Ӗ��ł͂܂��A�Y����Ƃ����̂��킩��悤�ȋC�����܂�
����F8��F5.6�̎��ŕ������Œl�ɂ��ꂪ�������Ƃ��Ă�
�ɂȂ郉�C���Z���T���ꂼ��œ��l�ɃY����킯�ł���
�����͕ω����Ȃ��킯�ł�����A���o���̂��̂ɂ͏�Q�͂Ȃ��悤�Ɏv���܂���
�����ԍ��F20086213
![]() 1�_
1�_
�A�i�X�`�O�}�[�g����
>�A�n�g�E�A�n�g����Ƃ������̂́A�W���X�s�����ɂ͗������̒��S��
>���C���Z���T�[�̒��S�ɂ���Ƃ������Ƃł��B
>����Ȃ�[�̑����_�ł��N���X�������ł��܂��B
�Ŏ��ƍ��Ŏ��̃Y���ʂ��A�e5.6���傫���e8���������̂͂��̒ʂ�ł�
�ł�����
�e8�Ή������_�E�E�E���傫���Y���@×���ׂȃY���E�E�E����\�̌��E�������
�e2.8�Ή������_�E�E�E�����ׂȃY���@×�傫���Y���E�E�E����͈͂�
�e5.6�͂��̒��Ԃł�������u���v
�ő������߂��Ⴄ�̂��u���C���Z���T�[�̒��S�v���ǂ����Ƃ��������Ǝv���܂�
�A�i�X�`�O�}�[�g�����������̂͑������C���Z���T�u�e5.6�Ή������v�̒��S�ł�
�Ȃ����Ǝv���܂��B������ɐ}�������A���g�̕����ł��ˁB
�J��F5.6�̃����Y��t�����ꍇ�́A�m����F5.6�Ή��̍��g�����̒��S��
�ƂȂ�e���C���Z���T�̌��ʂ̒��S�ɂȂ�܂��i���Ŏ��j
�ł����A���ۊJ��F8�̃����Y��t�����ꍇ�͂ǂ��ł��傤���H
F8�̌����ɂ�F5.6�͊܂݂܂���A���R���g���̉��`�ΐF�̕����̓u���b�N�A�E�g���Ă��܂��܂��B
F8�̌����̑���������̂́A�F�̕������炾���ɂȂ�܂��B
���̏ꍇ�̓Z���T���]���ł���̂͐����������ɂȂ��Ă��܂��܂�����
�����Ɓu���C���Z���T�̒��S�v�͐������̒��S�E�E�E�Ƃ������ɂȂ�܂�
�܂荇�Ŏ���F5.6��F8���u���C���Z���T�̒��S�v�Ō��ʂ������܂���
F5.6��F8�ł͎g���郉�C���Z���T�͈̔͂��ς��܂��̂�
���C���Z���T��ɂ�����u���S�v�͕ς��Ƃ������Ɏ��͗������Ă��܂�
�ǂ��ł��傤���H
�����ԍ��F20087103
![]() 1�_
1�_
���A�n�g�E�A�n�g����
�R�����g���肪�Ƃ��������܂��B
���ɊJ��F8�̃����Y�������ꍇ�i�Ƃ������F8�̃����Y�����Ă`�e���邱�Ƃ��ړI�Ȃ̂ł����j�A���̐�قǂ̌��H�}����e5.6�̌�������菜�����}�ɂȂ�ƍl���Ă��܂��B
�܂�e8�̌����̈ʒu�͂Ȃ��ς�炸�A�e8�̌������g���郉�C���Z���T�[�͈̔͂��ς��Ȃ��ƁB
�i�e�l�̓Z���T�[�ɑ�����ˊp�ɂ���������̂ŁA�ǂ�ȃ����Y�������Ă��Ă��e8�̌����̈ʒu�͕ς��Ȃ��A�ƍl���Ă��܂��j
���͂����������ɍl���Ă��܂��B
�ǂ��ł����ˁH
�����ԍ��F20087193
![]() 0�_
0�_
>�܂�e8�̌����̈ʒu�͂Ȃ��ς�炸�A�e8�̌������g���郉�C���Z���T�[�͈̔͂��ς��Ȃ��ƁB
����͂����ł���
F5.6��F8�̌����Ŏg���͈͂��Ⴄ�Ƃ���������
F8�̌����̒ʂ蓹��g���͈͂��ω�����Ƃ͎��������Ă܂����
����Ȃ蓾�܂��B
�ǂ����H������Ă����ł��傤�ˁH
�����ԍ��F20087219
![]() 1�_
1�_
���A�n�g�E�A�n�g����
�A�n�g�E�A�n�g����������F���Ȃ�ł��ˁB
�ǂ����ɐH���Ⴂ������݂����ł��B
����ł���Ύ����}���������H�}���ǂ����Ԉ���Ă���A�Ƃ������ƂɂȂ�Ǝv���̂ł����A���̂�����͂ǂ��ł��傤���B
�����ԍ��F20087232
![]() 0�_
0�_
>�����}���������H�}���ǂ����Ԉ���Ă���
�A�i�X�`�O�}�[�g���}�����ꂽ���H�}�ɑ����
F5.6�Ή��Z���T�Ȃ�ǂ��ł�F8�����ɑΉ��ł��鎖�ɂȂ�܂���
���̘_�ōs���A���[�̏c�����N���X��F8�Ή��ɂȂ��ĂȂ���
���̂��܂�����Ȃ��ł����
�l�I�ɂ�
����i��⎋�샌���Y���l���ɓ���čl�@���Ă݂Ă͂ǂ����Ǝv���܂����E�E�E
���������Y�����Ă���͎̂B�e�p�����Y�ł͂Ȃ�
����i���ʂ������샌���Y�̑��ł�
�����ԍ��F20088093
![]() 0�_
0�_
���A�n�g�E�A�n�g����
�R�����g���肪�Ƃ��������܂��B
���낢��ƕ��ɂȂ�܂��B
>���̘_�ōs���A���[�̏c�����N���X��F8�Ή��ɂȂ��ĂȂ���
>���̂��܂�����Ȃ��ł����
���[�̉����C����F4�Z���T�[�ł����A����͂e5.6/�e8�Z���T�[�Ƃ͕ʂ̃Z�p���[�^�����Y���g���Ă���̂��Ǝv���܂��B�Ȃ̂ŗ��[�ł̓N���X�������ł��Ȃ��̂��Ǝv���܂��B
>���������Y�����Ă���͎̂B�e�p�����Y�ł͂Ȃ�
>����i���ʂ������샌���Y�̑��ł�
�J�����̃����Y�͎���������Β����K�l�̂悤�ȒP�����Y�ł����藧�̂ŁA���̐}���ƍi��ɂ�����̂������Y�̒��a�Ƃ������ƂɂȂ�܂��B
�Ȃ̂œ��������Y�����Ă���͍̂i��H��ʂ����B�e�p�����Y�̌����i�̈ꕔ�j�ł����̂ł͂Ǝv���܂��B
�i���������J���������Y�ɂ���̂͊J���i��(Aperture stop)�ł����Ď���i��(Field stop)�ł͖����Ǝv���̂ł����E�E�E�j
�����ԍ��F20088264
![]() 0�_
0�_
�v��������b�̍~��o���̕����Ȃ̂ł���
���A�i�X�`�O�}�[�g����
���ʑ���AF�̈ʑ������ĉ����w���Ă���̂ł��傤���H�ʑ��̍��Ƃ������ƂȂ̂ł��傤���A���̈ʑ��Ƃ����̂�������܂���B
�j�R����
��Ə�� > �Z�p�E�����J�� > �����J���҃C���^�r���[ > �����������J���� > �t�F���[ �̐쌒 "�ǂ��ɂ��Ȃ����̂�n��������"
http://www.nikon.co.jp/profile/technology/researcher/fellow/utagawa/index2.htm
�ɂ��ƁA
�b���������������Ă����t�[���G�ϊ��̈ʑ��藝�������ꂽ�f�q���g���ƁA
�b�Y���̑傫���ƕ�������r�I�e�ՂɌ��o�ł����̂ł��B���̌������ʂ�F3AF�ɐ�������܂����B
�b���ꂪ�A���݂ł��嗬�ƂȂ��Ă���A�������i�ЂƂ݂Ԃj�Č������w�n*3��p�����ʑ������o����*4�ł��B
���G�ȐM�����t�[���G�ϊ����邱�ƂŁA�������̎��g���A�U���A�ʑ��̈قȂ鐳���g�̑g�ݍ��킹�ɕ����ł��܂��B
�����̏o��悤�ɂQ�ɐU�蕪�����Z���T�[�M���ɂ��ꂼ��t�[���G�ϊ���������A
���ꂼ��̐M�����\�����鐳���g�̎��g���A�U���A�ʑ����킩��܂��̂ŁA
���ꐳ���g�̃Z���T�[�ʑ��̍������߂āA�������������悤�Ƀ����Y���쓮����Ɨ������܂����B
�����ԍ��F20088484
![]() 0�_
0�_
kooth����A�i�X�`�O�}�[�g����
