LUMIX DMC-G3 �{�f�B

���i���̓o�^������܂��� ���i���ڃO���t
���C�ɓ��萻�i�ɓo�^����ƁA���i���f�ڂ��ꂽ���Ƀ��[����My�y�[�W�ł��m�点�������܂�
����
�ň����i(�ō�)�F
¥12,700 (2���i)
- �t�������Y
-
- �{�f�B
- �_�u���Y�[���L�b�g
- �����Y�L�b�g

�^�C�v : �~���[���X ��f���F1668����f(����f)/1600����f(�L����f) �B���f�q�F�t�H�[�T�[�Y/4/3�^/LiveMOS �d�ʁF336g
![]()

-
- �f�W�^�����J���� -��
- �~���[���X��� -��

LUMIX DMC-G3 �{�f�B �̌�ɔ������ꂽ���i

�ň����i(�ō�)�F ¥-�@�������F2012�N 9��13��
�{�y�[�W�ł͌f�ڂ���EC�T�C�g��[�J�[������w�����тȂǂɊ�Â��Ď萔������̂��Ă��܂��B

LUMIX DMC-G3 �{�f�B�p�i�\�j�b�N
�ň����i(�ō�)�F���i���̓o�^������܂��� [�G�X�v���u���b�N] �������F2011�N 7�� 8��
�f�W�^�����J���� > �p�i�\�j�b�N > LUMIX DMC-G3 �{�f�B
http://www.dxomark.com/index.php/Cameras/Camera-Sensor-Ratings/%28type%29/usecase_landscape
���̃T�C�g������ƁAG3�̃_�C�i�~�b�N�����W�����܂����ł����A
��͂肻���Ȃ̂ł��傤���H
�����ԍ��F13840587
![]() 0�_
0�_
���̃T�C�g�̕\��jpg�ŏ����ݒ�ł̎B���ďo���̌��ʂł��̂ŋɒ[�Șb���܂肠�Ăɂ͂Ȃ�܂����
�Ⴆ�j�R�����ɏグ���RAW�ŎB�e�����ꍇ���|�I�ɂ�D3�̂ق���D90���_�C�i�~�b�N�����W���L���ł���
���̕\����D3�̂ق����Ⴂ�l�ɂɂȂ��Ă��܂�
�܂�������Ƃ����Q�l���x�ɍl�����ق����ǂ��ł���
�����ԍ��F13840668
![]() 8�_
8�_
�I�����p�X�d-5�Ɠ����x�̂悤�ł��ˁH
�����ԍ��F13840777
![]() 1�_
1�_
�L�q��H����Ɉ�[�B
�����ԍ��F13840815
![]() 1�_
1�_
�L�q��H����ɂ���1�[��
�����ԍ��F13841229
![]() 1�_
1�_
 |
 |
|---|---|
�c3���E�c90��r |
�f3�lj���r |
�����̃T�C�g�̕\��jpg�ŏ����ݒ�ł̎B���ďo���̌��ʂł��̂ŋɒ[�Șb���܂肠�Ăɂ͂Ȃ�܂����
�@���̃T�C�g��RAW�ł̔�r�Ȃ̂�Jpeg���V�r�A�ł���B����ɂ��̃T�C�g�����ĂɂȂ�Ȃ��̂Ȃ�A�ǂ̃T�C�g�Ȃ瓖�ĂɂȂ�̂ł��傤���H
�ꕔ�̃f�[�^�����̂��Ȃ����{�̃T�C�g���S�R�M���ł���T�C�g���Ǝv���܂����B
���Ⴆ�j�R�����ɏグ���RAW�ŎB�e�����ꍇ���|�I�ɂ�D3�̂ق���D90���_�C�i�~�b�N�����W���L���ł������̕\����D3�̂ق����Ⴂ�l�ɂɂȂ��Ă��܂�
�������킩���Ă��Ȃ������ł��B
DXOmark��D3����D90�̃_�C�i�~�b�N�����W�̔�r���f�ڂ��܂����\��ǂ����Ă��������B
��{���x��ISO150�O��Ń_�C�i�~�b�N�����W�̃s�[�N�����Ă��Ċ�{���x�ł͎D90�������Ă��܂���ISO300�����肩��ISO�������Ȃ��D3���̃_�C�i�~�b�N�����W��ꡂ��ɏ����Ă��܂��B
SN�����e�_�C�i�~�b�N�����W�ɔ�Ⴗ��̂�ISO300�ȏ��ꡂ���D3���̕����]�T������Ƃ������Ƃł��B�@��̓����𐳊m�Ɍ����Ă���Ǝv���܂����ǂ��ł��傤���H
�قƂ�ǂ̃T�C�g�̃_�C�i�~�b�N�����W�͊�{���x���ኴ�x�̔�r�����ڂ��Ă��Ȃ��̂�DXOmark���炢��������Ƃs�d�r�s���Ă���T�C�g�͏��Ȃ��Ǝv���܂��B
�����x�̓m�C�Y�����������̂ŃR�����g�͂��܂��ADXOmark�̃_�C�i�~�b�N�����W�̐��l�͂��Ȃ�M���ł�����̂��Ǝv���܂���B
�����_�C�i�~�b�N�����W�̍L���̉��b��RAW��������l�łȂ��ƗL���݂͂킩��Ȃ��ł��傤�ˁB
�����ԍ��F13842344
![]() 12�_
12�_
>��{���x��ISO150�O��Ń_�C�i�~�b�N�����W�̃s�[�N�����Ă��Ċ�{���x�ł͎D90�����>���Ă��܂���ISO300�����肩��ISO�������Ȃ��D3���̃_�C�i�~�b�N�����W��ꡂ��ɏ����Ă��܂��B
>SN�����e�_�C�i�~�b�N�����W�ɔ�Ⴗ��̂�ISO300�ȏ��ꡂ���D3���̕����]�T������Ƃ�>
>�����Ƃł��B�@��̓����𐳊m�Ɍ����Ă���Ǝv���܂����ǂ��ł��傤���H
�M�����Ȃ��̂ł����D3��D90�����̃O���t�̗l�ȓ����_�C�i�~�b�N�����W�ɂȂ�iso320�Ńe�X�g���邱�Ƃ��I�X�X�����܂�
�f�[�^�ƌ������ǂ�قLjႤ��������Ǝv���܂���
���ǂ̃T�C�g�Ȃ瓖�ĂɂȂ�̂ł��傤���H
�T�C�g���G���Ȃǃ��f�B�A�̏�����{���ĂɂȂ�܂���A���ɐV���i���o��������̏��قǂ��ĂɂȂ�܂���
�܂����[�J�[�̕����܂肠�ĂɂȂ�܂���
�M������͎̂��ێ������g�ŏ����W�߂ĉ����𗧂ĂĂ���������i�e�X�g�j���ĂȂ������ۂ�������炭�g���Ă݂Č��ʂ�������Ǝv���܂�
���̒��R��Ԉ���������ł�����܂�����E�E�E�E�E�E�E�E
�Ƃ͂������̌��s�̃J�����A�Z���T�[�T�C�Y���炭��摜�i�掿�j�̈Ⴂ�͂����Ă��ǂ��I��ł���薳�����x���܂ŗ��Ă���Ǝv���܂��i�R���f�W�͖������Ă���Ƃ͎v�����E�E�E�j
�����ԍ��F13842389
![]() 7�_
7�_
���M�����Ȃ��̂ł����D3��D90�����̃O���t�̗l�ȓ����_�C�i�~�b�N�����W�ɂȂ�iso320�Ńe�X�g���邱�Ƃ��I�X�X�����܂�
�f�[�^�ƌ������ǂ�قLjႤ��������Ǝv���܂���
���͗��@�Ƃ������Ă��܂���̂Ō�����ɂ͎��ۂ�TEST���Ă���������ł��傤�����L�q��H ���f�[�^�����o���ɂȂ��Ă��������B
���Ȃ݂�Jpeg�̊�{���x�ł����o���ĂȂ��̂Ŏ��͂��܂�Q�l�ɂ͂��Ă��Ȃ�GANREF�ł�D90��D3���̃_�C�i�~�b�N�����W�́BDXOmark�Ɠ����悤�ȌX���ł��ˁB
D3��
http://ganref.jp/items/camera/nikon/1492/capability/dynamic_range
D90
http://ganref.jp/items/camera/nikon/13/capability/dynamic_range
���M������͎̂��ێ������g�ŏ����W�߂ĉ����𗧂ĂĂ���������i�e�X�g�j���ĂȂ������ۂ�������炭�g���Ă݂Č��ʂ�������Ǝv���܂�
�܂��ꕔ���͎^�����܂����A���Ȃ��͂ł���̂�������܂��A����قƂ�ǂ̍w���҂͔�r�������@��������������A���炭�g���Ă݂Ĕ�r����Ȃ�Ď����ł��Ȃ����炢���Ȕ�r�T�C�g���Q�l�ɂ���킯�ł���B
�X���傳�����������@��̃_�C�i�~�b�N�����W�̋������C�ɂȂ��ăX�����Ă��Ă���Ǝv���܂��̂ŁADXOmark��ے肷�邾���̍�������������������Ηǂ��̂ł͂Ȃ��ł��傤���H
��jpg�ŏ����ݒ�ł̎B���ďo���̌��ʂł��̂�
���̎g���Ă���|��\�t�g���Ԉ���Ă��Ȃ���ADXOmark�̃T�C�g�̓Z���T�[�iRAW�j�ł̔�r�����Ă���T�C�g���Ǝ��͔F�����Ă���̂ł�����L�̍����͂ǂ��ɂ���̂ł��傤���H
���Ȃ݂Ɏ��̓Z���T�[�̗D�ǂ��̂����̌����Ă���킯����Ȃ���DXOmark�̃X�R�A��ő�_�C�i�~�b�N�����W�̐��l�݂̂����ăC���`�L���Ƃ��M�p�Ȃ�Ȃ��Ə����Ă���������̌f���ł悭��������̂ŋ^���悵���܂łł��B
���̃T�C�g�͓��ĂɂȂ�Ȃ��Ƃ������ƂŃX���傳�[���ł���̂Ȃ玄�͂���ȏ㉽���������Ƃ͗L��܂���B
�����ԍ��F13842501
![]() 13�_
13�_
���͂悤�������܂��B
�i�Ⴂ�Ƃ��͂��̂悤�ȃe�X�g�ɂ͔��ɋ���������܂������A�ŋ߂͂��܂�C�ɂ��Ȃ��Ȃ����̂ŁADxO Lab.�@���ǂ̂悤�ȕ��@�ŕ]�����Ă��邩�m�F���Ă���܂���̂ŁA��ʘ_�ł��b�����邱�Ƃ����������������B�j
�J�����̃_�C�i�~�b�N�����W��]������ɂ́A���炩�̏o�̓f�o�C�X�i���j�^�[�ŕ]������Ƃ��v�����g�A�E�g���ĕ]������Ƃ��j���K�v�ɂȂ�܂��B���R���̏o�̓f�o�C�X�ɂ̓_�C�i�~�b�N�����W�����݂���킯�ŁA���͈͓̔��ł̕]���ɂȂ�킯�ł��B
�Ȃ��ANIKON��D3���������ꂽ�����A�ǂ����̃T�C�g�ŁA�Â��Ԃꂽ�Ƃ���▾�邭���ł��܂����Ƃ��납��AdobePS�i�������ƋL�����Ă��܂����B���ł��j�ŋ��ٓI�ɊK�������o�����Ƃ����悤�ȕ��������悤�Ɏv���܂��B