kooth���R�����g�Ȃ����Ă�����e�́A���������Ă��邩������܂��A���Ɉȉ��Ōy���G��Ă��܂��B
http://bbs.kakaku.com/bbs/-/SortID=20056837/#20083619
******************************************************************************
�ƂĂ��Q�l�ɂȂ鎑�������t���܂����B1989�N�ɃL���m���̕����������ɂȂ�ꂽ����ł��B���{���w��@�֎��ւ̊�e�Ȃ̂ŁA�f�l����̂悤�ȕ�����Ղ��ȗ������ꂽ���e�ł͂Ȃ��A���ۂɎg�p����Ă���Z�p���e���L�ڂ���Ă��܂��B����A���ǂ݂ɂȂ��ĉ������B
�E���t�J�����̃I�[�g�t�H�[�J�X�Z�p / ��،���
https://annex.jsap.or.jp/photonics/kogaku/public/18-11-kaisetsu2.pdf
�ȉ��Ɏ����C�t�����_����܂��B����s�����ɂ��ԈႢ/������X����Ǝv���܂����A���e�͒�����A�K���ł��B
(�r����)
�����X�����L�q�̈���ȉ��ł��B����قǖ��m���Ȗ��ȁA�ʑ���AF�ƃR���g���X�gAF�̊T�O���������܂œǂ����A���͂���܂���ł����B�u�ʑ��������Ƃ͂܂��Ɍ��w���̋�Ԏ��g�������̈ʑ����(�V�t�g���)��{���I�ɂ͌��m���Ă���,��r�I�Ⴂ��Ԏ��g���ɒ��ڂ��Ă���. ���̓_�͍����g�����̑���������R���g���X�g���m�����Ƃ͊�{�I�ɈقȂ�Ƃ���ł���.�v
���ň��p����Ă���̂̓j�R���̓����ł����A�t�[���G�ϊ����Ȃ���Ă���̂ŁA�܂��Ɏ��g��(�ʑ�)�ł��ˁB�u���ې}3�̌n�ɂ�����, �C���[�W�Z���T�[�̏o�͂����̋�Ԏ��g�������Ńt�[���G�ϊ���,���̈ʑ�����p���č��Ő��䂷��J���������i������Ă���.�v
******************************************************************************
���̎��A�j�R���̋Z�p�ɑ��l�����z���́A2�̃��C���Z���T�[�̏o�͂����ꂼ��t�[���G�ϊ����A���������A�ʑ����A���Ȃ킿�A�f�t�H�[�J�X�ʂ����߂���ƌ������ł��B�ȉ��̎�����(�y�[�W���̋L�ڂ�����܂���)4�y�[�W�ڂ́u���Ԑ��ځ|�ʑ��X�y�N�g���v�ɂ��鎮��ό`����ƁA
Arg{F(��)*exp(-j��a)}��Arg{F(��)}�|��a�@���@��a��Arg{F(��)}�|Arg{F(��)*exp(-j��a)}
�ƂȂ�܂��BF(��)�̓ւ̊��ł����A��L�����ł́u����̋�Ԏ��g�������v�ƋL�ڂ���Ă���̂ŁA�ւ͒萔���Ǝv���܂�(�ܘ_�A���g������/(2��))�B�]����F(��)��F(��)*exp(-j��a)�͊��ł͂Ȃ����l�ƂȂ�A������a����ʑ���a�����߂��܂��B�����A�����ł���I�I�A�ւ̓��C���Z���T�[�̉�f�s�b�`�Ɣ��W�H�ɂ���Ǝv���܂��̂ŁA������a���狗��(�ƌ������A�����̑ΐ�)�̃V�t�g(���f�t�H�[�J�X��)�����߂��܂��B
�v������A�Ԉ���Ă��邩������Ȃ��̂ŁA���܂�M���Ȃ��ʼn������ˁI
�E�t�[���G�ϊ��̐���1
https://www.yonago-k.ac.jp/denki/lab/nitta/lecture/E5_signal/note/note10.pdf
�A�i�X�`�O�}�[�g����A�A�n�g�E�A�n�g����
���ݐi�s���̃e�[�}�Ɋւ��ẮA����l�̋c�_�����Ȃ���A�v�Ē��ł��B�������̓n�b�L�������̂ŁA��͍l���邾���Ȃ̂ł����d�B�����܂łɁA���炩�̃R�����g���o�����炢���ȁA�Ǝv���Ă��܂��B�\����܂���B
�����ԍ��F20088899
![]() 1�_
1�_
���~�X�^�[�E�X�R�b�v����
�G����Ă��镔���͂������ǂ�ł��܂��B
�X���傳��́u�ʑ���AF�̈ʑ������ĉ����w���Ă���̂ł��傤���H�v�̐����Ƃ��āA
�J���������ۂɊJ����������������₷���������Ă��郁�[�J�[�����y�[�W���������̂ŁA
����̃����N�������ɓ\�����ق����A��œ��l�̋^����������l�������Ƃ��ɖ𗧂��ȂƎv��������B
�����ԍ��F20089009
![]() 1�_
1�_
kooth����
> �G����Ă��镔���͂������ǂ�ł��܂��B
>
> ����̃����N�������ɓ\�����ق����A��œ��l�̋^����������l�������Ƃ��ɖ𗧂��ȂƎv��������B
���e�ɁA�ǂ������肪�Ƃ��������܂����B
�����ԍ��F20089032
![]() 0�_
0�_
>���������J���������Y�ɂ���̂͊J���i��(Aperture stop)�ł����Ď���i��(Field stop)�ł͖����Ǝv���̂ł����E�E�E
����i��Ƃ��������������܂��������ł�����
������
���샌���Y�̌�ƃZ�p���[�^�����Y�̊ԂɎ���}�X�N������̂͂������ł����
�}�X�N�͍i��̖��������˂Ă���̂ŁA����i��ƕ\�����Ă��܂��܂���
���܂蒷�X�ƕ��͂������̂��ǂނ̂��D���ł͂Ȃ��̂ŏ���ɒZ�k���܂���
�����܂ŋc�_����Ă���̂Ō�C�ł킩�邩�Ǝv�����̂ł����A���݂܂���ł���
����ł͎�����́u����}�X�N�v�ƕ\�����܂��i���ۂɂ͍i��@�\������܂��j
�����͂��̎���}�X�N�ŕ��������A�Ƃ�������������܂�
F2.8�Ή��Z���T�ɂ�F2.8�����̍i��a�i�`��̓Z���T�`��ɂ��̂ʼn~�ł͂���܂���j
F5.6�Ή��Z���T�ɂ�F5.6�����A�Ƃ����悤�ɂȂ��Ă��܂�
�ŃZ�p���[�^�����Y�͂��̎���}�X�N�̌����Ƃɔz�u����Ă��܂��āA���̖�����
�ɂɂȂ���������邾���ł����āA����̌����������o�����̂ł͂Ȃ��ł�
�Z���T���E���Ŕz�u�Ȃ�A���̃Z���T�ɂ̓����Y�̉E�����痈��������
�E�̃Z���T�ɂ͍���ʂ�����������ʂ��悤�ɂȂ��Ă��܂�
���̂PDx2�̍��E�̃O���[�v�i20�_�j�ł����
����}�X�N�̌���
�c���C���Z���T��F5.6�����̍i�茊×�㉺�̂Q��
�����C���Z���T��F4�����̍i�茊×���E�̂Q��
�v�l�A�Z�p���[�^�����Y���S�ɂȂ邩�Ǝv���܂�
���̏���ȑz���ŁA���ۂɂ͂����ƃn�C�e�N���Ǝv���܂����E�E�E
>���[�̉����C����F4�Z���T�[�ł����A����͂e5.6/�e8�Z���T�[�Ƃ͕ʂ̃Z�p���[�^�����Y��
>�g���Ă���̂��Ǝv���܂��B�Ȃ̂ŗ��[�ł̓N���X�������ł��Ȃ��̂��Ǝv���܂��B
�ʂ̃Z�p���[�^�����Y���g���Ă�Ƃ����Ӗ��ł�
�c���C���Z���T���㉺�̃O���[�v�ŕʂ̃Z�p���[�^�����Y��p���܂���
���������̂�
�A�i�X�`�O�}�[�g����̐����ł���A�Ⴆ��F2.8�Ή��Z���T�ł����
�U�ꕝ���������ƌ��������ŁAF2.8��F4��F5.6��F8�������S�ɂ��đΏ̂ɓ����Ƃ������ł���ˁH
�ł���ΑS�_F8�Ή��ɂȂ��Ă�����ׂ��ł��傤�A�Ƃ����Ӗ��ł�
�����ԍ��F20089581
![]() 1�_
1�_
���݂܂���
�����C�Â��܂�����
�����ԍ�[20085603]�̎��̃C���X�g
F8�Ή��̐����Ƃ������́AF5.6�Ή��Ȃ̂�F8�̃����Y�ł����������̐����ł���
�������܂�
�����ԍ��F20089605
![]() 0�_
0�_
���A�n�g�E�A�n�g����
�ڂ������������肪�Ƃ��������܂��B�����ڂ����킯�ł͂Ȃ��̂Łi�Ȃ̂ł����Ŏ���ɂȂ��Ă���̂ł����j������܂��B
���U�ꕝ���������ƌ��������ŁAF2.8��F4��F5.6��F8�������S�ɂ��đΏ̂ɓ����Ƃ������ł���ˁH
��{�I�ɂ͂��������F���ł��܂��B�������A�e2.8�A����тe4�͂��ꂼ��Ɨ������Z�p���[�^�����Y�i�������͎���}�X�N�j�������Ă��āA�e5.6�ȉ��̌����̓P����đ������ł��Ȃ��A�ƍl���Ă��܂��B
�i���܂莩�M����܂���j
���X���̋c�_�̔��[�͂e5.6�Z���T�[�łe8�������ł��邩�H�Ƃ����_�������Ǝv���܂��B
���ʂɍl����e5.6�Z���T�[�ł͂e8�����̓P����đ����͂ł��Ȃ��i���̃J�����͂����Ȃ��Ă���j�Ǝv���̂ł����A�L���m���͂e8��p�̃Z���T�[�������Ă���킯�ł͂Ȃ������Ȃ̂ŁA�����l�������H�}�̂悤�ɂȂ��Ă���̂��ȂƎv��������ł��B
�i�܂葼�̃J�������E��������͈̔͂��L���j
�����ԍ��F20089809
![]() 0�_
0�_
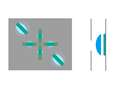 |
|---|
����}�X�N�A�Z�p���[�^�����Y�A���C���Z���T�̊W�͂���Ȋ����ɂȂ�Ǝv���܂�
�O���[������}�X�N
�����i��i������������ő傫�����Ⴄ�j
���F���Z�p���[�^�����Y
���Z���T
���̂�����̔F���͈ꏏ�ł����ˁH
�����ԍ��F20089947
![]() 1�_
1�_
 |
|---|
1�c�w�̃Z�p���[�^�����Y |
���A�n�g�E�A�n�g����
��������ȃC���[�W�ł��B
�����Z�p���[�^�����Y�̍\���͂��̂悤�ɂȂ��Ă��邩�͕�����܂���B
�i�Y�t��1D�w�̃Z�p���[�^�����Y������ƁA�\���͂����ƒP���Ɍ�����j
�����ԍ��F20089989
![]() 0�_
0�_
���̎ʐ^�̎��ł����
����͎��샌���Y�ł���
�PDx�͑����_���傫���R�O���[�v�ɂ킩��܂����
���C���~���[�̗����Ɏʂ�S�̑��́A���ꂼ��̃O���[�v�ɉ������ꏊ��
�R�̃����Y�Ō��Ă��܂�
���ꂼ��̃O���[�v���ƂɎ���}�X�N�������āA�}�X�N�̍i��ɉ����ăZ�p���[�^�����Y������܂�
�����ԍ��F20090069
![]() 1�_
1�_
���A�n�g�E�A�n�g����
�Ȃ�قǁA���Ⴂ�����Ă��܂����B
��������肪�Ƃ��������܂����B
�����ԍ��F20090079
![]() 0�_
0�_
���~�X�^�[�E�X�R�b�v����
�������莞�Ԃ��o���Ă��܂��܂������E�E�E
>�������̓n�b�L�������̂ŁA��͍l���邾���Ȃ̂ł����d�B�����܂łɁA���炩�̃R�����g���o�����炢���ȁA�Ǝv���Ă��܂��B
�����R�����g�ł������ł��傤���H���ӌ����Ђ������������ł��B
�����ԍ��F20103019
![]() 1�_
1�_
�A�i�X�`�O�}�[�g����A�A�n�g�E�A�n�g����
����l�����̑f�p�ȋ^��ɑ��A�������������ĉ�����A�l�X�ȃR�����g/�c�_�������ɂ��ĉ������Ă���̂ɁA���̏������݂��x��Ă���A��ϐ\����܂���B
> ���ݐi�s���̃e�[�}�Ɋւ��ẮA����l�̋c�_�����Ȃ���A�v�Ē��ł��B�������̓n�b�L�������̂ŁA��͍l���邾���Ȃ̂ł����d�B�����܂łɁA���炩�̃R�����g���o�����炢���ȁA�Ǝv���Ă��܂��B�\����܂���
�ƈ̂����ɏ������̂ɁA�̒����������A�W���͂��v�b�c�����Ă��܂����肵���̂ŁA���̃X���ւ̊ȒP�ȃR�����g���x�Ȃ�o������̂́A�����ł̌��ݐi�s���̃e�[�}�Ɏ��g�ވׂɁA�s���̗̑́A�C�͂Ƃ��ނ��Ă��܂��Ă���̂�����ł��B�O�q�̒ʂ�A�����͂�������ƌ����Ă���(�ƌl�I�ɂ͊����Ă���)�̂ŁA���Ƃ͍�������݂̂Ȃ̂ł����d�B
�{���ɐ\����܂���B���b���A�����Ԃ���K���ł��B
�����ԍ��F20103289
![]() 0�_
0�_
���S�҂ł��B���߂ē��e���܂��B
�\�Z10���~�ʂŃ����Y���w�����悤�Ǝv���A���m�ȃR���Z�v�g���Ȃ��̂łƂ�Ƃ߂��Ȃ��A�ȉ���3�{�Ŗ����Ă��܂��B(�o���o���ł��ˊ�)
�ESIGMA 50-100mm F1.8 DC HSM | Art (Nikon F�}�E���g)
�ESonnar T* E 24mm F1.8 ZA (Sony E�}�E���g)
�EE 10-18mm F4 OSS (Sony E�}�E���g)
���L���Ă���J�����A�����Y�͈ȉ��̒ʂ�ł��B
Nikon D7100: Sigma 18-35 F1.8 DC HSM, Sigma 50 F1.4 DG HSM
Sony ��6300: SEL35F18, SEL16F28, SEL1855
�B�e�Ώۂ͎q�ǂ��◷�s���̃X�i�b�v�������ł��B
�q�ǂ����B��Ƃ��̓|�[�g���[�g���ۂ��ʐ^���ǂ��炩�ƌ����ƍD���ł��B
�܂��AD7100 + 18-35 �̑g�ݍ��킹����ɋC�ɓ����Ă��胁�C���Ŏg�p���Ă��܂��B
�ȉ��Ɋe�����Y��Pros(�~�������R)�ACons(�����Ă��闝�R)���L�ڂ��܂��B
SIGMA 50-100mm F1.8
�E���C�ɓ����Sigma 18-35���lF1.8�ʂ��̃Y�[���Ŕ��ɋC�ɂȂ�B
�E���L���Ă��Ȃ��œ_�悩�|�[�g���[�g�ɗǂ������B
�E50mm F1.4 (���Z75mm) �ł�����ė]�����݂ŁA�g�����Ȃ��邩�s��
�E�X�y�b�N�Ɏ䂩��Ă邾���ŁA�{���ɕK�v���H
SEL24F18Z
�E18-35��50art�Ɣ�r���āASEL35F18�̎ʂ�̓V���L�b�Ƃ��Ă��Ȃ���ۂ������Ă���̂ŁAZeiss �Ȃ疞���ł��邩���H
�E�X�i�b�v�ɂ�35�����K���Ă���(���Z52mm�͎��X����������)�B�g���Ȃꂽ��p�B
�E2011�N�����Ȃ̂ŁA���̂����V�^�o���肵�Ȃ����H
�E18-35�Ɖ�p������Ă���
�EZeiss�Ƃ͂��������������Y��Sigma Art�̑傫�������Y + ���[�p�X�t�B���^�[���X�@�ɑR�ł���̂��H
SEL1018
�E���L�p�ɂ����킵�Ă݂����B
�E10-18��18-35��2��̐��͗ǂ�����(2�䎝���o���̂͑�ς����ł���)
�E�R���p�N�g
�E�L�p�ł͊W�Ȃ���������܂��AF4�Ȃ̂��C�ɂȂ�B
�E�g�����Ȃ��邩�H
�v�̓�6300��24mm�P�����Ďg���₷�����U���J�����ɂ��邩�A�g�������Ƃ̂Ȃ��œ_��ɒ��킷�邩�A�Ƃ������ƂȂ�ł����A���Ƃ͂Ƃ����A�q�ǂ�3�l�����ŁA�q�ǂ����B��Ƃ��ɉו������������t�������o���̂����\��ςŁA�R���p�N�g�ȃ�6300���w���������ǁA35mm�P�̎ʂ�ɖ����ł����A24mm�P�����Ă���F�X�ڈڂ肵�Ă��܂����Ƃ����o�܂ł���
���ۂɎg�p����Ă�������炲�ӌ�������������肪�����ł����A��ʓI�Ɏ��͂��̃����Y���ǂ��݂����ȃA�h�o�C�X���E�F���J���ł��B
���Ȃ݂ɁA�t���T�C�Y�ւ̈ڍs�͍l���Ă��܂���B
���߂�ꂸ�v���]���Ă���ȂƂ���Ɏ��₵�Ă��܂��܂����B
��낵�����肢���܂��B
![]() 0�_
0�_
�܂��A�����Y��
D7100�p�ɂ���̂�
��6300�ɂ���̂������߂�K�v������̂ł́H
����ɂ́A�����B�邽�߂ɕK�v���ł́H
D7100��50�o���g���g����Ă��Ȃ��̂ł����50�o�͕K�v���c
���̕ӂŕ����������܂��Ă��܂��H
�������܈�ԕs���ŁA����ɑ������������̂�
���e���炵��E�}�E���g�p�̃����Y���K�v�ł͂Ȃ��ł����ˁH
���L�p�́A�P���ɍ����L�p�̂��̂��ƍl����Ǝ��s���܂���B
�L�p�ɂȂ�Ȃ�قǁA�B�e�͓���Ȃ�܂��B
���̕ӂ́A�悭�l���Ă݂��ق�����낵�����ƁB
�����ԍ��F20098221
![]()
![]() 4�_
4�_
�����🐤����A�����́B
���m�ȃR���Z�v�g���Ȃ��Ȃ�{���́A�����T���ė\�Z�߂Ƃ�
�𐄏�����Ƃ���ł����A�A�A
�q���̃|�[�g���[�g����̂ƍl����ƁA�l�I�ɂ�D7100�ɁA50-100mm�͗~�����Ƃ���B
�ł�50�P�����ė]���Ă���H
��ʑ̂Ƃ̋��������܂���Ȃ��i���Ȃ��j�̂ł����ˁB
�q�������������킩��܂��A���ꂩ��c�t���Ƃ��Ȃ�A�^����̃C�x���g�ɂ����邩�Ǝv���܂��B
�������U���X�i�b�v�V���[�^�[�ɂ��������߁A24�P�Ƃ̎��ł����A
���݂̃����Y���C���i�b�v���A35�P�A18�P�A16�P�A�Ƒ����Ă��āA�X��24�P��������H
���̃����Y�ɍ��ꍞ��ŁA�u���̏œ_���������̃x�X�g�����I���͂����I��p�͑��ʼn҂��I�v
�ƁA24�P�����āA��͏����Ȃ甃�����l���邩���ł����A
���ɂ͑��̃����Y���g����ĂȂ������̂悤�Ɋ����Ă��܂��܂��B
�����āA���L�p�ł����A���̉�p�ʼn����B�肽���ł����H
�����܂��ĂȂ��ƁA���̏œ_�����͎��ė]���Ǝv���܂���B
�\�����@���̂��傫������Ă��܂�����A���ݎ����Ă���L�p�����Y�̉����Ƃ͂Ƃ炦�Ȃ������ǂ��ł��B
���ݎ����Ă��郌���Y�ŁA���������L����ꂽ�炟�I�ƌ����̂́A��{���ʼn҂��܂��傤�B
�ȏ�U�b�N���Ə������Ă��炢�܂����B
�܂��A���̊��z�Ƒ����Ă��炦��Ό��\�ł��B
�����ԍ��F20098331
![]() 1�_
1�_
�����🐤����@������
�]���n�̃����Y���Ȃ��悤�ł����@�]���n�ɋ���������̂ł�����@SIGMA 50-100mm F1.8���@Sigma 18-35 F1.8�Ƃ̌q����������Ǝv���܂��̂Ł@�ǂ��悤�Ɏv���܂��B
�����ԍ��F20098514
![]() 0�_
0�_
��okioma����
�����̃R�����g���肪�Ƃ��������܂��B
�K�v���ɉ����đI������Ƃ������ƂŁA�q�ϓI�����ɐ^�����Ȃ��ӌ��Ǝv���܂��B
�Ƃ������Ƃ�24�P������ɂȂ��ł����ˁB
���̓_�͂Ȃ�ƂȂ������ł��������Ă���Ƃ���ł͂����ł����A�|���|���V���������Y����킯�ł͂Ȃ��̂ŁA�����Ă��Ȃ��œ_����̂Ă������A���ȕ��̍������āA������Ύ�������Ȏʐ^���B���̂ł͂Ȃ����ƁA�������Ă��܂��A����ɋL�ڂ������O�_�����蓥��肪���Ȃ�����ł��B�B��
��Âɋq�ϓI�ɔ��f�ł���悤�ɂ������������ȕ��̈ӌ����f�������Ǝv���܂��B
���肪�Ƃ��������܂��B
�����ԍ��F20098548�@�X�}�[�g�t�H���T�C�g����̏�������
![]() 0�_
0�_
�����m�ȃR���Z�v�g���Ȃ�
���̂܂܃L�[�v
20���~�ɖڕW�A�b�v
�����ԍ��F20098567
![]() 3�_
3�_
���~�j���E�W���j�A����
���肪�Ƃ��������܂��B
�����ׂ��ł͂Ȃ��B���̒ʂ�ł���w
�����Ȃ�ł��B���A�w����3�l�Ȃ̂Ŕ�r�I�߂������ŎB�邱�Ƃ������̂ƁA���������Ă��P�œ_����3�l���ǂ������̔z�u�H�ɂ���^�C�~���O�������Ȃ̂�50-100���ǂ����ȂƎv��������ł��B���������ʂ�^����┭�\��̂��Ƃ��������ɂ���܂��B
���Ȃ݂�18�P�͎����Ă��Ȃ��ł��B(SEL18-55�̂��Ƃł����ˁH)
�Ȃ̂�16��35�̊Ԃ�24��lj��������Ƃ����Ƃ���ł��B
�ł��m���ɒP�œ_��������l�����̂ł��ˁB�B�B
�����ԍ��F20098579�@�X�}�[�g�t�H���T�C�g����̏�������
![]() 0�_
0�_
�������🐤����
�������掿�u���ȃ����Y�I�тȂ̂��������镶�ʂł����A�X�y�b�N�d���i�J��F�l�H���𑜓x�H�j�ŁA
�g�����Ȃ����s���ł���ƁB
����ɏ��L�����Y�̏œ_�������P�W�~������T�T�~���܂łŏI����Ă��ĎB�e�Ώۂ���ɂ��q�����
�앗�̓|�[�g���[�g���ł���ˁB
����������͎̂q���B��Ȃ̂ɁA�Ȃ�Ŗ{�i�I�Ȗ]����܂ŃJ�o�[���郌���Y�������̂��ł��ˁB
�Ō��ɂ���̂��V�O�|�Q�O�OF2.8�قǂ��d�ʂ�����T�O�|�P�O�OF1.8ART�Ȃ�ł����A�q�A��ŕp�ɂ�
�����o����̂ł��傤���H
�����V�O�}�̂P�W�|�R�TF1.8ART���g���܂����A�����{�ŏo�����鎖�͋H�ł����ɃV�O�}�P�W�|�R�O�OC
�������o�����肵�Ă��܂��B
�t�ɂP�W�|�R�O�OC��{�ŏo�����鎖�͂悭�����ł����B
�掿��{�P�ɍS��̂��y���ݕ��̈�ł����P�W�|�R�O�OC�͗l�X�ȉ�p�≓�ߊ��A���]���Ȃ�ł͂̈��k
���ʂ₨�q����̈ӎ����Ȃ��f�̕\��A����蔲���\�}�Ȃǂ��y���߂�֗��ȃ����Y���Ɗ����܂��B
�j�R�������̂P�W�|�P�S�O�ł��ǂ��̂ł����A���̎�̃����Y���������ق������ǂ��u�Ԃ��L�^���Ղ�
�̂͊ԈႢ�Ȃ��Ǝv���܂���B
�܂��A�������ʂ̈�ʓI�Ȃ��E�߂͂�����ł͂Ȃ����Ƃ������܂��B
�����ԍ��F20098596
![]()
![]() 1�_
1�_
�����🐤����
���ԐM���肪�Ƃ��������܂��B
�����A�^����┭�\����l����̂ł����
���A�ړI�̂Ȃ��܂܂��A
�����ɕK�v�ƂȂ郌���Y���w���A
�܂��͂��̂��߂̎����߂Ă������ق�����낵�����ƁB
���Ȃ�
�Ⴆ�Ή^�����2��̐����l��
�j�R���p��70-200F2.8��70-300�A80-400������
���p�ŕW���Y�[���Ȃǂ̍w�����l���܂��ˁB
�����ԍ��F20098623
![]() 1�_
1�_
�����🐤�����́B
�T�O���� �e�P�D�S�����ė]���C���Ƃ̂��ƂŁA�]���̂T�O�|�P�O�O���� �e�P�D�W�̓p�X�B�����A�]�����K�v�ɂȂ����������r���[���Ǝv���܂��B���̏ꍇ�Aokioma�������Ă��ꂽ�V�O�|�Q�O�O���� �e�Q�D�W�ӂ�̕����掿�ƑΉ��͈͂̍L���ŃI�X�X���ł��B