����ł͉��̂��̂悤�Ȍ���ꂽ�_�C�i�~�b�N�����W�̂Ȃ��ŁA�J�����̃_�C�i�~�b�N�����W�ɍ����o�Ă���̂��H
�ʓ|�Ȃ̂ŁA�J�������g�̎��_�C�i�~�b�N�����W�����ɑ傫���ē����ł���ƍl���Ă����܂��B
�E�悸�A�ʏ�̖��邳�̕����i���͌��ƎB���f�q�̋L�^�������I�ȊW�ɂ���Ƃ���;�@�����ɂ͎B���f�q�̋L�^�Əo�̓f�o�C�X�̖��Â������I�ȊW�ɂ���Ƃ���j�������l���Ă݂܂��傤�B
�i�ȉ��A�����ł͂Ȃ��ł����A���o�I�ɂ͖��Ȃ����x�ɏ����܂��j
���邳���PEV���邭�Ȃ����Ƃ��ɏo�̓f�o�C�X�ցA�Q�{�̖��邳�ŕ\����������̃J������1.5�{�̖��邳�ŕ\������J�������������Ƃ��܂��ƁA�O�҂͓��R�̂��ƂƂ��đ����o�̓f�o�C�X�̃_�C�i�~�b�N�����W���E�ɒB����̂ŃJ�����̃_�C�i�~�b�N�����W�������Ȃ�܂��B
�@�܂�A�R���g���X�g�̍����摜���o�͂���J�����̓_�C�i�~�b�N�����W�������Ȃ�X���ɂȂ�܂��B
�E���ɁA�����I�ɕω����Ȃ������ɂ��Ăł����A
�o�̓f�o�C�X�̗����E�i�܂�Â��Ƃ���Ɩ��邢�Ƃ���j�̋߂��ŐQ�Ă���Ɓi���邳���傫���ω����Ă��A�����������̕ω��f�����Ȃ��Ɓj�A�_�C�i�~�b�N�����W�͂ǂ�ǂ�L����܂��i���̂���薾���ł̔����������Ȃ�j�B
��������̖͂��邳�̕ω��ɑ��Ăr����J�[�u�̓����B
�@�����ɂ���̗��Ƃ���������A���̂r����J�[�u���o�̓f�o�C�X�̃_�C�i�~�b�N�����W�O�ŋN���Ă���A����ł̓_�C�i�~�b�N�����W���������ƂɂȂ�܂��B
���X�r���c�_�ł������̂悤�Ȋ����ł��B
�]���ł̓J�����̔\�͂�\���Ă��镔�������邱�Ƃ͊m���ł����A�o�̓f�o�C�X�̃_�C�i�~�b�N�����W�͈͓��ł̕]���ł��邱�Ƃ��m���ł��B
Raw��Jpg�̌��ʂ��Ή����Ă���ꍇ�́A���炭�_�C�i�~�b�N�����W�̏����ȕ��̓R���g���X�g�����߂ɏo�͂���J�����ł͂Ȃ����Ǝv���܂��B
�����ԍ��F13842633
![]() 4�_
4�_
>�J�����̃_�C�i�~�b�N�����W��]������ɂ́A
>���炩�̏o�̓f�o�C�X�i���j�^�[�ŕ]������Ƃ��v�����g�A�E�g���ĕ]������Ƃ��j
>���K�v�ɂȂ�܂��B
>���R���̏o�̓f�o�C�X�ɂ̓_�C�i�~�b�N�����W�����݂���킯�ŁA
>���͈͓̔��ł̕]���ɂȂ�킯�ł��B
���̐l�f�W�J���̃_�C�i�~�b�N�����W�ɂ��ĉ��������ĂȂ���
>�܂�A�R���g���X�g�̍����摜���o�͂���J�����̓_�C�i�~�b�N�����W�������Ȃ�X���ɂȂ�܂��B
���̈ꕶ�Ŋm��ł���(��)
�����ԍ��F13844148
![]() 3�_
3�_
�����X����B
��
���̏������������̂��AF300EXR�̃t���b�V���͏�Ɂi������@�̕��͓lj�\�͂��Ȃ��̂��͂悭�킩��܂��A
�f�W�J���̃_�C�i�~�b�N�����W�ɂ��Ă͈ꌾ�������Ă��Ȃ��Ǝv���܂��B
�ʐ^�̃_�C�i�~�b�N�����W�̕]�����@�ɂ��ăR�����g���������ł��B
�����ԍ��F13844380
![]() 1�_
1�_
�����̐l�f�W�J���̃_�C�i�~�b�N�����W�ɂ��ĉ��������ĂȂ���
�����ĉ�����
�����ԍ��F13845681
![]() 0�_
0�_
>�f�W�J���̃_�C�i�~�b�N�����W�ɂ��Ă͈ꌾ�������Ă��Ȃ��Ǝv���܂��B
>�ʐ^�̃_�C�i�~�b�N�����W�̕]�����@�ɂ��ăR�����g���������ł��B
�f�W�J�����t�B�����J�����������ł��B
�o�͂͒P�Ȃ�\����ł���ǂ�����`���܂ł����\���ł��܂���B
���͈̔͂ɓ��̓_�C�i�~�b�N�����W���ǂ��}�b�s���O���邩�̘b�ł��B
���Õ��̈��k�ƌ����Ă���̂�����ɓ�����܂��B
�����o��(�v�����gor�f�B�X�v���C)���낤�����̓_�C�i�~�b�N�����W�̍��͂����ɔ��f����܂��B
�����ł������Ă܂���ˁH
�uD3�ňÂ��Ԃꂽ�Ƃ���▾�邭���ł��܂����Ƃ��납���~�������o�����v
���ꂪ�_�C�i�~�b�N�����W�̍��ł���B
G3�Ƃ̍��͂����ł��B
���ꂪ�_�C�i�~�b�N�����W�ł��B
�R���g���X�g�������Ⴂ�͒P�Ȃ�S���J�[�u�̌X����ł���
�_�C�i�~�b�N�����W�Ƃ͒��ڊW�L��܂���B
���ۂɃt�B�����ʐ^��f�W�J���ŎB�e��ɋÂ�������������������o���̂���l�Ȃ炾��ł������ł���ȒP�Ȏ��ł���B
�����ԍ��F13845865
![]() 5�_
5�_
>IHopeSlowLife����
����G3�����ċ��܂������̃J�����͗ǂ��J�����ł���B
�_�C�i�~�b�N�����W�͊m���ɋ����ł����ǂ��ꂪ����l�͖w�Nj��܂���B
��ł������܂������Ǒ��͈��k����Ă���̂Œʏ�ł͍����킩��ɂ����̂ł��B
�������f�W�J���͂ǂ���_�C�i�~�b�N�����W�������̂Ŋe�Ђ��ꂪ�킩��Â炢�o�͂����Ă��܂��B
�Ȃ������ʐl�ɂ͔���Ȃ����E�ł��B
�t���T�C�Y���Ɣ�ׂĐ��l�I�ɂ͋����ł����ǖڂ����@�����ł��B
���Ƃ��ƃt�B�����ɂ���ׂ�Λ��݂����ȋ����ł��B
�C�ɂ����f�W�J�����y���݂܂��傤�B
G3�͋C�y�Ŋy���߂�J�����ł��B
�����ԍ��F13845909
![]() 5�_
5�_
������x���������X���炢�����܂��B
F300EXR�̃t���b�V���͏�Ɂi������
���炵���u�ߗL���������܂��B
����ȏ�ӌ�����������͖̂��ʂ̂悤�ł��̂ŁA����ɂĎ��炢�����܂��B
�Ō�Ɉ�����Ȃ��Ȃ����A
F300EXR�̃t���b�V���͏�Ɂi������@�̒��ŁA�u���v�Ɓu���v����`�ł��Ă��܂���B���̈Ӗ����킩��ɂȂ�ł��傤���B