�d �Q�S���� �e�P�D�W�͎g�p�p�x���X�O�����郌�x���Ȃ�A�����Ǝv���܂��B
�l�I�ɃI�X�X���͂d �P�O�|�P�W���� �n�r�r�ł��ˁB
����ł��q����ɐڋ߂��Č����낷�\�}�⑫���t�߂���������\�}�͖ʔ�����ɑ��̃����Y�ł͎B��Ȃ��ʐ^�ɂȂ�Ǝv���܂��B���U�R�O�O�̃`���g�t����������Ǝv���܂����A���s��Ŕw�i����ꂽ�L�O�ʐ^�ɂ��͂������Ȃ����Ǝv���܂��B
�����ԍ��F20098824
![]() 0�_
0�_
�����ƃ��{�}�� �Q����
�����Ȃ�ł���ˁB
D7100�̃����Y�\���I�ɂ�50-100���ǂ������Ȃ�ł���ˁB
18-35���C�ɓ����Ă���Č����̂��|�C���g�������ł��B
�����ԍ��F20098880
![]() 0�_
0�_
���ɂ��ɂ�kamera����
�����Ȃ�ł��B�����ׂ��ł͂Ȃ���������܂����(��)
�������S�҂Ȃ�ŁA���������܂��Ă�20���̍��z�����Y�͔��������ɂ���܂���(��)10�����炢��2�{�ɂ��Ă����ł��B�B�B
�����ԍ��F20098887
![]() 0�_
0�_
MOUNT CONVERTER MC-11 CANON EF-E �\�j�[�p
http://kakaku.com/item/K0000858178/
�Ђ���Ƃ�����L���m��EF�ƃ\�j�[E��2��̐����x�^�[�����B
�����炭�]���p�Y�����y����ł��������B(^^�U
�����ԍ��F20098979
![]() 1�_
1�_
������甒������
�R�����g���肪�Ƃ��������܂��B
���������ʂ�g��������l�����獂�{���Y�[���Ȃ�ł��傤�ˁB
���߂Ĕ����������Y�������J������Sony NEX-5��������ł����A���̃L�b�g�����Y��18-55�̎ʂ�ɂȂ�ƂȂ������ł���(�Ȃ�ƂȂ��ł��B�{�P�Ȃ̂��A�𑜊��Ȃ̂��A�Â��Ƃ���Ŋ��x���オ�肪���Ȃ̂��A�����ł��悭������܂���)�A���̌�ɔ������P�œ_��sigma art���C���̎ʂ�Ɋ������A����ȗ����a�̑傫�ȃ����Y�ɖڂ��s�������ł��B�H�킸�����݂����Ȃ���ł��ˊ�
�ł�18-140�͍l�������Ƃ��Ȃ������̂Œ��ׂĂ݂܂��I
���肪�Ƃ��������܂����B
�����ԍ��F20099009
![]() 0�_
0�_
�����́`
�\�j�[���[�U�[�Ȃ̂�E�}�E���g�̕��̂��b�������ĉ������ˁB24mm��35mm�̗������L���Ă܂����A�B���ďo�����Ɖ掿��F���͑f�l�ڂł���24mm�̕����ǂ��悤�Ɏv���܂��B�l�I�Ȋ��z�ł������ƂŃp�\�R���Ō�������Ȃ炻���܂ŋC�ɂ��Ȃ��ėǂ��Ƃ��v���郌�x���ł���^^�œ_�������d��������ǂ��Ǝv���܂��B
�q���ƈꏏ���ƃ��t�@�����o���́A�悢�������܂���ˁ`���̓�77���L���Ă܂������������ă�6000�ɂ��܂����B�������q���B��̃��C���̓�5100+20mm or 35mm�ɂȂ�܂�����^^;�ꏏ�ɗV�тȂ���B��ƂȂ�Ə����ł����̗ǂ��̂��d�����Ă��܂��B���B�_�ɏ悹�Ĉꏏ�Ɋ���䊊���ĎB�����肵�Ă܂�^^�����Y���}�������K�v�Ȃ��̂Ȃ珬�����{�̔����̂���̑I�������ȂƂ��v���܂��B������Ƙb���E�����Ă��܂������܂���^^;
�����ԍ��F20099044�@�X�}�[�g�t�H���T�C�g����̏�������
![]()
![]() 1�_
1�_
DX�p�ɏ�����10�`24��16�`80�ƃ^��������16�`300PZD��150�`600�����C���Ŏg���Ă���܂��B�ǂ̋�����lj��łق����������߂�Ɠ������o�₷���ł���I
�����ԍ��F20099046�@�X�}�[�g�t�H���T�C�g����̏�������
![]() 1�_
1�_
��okioma����
70-200�����ł����B�Ƃ������A50-100���ڂɗ��܂�܂ł͂��Ȃ�C�ɂȂ��Ă܂����B
�����炭�^����Ȃ���200�ł�����Ȃ����炢�Ȃ�ł��傤���A�����ăt���T�C�Y�@���Ǝg���₷���œ_��Ȃ낤�Ȃ��Ɛ��������ł����AAPS ���Ƃǂ��Ȃ̂��ȂƋC�ɂȂ�܂��āB�B�B
D7100�͂���Ȃɍ����x�����Ȃ��̂ŁAF1.8�����͂Ȃ̂ƁA1.3�N���b�v�܂Ŏg�p�����75-200�ɂȂ�̂�APS�ł�70-200�I�ʒu�t���̃����Y�Ȃ̂��ȁH�Ǝv���Ă���������ɂ��Ă��܂����B
���Ȃ��Ȃ��̓c�Ɏ҂���
���肪�Ƃ��������܂��B
�����Ȃ�ł��B16mm�ł̘��Ղ�����Ă̎ʐ^���������ʔ����̂ƁA���s��ł��������L�p�ŎB�肽���Ǝv�����Ƃ������̂����R�ł��B
�]���[��18�Ƃ܂��p�[�X�����߂��Ȃ��悪�g����̂��ǂ��ł��ˁB
�����ԍ��F20099075
![]() 0�_
0�_
���ɂ��ɂ�kamera����
MC-11�I
�j�R���ł���������Ȃ��ƕ����Ă���قǎc�O�Ɏv�������Ƃ͂���܂���B
���ꂳ������Ȃɂ��������ƂȂ��AMC-11��50-100���w�����ďI���Ȃ�ł����ǂ�(��)
Commlite �̃A�_�v�^�[���C�ɂȂ�܂����A�����x��MC-11�̕����������ł��ˁB
�����ԍ��F20099081
![]() 0�_
0�_
��Matador386����
24, 35�����g�p����Ă���̃R�����g�Ƃ������ƂŁA��ώQ�l�ɂȂ�܂��B���肪�Ƃ��������܂��B
24�̕����{���炢�l�i����̂ŁA�啪�Ⴄ�̂��Ɗ��҂��Ă�����ł��������܂łł͂Ȃ���ł��ˁB�B�B
�œ_�����Ƃ����ϓ_���炢���ƁA18-35�ŎB�����ʐ^�����Ԃ���20�~�����傢�̂��̂������̂�24������Ȃ�ł��傤�ˁB
�����ԍ��F20099143
![]() 0�_
0�_
���j�R���c������
�ǂ�ȏœ_�����ɂ��Ή��ł��ėǂ����ȍ\���ł��ˁI
�����ĊF�����{�͍��{���Y�[�����������Ȃ�ł��傤�ˁB
���Ƃ��̏�ŗ~�����Ǝv�������̂��Ă��܂������ŏI�I�ȍ\������������ƍl���Ă����������ǂ������ł��ˁB
�����ԍ��F20099146
![]() 0�_
0�_
�F�l�R�����g�A�A�h�o�C�X���肪�Ƃ��������܂����B
�F�l�̃R�����g��q�ǂ���ƁA50�P���g�����Ȃ��Ă��Ȃ��̂ŁA���܂芩�߂͂��Ȃ�����ʓI�ɂ͖]����I������ׂ��Ƃ̈�ۂ��܂����B
�B�e��ʈȊO�Ɏ��̘r�̖�肪�傫���̂��Ǝv���܂����A�~�߂����]���̕��ɋ������X���܂����B
�K���F�l����j�R��������18-300����邱�Ƃ��o�������Ȃ̂ŁA�Ώۂ̏œ_��̎ʂ��g������Ȃǎ������Ƃ��o�������ł��̂ŁA���̏��50-100��70-200, ���邢�͍��{���Y�[���Ȃǂ�I���������Ǝv���܂��B
�C�}�C�`�̏ꍇ��10-18�ɒ��킵�Ă݂悤���ȂƁB
Good �A���T�[��
�ŏ��ɃR�����g��������A70-200���Ă��Ă���������okioma����A���{���Y�[��������Ă�������������甒������A24�P��35�Ƃ̔�r�������Ă���������Matador386����ɂ����Ǝv���܂��B
�����ԍ��F20101739
![]() 2�_
2�_
http://news.kakaku.com/prdnews/cd=camera/ctcd=1050/id=58272/?lid=myp_notice_prdnews
http://dc.watch.impress.co.jp/docs/news/1012413.html
�L���b�V���o�b�N�̃L�����y�[������܂����ˁH
�����烌���Y�������悤���ȁ`
![]() 4�_
4�_
���̂����̊����ɂ�������ɂ����͂����A�����ɂ���B
����5�N�ȏ�ACB�ɓ�����Ȃ����ǁB���ł�������Ȃ������������ȁB
�����ԍ��F20071257
![]() 1�_
1�_
���߂łƂ��������܂��_(^o^)�^
�����ԍ��F20071351�@�X�}�[�g�t�H���T�C�g����̏�������
![]() 3�_
3�_
���������ꂽ�ؘR�������
����ɂ��́B
���̓���20�{���炢�͉䂪�Ƃɂ���܂��ˁB
�j�R���l�ɂ��z�{�𐔕S���~�g���Ă܂���CB���L�����y�[�����S����������܂���
�~�����A�~���������L�����y�[�����i�Ȃ̓��t�I�N�œ��肵�Ă܂�����i�劾�j
�����ԍ��F20071389�@�X�}�[�g�t�H���T�C�g����̏�������
![]()
![]() 2�_
2�_
������l�b�g����A���̓L���b�V���o�b�N�Ń����Y���w�����Ă܂��B
�v���ڂ�������܂���
�����ԍ��F20071916
![]() 1�_
1�_
�����l�E������
���肪�Ƃ��������܂��O�O�G
�����ԍ��F20071917
![]() 1�_
1�_
����819����
�����́A���z�{�̊z���܂�ňႢ�܂��B
�����ƃj�R���l�ɂ��z�{�o����悤�Ɋ撣��܂�����
�����ԍ��F20071923
![]() 2�_
2�_
���͑S���v�����Ă܂���c( ; �K�D�K)
�����ԍ��F20071944�@�X�}�[�g�t�H���T�C�g����̏�������
![]() 2�_
2�_
�����S���v�����Ă܂���c( ; �K�D�K)
�����ԍ��F20071976
![]() 1�_
1�_
 |
|---|
������Ƃ͍v�����Ă܂���w
�����ԍ��F20072047�@�X�}�[�g�t�H���T�C�g����̏�������
![]()
![]() 4�_
4�_
�ŁA�܂����X(^_^)/
����܂�!!!
�����n�߂܂��傤!!!
�����n�߂܂�p(^-^)q
�����ԍ��F20072071�@�X�}�[�g�t�H���T�C�g����̏�������
![]() 3�_
3�_
�������ꂽ�ؘR�������
���������Y���A�ΏۂɂȂ����炦�����ǂȁB
�����ԍ��F20072703�@�X�}�[�g�t�H���T�C�g����̏�������
![]() 1�_
1�_
�����l�E������
������v�����Ă��������ˁ`
�����ԍ��F20073645
![]() 0�_
0�_
�����l�R������
��̐l�H���ꂩ�甃���Ηǂ������ł��O�O�G
�����ԍ��F20073647
![]() 0�_
0�_
������������������������
���肪�Ƃ��������܂��A�ΏۂɂȂ��Ă����炭���������ɂ���܂�����
�����ԍ��F20073648
![]() 0�_
0�_
��Green�B����
������̂��߂ɂ��j�R�����������ł����H
�����ԍ��F20073655
![]() 1�_
1�_
http://s.kakaku.com/item/K0000858050/
������
����~�������( ��_��)�U
�����ԍ��F20074466�@�X�}�[�g�t�H���T�C�g����̏�������
![]()
![]() 1�_
1�_
������
�߲�(ɁM��´)� ��
�������߂�ƺ��Ȃ̂ŋ����Ă�������m(__)m
�����ԍ��F20074499
![]() 0�_
0�_
�����l�E������
DL18-50 f/1.8-2.8�ǂ��ł���ˁA�����Ă��������O�O�G
���ɂ͎g�����Ȃ��Ȃ��̂ł�낵�����肢���܂��B
�����ԍ��F20077521
![]() 0�_
0�_
�����l�R������
���������߂�ƺ��Ȃ̂ŋ����Ă�������m(__)m
�����܂���A���Ȃ����j�R��ɂȂ��Ă���������
�����ԍ��F20077523
![]() 0�_
0�_
�}�C�N���t�H�[�T�[�Y�̒��L�p�����Y�̍w�����������Ă��܂��B
O-MD���g�p���Ă���̂�M.ZD7-14�ɂ��悤���Ǝv���܂������o�ڋ��Ȃ̂��l�b�N�ŁA
PROMINAR 8.5�����ɍl���Ă��܂����A������̓t�[�h�Ƀt�B���^�[��t����̂��s�ւ����Ɋ����Č��߂��˂Ă��܂��B
�p�i��7-14�ƃR�V�i��10.5�͑S�����Ƃ��čl���Ă��܂���B
M.ZD7-14��PROMINAR 8.5�ł�����ǂ���̕������g���₷���ł��傤���H
�����ԍ��F20056093�@�X�}�[�g�t�H���T�C�g����̏�������
![]() 0�_
0�_
�t�B���^�[�����Ȃ�7-14
�ʓ|���������Ƃ͏o����8.5
���������t�B���^�[������l�Ȃ̂��A
���Ă����Ȃ��Ă��ǂ���ł��Ȑl�Ȃ̂��B
���ꂪ�����ȋC�����܂��B
���Ȃ݂�8.5�̓t�[�h�ł͂Ȃ��{�̑��ɕt���鎖���o���܂���B
�i�a��67���������ȁH�j
�����ԍ��F20056184�@�X�}�[�g�t�H���T�C�g����̏�������
![]() 1�_
1�_
�v���~�i�[�͕��i�Ƃ����z�������Ԃ������ĎB�e����ړI�ɍ����������Y�ł��B
�����������p�r�ł�MF�����₷�������L���ł����A
�v���~�i�[�͘c�Ȃ��قږ������Ȃ�D�G�Ȍ��w�v�̃����Y�ł��B
7-14mm�̓Y�[�����o����AF���g����֗���������̂ŁA
�p�r�ɂ���Ďg���₷���͕ς���Ă��邩�Ǝv���܂��B
�����ԍ��F20056197
![]() 1�_
1�_
���_�˂̖�i����
�ԐM���肪�Ƃ��������܂�
�����Y�Ƀt�B���^�[�t������̂ł����I
���Ȃ݂ɂ��̏�ԂŃt�[�h�͕t���̂ł��傤���H
�����ԍ��F20056222�@�X�}�[�g�t�H���T�C�g����̏�������
![]() 1�_
1�_
��gohst_in_the_cat����
�ԐM���肪�Ƃ��������܂�
�ړI�͕��i�ŁA�J���������������̂͋x���̎��Ԃ�������������̂Ń}�j���A���ł��悢���ȂƂ͎v���܂��B
M.ZD7-14�������Ȃ��Ǝv���܂����A�o�ڋ��g�������ƂȂ��̂ŏ����t���Ȃ����C�ɂȂ�܂�
�����ԍ��F20056236�@�X�}�[�g�t�H���T�C�g����̏�������
![]() 0�_
0�_
���o�ڋ��g�������ƂȂ��̂ŏ����t���Ȃ����C�ɂȂ�܂�
���L�p�����Y�̈�ԑO�ɂ��郌���Y�́A
�����t���Ă�������p�͂����������Ȃ���ۂł����E�E�E�B
�t�[�h�𒅗p���Ă���ނ���t�B���^�[�͕s�v�ł��B
(�Ƃ������A�t�Ƀt�B���^�[�͎ז�)
���ړI�͕��i
���Z��17mm�̉�p�݂̂ŏ����ł���Ȃ�v���~�i�[�������߂ł��B
���̃����Y��m4/3�@�ł������킦�Ȃ����ʂȑ��݂ł�����B
(7-14mm��m4/3�łȂ��Ă����̃}�E���g�ł���ւ͉\)
�����ԍ��F20056275
![]() 3�_
3�_
������������
>> �ړI�͕��i
>> �J���������������̂͋x���̎��Ԃ������������
������Ƃ������i�B�e�ł��ƁA�O�r�ɍڂ��či����i���ĎB�e����̂ŁA
����a�����Y�܂ŕK�v�Ȃ��Ǝv���܂��B
�uM.ZUIKO DIGITAL ED 9-18mm F4.0-5.6�v
����_���Ȃ́H
�����ԍ��F20056582
![]() 1�_
1�_
������������
>> �o�ڋ��Ȃ̂��l�b�N
C-PL�t�B���^�[��ND�t�B���^�[�Ȃǂ��g���\�肪�Ȃ��̂ł�����A�u�o�ڋ��v�ł����Ȃ����Ǝv���܂��B
�����ԍ��F20056598
![]() 1�_
1�_
�L�p��̂Ȃ�714�Y�[���B
��{�A�Y�[���ł�������Ԃ��������܂��B
�L�p���肫��Ȃ�v���~�i�[�B
�Ԃ��͂����܂��AC-PL��e��ND�Ȃǃt�B���^�[�a�𑵂��Ďg�����߂܂��B
�������A��ʑ̂����ō\�}���҂���c���O��ɂȂ�܂���ˁB
��{�A�e�œ_��ɃN�Z��ʔ���������A�����O��ɑ��ō\�}���҂��ׂ��Ȃ�ł����c�ړ��X�y�[�X�ɐ���������P�[�X�����X����܂��B
����Ȏ��̓Y�[���Œ����ł��郁���b�g���傫���ł���o(^o^)o
�l��M.ZD914���������Ă͂����ł����A918���R���p�N�g�Ŏʂ���\���Ńt�B���^�[���[�N�ł����ɁA�C��R�Ȃǂŋt���B�e�����葾�z����ꍞ�肷��̂Łc�����葱���Ă܂��B
�����ԍ��F20056644�@�X�}�[�g�t�H���T�C�g����̏�������
![]() 1�_
1�_
����LUMIX�Ƀp�i7-14���g���Ă܂��I
����Ȃ�A7-14��I�т܂��ˁI
�����i���D���ł��� AF���ǂ��ł�����cf(^_^;
�����ԍ��F20056687�@�X�}�[�g�t�H���T�C�g����̏�������
![]() 4�_
4�_
���p�i��7-14�ƃR�V�i��10.5�͑S�����Ƃ��čl���Ă��܂���B
�p�i�����Ă܂��B�Ȃ��A�O���̂��C�ɂȂ�܂��B�ߋ��X���ɁAEM5?�ŋ���ȃS�[�X�g���o�Ă�̂�����܂������A�l�I�ɂ͌o������܂���B
�킽���͕ی�t�B���^�[��ΓU�߂����l�ԂȂ̂ŁA����Ƃ�����Ƃ��͎g���Ă݂�܂ŐS�z�ł������A�B�e�������t�^�����悤�ɂ���A�ĊO�A����Ȃ����̂ł��B
�����ԍ��F20056810�@�X�}�[�g�t�H���T�C�g����̏�������
![]() 0�_
0�_
����������
�������Y�Ƀt�B���^�[�t������̂ł����I
�����Ȃ݂ɂ��̏�ԂŃt�[�h�͕t���̂ł��傤���H
�����Y�Ƀt�B���^�[�͕t�����܂��B
���̏�ԂŃt�[�h�͕t�����܂��B
�������A�t�B���^�[�̗L���ƊW�Ȃ��Ƃ���Ńt�[�h�̕t���O����
�o����o���Ȃ�������܂��B�������܂ߐF�X�����܂��ˁB
�܂��A
�E�u�����Y�{�̂ɓ����L���b�v������ԁv�ɂ̓t�[�h�̕t���O�����o���܂���B
�@�L���b�v�ƃt�[�h���͂��Ɋ����t���O�����o���Ȃ��̂ł��B
�@�t�[�h�̕t���O���ɂ͈�[�L���b�v���O���Ȃ��Ƃ����܂���B
�E���݂ɁA�t�[�h�̋t�������t���͏o���܂��i�w�����̍����Ԃ�����ł����ˁj
�@���̍ۂ̕t���O���̏����͑O���Ɠ����ł��B
���悢��t�B���^�[�̂��Ƃł����A
�E���߂Ăł����A
�@�u�����Y�{�̂Ƀt�B���^�[������ԁv�Ńt�[�h�̕t���O���͏o���܂��B
�@�u�����Y�{�� + �t�B���^�[ + �L���b�v�v�ł̓t�[�h�̕t���O���͏o���܂���B
�E�����Y�{�̂ɕt����t�B���^�[�a��67mm�ł��B
�E�P�����͂���܂���B�������t�B���^�[�Q���d�˂̓P�����܂��B
�E�t�B���^�[�̑����Ɋւ��āB�t�B���^�[�̃l�W�s�b�`�ɑ������Y�{�̂�
�@�l�W�s�b�`�������ɈႤ�ׁA�X���[�X�ɉ��ނƂ��������ł͂���܂���B
�@�u����H�Ȃ������...�H�v�Ƃ����悤�Ȋ����ʼn��܂��B
�E���މ�]�p�x�͂�������300�x�ʂʼn����E�ł��B
�@������300�x�ʂ̉��݂Ŏ��Ȃ��̂��H�͑S����肠��܂���B
�@�����Ƀs�b�`���Ⴄ���䂦�ɂނ��낵�����葕������܂��B
�E����ND�ȂǕt������O�����肷��ꍇ�̒��ӓ_�ł����A���G�ɁA�����ǂ��A
�@�����݉߂���ƃl�W�R���i�X�o�J�ɂȂ��Ă����Ă��܂��̂�
�@�D�����Ȃ��炪�R�c�ł��B
�E���܂���Ȃ��̂͑O�ʂɂԂ��邩��ł͂Ȃ����A�Ƃ����R�����g���ǂ�����
�@�ǂ݂܂������A�����ł͂���܂���B
�E�L���b�v�̎����u�����L���b�v�v�Ƃ����ď������̂́A������������Ⴄ�L���b�v
�@�Ȃ�Ί������t�[�h�̕t���O�����o����̂ł͂Ȃ����Ǝv���Ă��܂��B
�@�����Ă͂��Ȃ��̂łȂ�Ƃ������܂��B
�@
�����ԍ��F20057282
![]()
![]() 1�_
1�_
����������
�ˁHPROMINAR 8.5mm���Ă߂�ǂ������ł���H��
�ł������炱���������킭���Ă�������Ȑl�������ł��B
�����ɁB
�܂��߂�ǂ�����������Ă͔̂�����k�B
�ʂ肪�ϑԂȂ̂ň������킢�Ă��܂��B
��������PROMINAR���Ă��Ƃł��傤���ˁB
�����ԍ��F20057305
![]() 0�_
0�_
�ԐM�x���Ȃ��Ă��܂��Ă��݂܂���I
gohst_in_the_cat����
�������Ă�������p�����قǂ�����Ȃ��Ƃ������Ƃł����A�����Ȃ��������Ȃ̂ŋɗ͏����t���Ȃ��悤�ɂ������̂ŁA�t�B���^�[��t������������ł����ז��ł��傤���H
������@������������
9-18��I�Ȃ��������R�́A���C���͋x���ɓ��A��ōs����͈͂ł̕��i�B�e�Ȃ̂ł���
�A�����������L�p���w������Ȃ�N�ɐ��s�֍s���̂ŗ��s��Ő�����i���B�e����Ƃ��ɂ��g�p�������̂ŏ����ł����邢�����Y���Ǝv���܂����B
���i�e������
�L�p��̂Ȃ�7-14�A�L�p���肫��Ȃ�v���~�i�[�ł����A�������l�����Ȃ��猟�����Ă݂悤�Ǝv���܂��I
9-18���R���p�N�g�Ŏg���₷�����ł���ˁB
���l�E������
�������������i���D���Ȃ̂ŁA�o�ڋ��łȂ����7-14�ő����������Ǝv���܂��B
�����͂���7-14�ɌX���Ă���C�����܂����A���������Y�łȂ��̂ŔY�݂܂���(´�_�`)
����ɐႪ�~��������
�����ł��L���Ė��邢�����Y���~�����̂ƁA�S�[�X�g�̌����C�ɂȂ����̂Ńp�i�͊O���܂����B
�����ی�t�B���^�[�t�������̂ł����A�p�i���Ȃ疾�邳�Ńv���~�i�[��I�Ԃ��Ȃ��H�Ƃ��������ł��B
�_�˂̖�i����
�v���~�i�[�ɂ��ĕߑ����Ē������肪�Ƃ��������܂��I
�v���~�i�[�̎d�l�����܂����������Ă��܂���ł������A�_�˂̖�i����̐����ł���Ɨ����ł��܂����A���肪�Ƃ��������܂��I
�����ԍ��F20058031�@�X�}�[�g�t�H���T�C�g����̏�������
![]() 1�_
1�_
������������
>> �R�V�i��10.5�͑S�����Ƃ��čl���Ă��܂���
�m�N�g��10.5 F0.95�łȂ��ł��傤���H
�t�B���^�[�a�́A72mm�ɂȂ��Ă��܂����ǁA���ɂ���Ȃ����R�͂���̂ł��傤���H
�����ԍ��F20058071
![]() 0�_
0�_
�p�i7-14mm���ƁA(������������)���S�[�X�g���K���o�܂���B�I�X�X�����܂���B�l�b�g�Ō������Ă݂ĉ������B
�p�i�{�f�B�Ȃ�o�Ȃ��̂ł����E�E�B
�����ԍ��F20058329�@�X�}�[�g�t�H���T�C�g����̏�������
![]() 0�_
0�_
���t�B���^�[��t������������ł����ז��ł��傤���H
���h�~�݂̖̂ړI�̃t�B���^�[�g�p�̏ꍇ�ł����A
�����Y���L�p��ɂȂ���A�`�ʂɑ���e���͂��傫���Ȃ�܂��B
�W���ȏ�̉�p�Ȃ�t�B���^�[��t���Ă����܂���͋N���Ȃ���������܂��A
�t�B���^�[�͕`�ʂɎז��ȗv�f�ł��邱�Ƃɂ͕ς�肠��܂���B
�Ȃ̂ŁA�L�p��Ƀt�B���^�[�͈�ʓI�ɂ͎ד��ł���ז��A�Ƃ����킯�ł��B
���Ɋւ��Ă̓t�[�h���L��Α��͖h���܂��B
�����͍L�p�����Y�͂ǂ����{�͕ی�t�B���^�[�͎g�p���Ȃ��ł��B
(ND�t�B���^�[�Ƃ��͗p�r�ɂ���Ă͎g���܂����ی�ړI�ł͂Ȃ�)
�܂��A���i���̏ꍇ�AMF�����₷�������Y�̕����B�e������܂���B
�����ԍ��F20058382
![]() 1�_
1�_
��������@������������
�m�N�g����f0.95�͖��͓I�ł����A��p��10.5�ł��̂ł��������L�p�ȃ����Y�Ŋ�����߂ƍl���č����2���ɍi��܂����B
�����ԍ��F20058493�@�X�}�[�g�t�H���T�C�g����̏�������
![]() 0�_
0�_
���ɂ�`�� mark2����
�p�i��7-14�͍w�����悤�Ƃ͍l���Ă��Ȃ��ł���A�S�[�X�g�o�Ȃ��ꍇ������悤�ł����A�ߏ�Ō����������X�܂��Ȃ��̂Ŗ`���͂��܂���(^^;
�����ԍ��F20058513�@�X�}�[�g�t�H���T�C�g����̏�������
![]() 0�_
0�_
��gohst_in_the_cat����
�t�B���^�[�ɂ��Ă͂悭������܂����A���肪�Ƃ��������܂��B
�ǂ��烌���Y���ߏ�Ō�������舵���Ă���X�܂��Ȃ��̂ŐG���Ĕ�r���邱�Ƃ��ł��Ȃ��̂ł����A7-14�ɂ�MF�N���b�`������܂����ǃv���~�i�[�Ɣ�ׂĂǂ���̕���MF���₷���̂ł��傤���H
�����ԍ��F20058567�@�X�}�[�g�t�H���T�C�g����̏�������
![]() 1�_
1�_
������������
�Ŋ��Ƀ��h�o�V�Ƃ��Ȃ��̂ł��傤���H
���h�o�V�͌��\�n���ɂ�����̂ŁA��x�����^��A�m�F���ꂽ�����������Ǝv���܂��B
�����ԍ��F20058622
![]() 0�_
0�_
��������@������������
�����ł��ˁA�Ŋ��̃��h�o�V�⓯���̕i�����̓X�܂֍s���ċA���ė��邾����9���Ԃ�����܂��B
���������߂���Β��ڌ��ɍs���̂ł����A��{�I�ɘA�x�����Ȃ��d���Ȃ̂łȂ��Ȃ�����ł��B
�����ԍ��F20058911�@�X�}�[�g�t�H���T�C�g����̏�������
![]() 0�_
0�_
�����o�ڂ��C������ł������A�g���n�߂�Ƃ��܂�C�ɂȂ�Ȃ��Ȃ�܂����I
�t�[�h������܂��̂Ŗ��Ȃ��ł����A�g�p���ĂȂ����͕K���L���b�v����悤�ɂ��Ă܂��I
7-14�s���܂��傤�c(o^-')b !
�����ԍ��F20058929�@�X�}�[�g�t�H���T�C�g����̏�������
![]()
![]() 1�_
1�_
��{�I�ɂǂ�AF�����Y��MF��p�����Y���MF�͂���ł��B
AF�̕p�x���Ⴂ�Ȃ�MF��p�����Y�̕���MF�̑��쐫�͗ǂ��ł��B
(�Ⴆ�L�p�ȊO���ƃ|�g����p��85mm�����Y��MF�̕����g���₷���Ƃ�)
�܂��A�����̃Y�[�������Y�̓\�t�g�I�Ɍ��w�������X���ɂ���܂��B
(����͂ǂ̃��[�J�[�ł���͓̂����X��)
�{���Ȃ�v���~�i�[�̂悤�Ƀ����Y�̕��O��Ƃ��Ȃ������Y�̕����]�܂����ł��B
7-14mm�͕֗����̑���ɂ��̂悤�ȃf�����b�g���L��܂��B
�v���~�i�[�͕s�ւ��̑���ɂ��̂悤�ȃ����b�g���L��܂��B
(�v���~�i�[�̂悤�ȕ`�ʂ����郌���Y�͑��}�E���g�ł����܂葶�݂��Ȃ�)
�ǂ����I�����邩�́A�D�݂̖�肩�Ǝv���܂��B
�����ԍ��F20058977
![]() 0�_
0�_
�p�i7-14mm���g���Ă܂��B�ŏ��̓t�B���^�[�����Ȃ��̂ɕs���ł������A���͊���܂����B
���Ȃ��ł��B
�܂��A�����̓I�����p�X��7-14mm���g���Ă����̂ł����A�傫�����Č��ɂȂ��ăp�i�ɔ��������܂����B���ʂ������������Ă��܂��B�p�i�̂��ƂĂ��������ē������ɔ�����9-18mm�͈�x���g���ĂȂ��̂Ŕ���ɏo�����Ƃ��Ă܂��B
�����ԍ��F20059467
![]() 0�_
0�_
���l�E������Agohst_in_the_cat����
�A���ɂ��Ă��݂܂���B
������̃R�����g�ł����ԗh���Ԃ��܂���(^^;
�܂��ǂ���ɂ��邩�i��Ă��܂��A������̃X���b�h�ŊF���狳���Ē��������Ƃ����Č��߂悤�Ǝv���܂��I
gngn����
�p�i7-14�̃R���p�N�g���͖��͓I�ł���ˁB
�f���炵�������Y�Ȃ̂͏d�X���m�ŋC�ɂȂ�Ȃ���ł͂Ȃ��ł����A����͍L���Ɩ��邳�ɏd�_��u���Č������Ă���̂Ńp�i�͌��ɋ����Ȃ������̂ł�(>_<)
�����ԍ��F20061139�@�X�}�[�g�t�H���T�C�g����̏�������
![]() 0�_
0�_
�������������F�l���肪�Ƃ��������܂����I
���ꂼ��̒����ƒZ�����悭������܂����̂ŁA���ꂩ��ǂ���ɂ��邩��������l�������Ǝv���܂��B
�����ԍ��F20061152�@�X�}�[�g�t�H���T�C�g����̏�������
![]() 0�_
0�_

�N�`�R�~�f������
�œK�Ȑ��i�I�т��T�|�[�g�I
[�����Y]
�V���s�b�N�A�b�v���X�g
-
�y�~�������̃��X�g�z�������̂ς�����
-
�y�~�������̃��X�g�zPC�\��20251031
-
�y�~�������̃��X�g�z���C��PC�č\��
-
�yMy�R���N�V�����z����\��
-
�y�~�������̃��X�g�zpc�P�[�X
���i.com�}�K�W��
���ڃg�s�b�N�X
- �m�[�g�p�\�R����������9�I�I �p�r�ʂ̃R�X�p�ŋ����f���y2025�N10���z

�m�[�g�p�\�R��
- �p�i�\�j�b�N �u���[���C���R�[�_�[�̂�������5�I�I ���S�Ҍ����̑I�ѕ�������y2025�N10���z

�u���[���C�EDVD���R�[�_�[
- �r���[�J�[�h �X�^���_�[�h��JRE CARD�̈Ⴂ�͉��H ��ׂĂ킩�����u���܂��g�����v

�N���W�b�g�J�[�h
�i�J�����j
�����Y
�i�ŋ�10�N�ȓ��̔����E�o�^�j