�q���g�́@S���J�[�u�̏c���ƁA�����ł��B�Ƃ����Ă����̃q���g�ňӖ������킩��ɂȂ�悤�ł�����A����̂悤�ȃ��X�͂���Ȃ��Ǝv���܂��̂ŁA���킩��ɂȂ�Ȃ��Ƃ����C�͂��Ă���܂��B
�����ԍ��F13846060
![]() 1�_
1�_
>�u���v�Ɓu���v����`�ł��Ă��܂���B���̈Ӗ����킩��ɂȂ�ł��傤���B
�\�z�ʂ�̕ԓ����肪�Ƃ��������܂��B
����́A�I�[�f�B�I���̏o�̓_�C�i�~�b�N�����W�̘b��
�ʐ^�̏��ʂƂ��Ẵ_�C�i�~�b�N�����W���p��ō������Ă�����̓T�^�I�ȍl�����ł��B
���R���������b�ɂ����Ĕ��ƍ��Ȃɒ�`�͕s�v�ł��B
����炪�ւ���Ă���̂͏o�͂̃R���g���X�g��ł���A
�ʐ^�������ʂƂ��Ẵ_�C�i�~�b�N�����W�ł͂���܂���B
�o�͂ɂ������Βl�I�_�C�i�~�b�N�����W(�\������\)�Ƃ͑S���ʕ��Ȃ̂ł��B
����炵���P����|���I�ɏ��o���ɂ��ăM�������[�ɕ��͋C�ŃA�s�[���������͔̂���܂����A
���̕��͂���߂ɉ����ԈႢ������Η��_�I�ɂǂ������_���Ă��������B
�����ԍ��F13846580
![]() 7�_
7�_
>���̃T�C�g������ƁAG3�̃_�C�i�~�b�N�����W�����܂����ł����A
�����ł��ˁB
G3�̔���́A�_�C�i�~�b�N�����W�ł͖����̂ŁA�d������܂���B
�F�X�Ƙ_�c����Ă܂����d�B
�EGK7����Ɂ@1�[��
�Eseresci����͌�����Ă��镔��������Ǝv���܂�
�ł��B
seresci����
>�܂�A�R���g���X�g�̍����摜���o�͂���J�����̓_�C�i�~�b�N�����W�������Ȃ�X���ɂȂ�܂��B
>�ʐ^�̃_�C�i�~�b�N�����W�̕]�����@�ɂ��ăR�����g���������ł��B
���̉��߂��ƁA�R���g���X�g�̒Ⴂ�摜���o�͂���J�����̓_�C�i�~�b�N�����W(DR)���L�����ƂɂȂ��Ă��܂��܂��B����ȃo�J��!!
seresci������Ă��镔���́A�ʐ^��o�̘͂b�ł͂Ȃ��A���͒l�̘b�ł��B
�ʐ^�E�摜�́A�o�͋@���DR�ɍ��킹�ē��͒l���g�[���}�b�s���O���Ă̏o�͂ł�����A
DR�̋����J�������ADR�̍L���J�����̎ʐ^�̕����R���g���X�g�͍��������₷���Ȃ�܂��B
�n�C�_�C�i�~�b�N�����W�Z�p�Ő������ꂽ�摜�������ɂȂ������Ƃ͂���܂����H�R���g���X�g�Ⴂ�ł����H
�����ԍ��F13846884
![]() 8�_
8�_
DXO mark�͐M�����Ă��܂��B�������A�J�����͑������\�Ȃ̂ŁA�����Ŕ��\����Ă��鐔�l
�����ŃJ�����̕]���͂ł��Ȃ��Ɗ����Ă��܂��B
��ʓI�ɂ́A�Z���T�[��1�s�N�Z�����Ƃ̑傫�����_�C�i�~�b�N�����W�ɊW���Ă���̂���
�l���Ă��܂��B�ł��̂ŁA�傫�ȃZ���T�[�T�C�Y�ʼn𑜓x�̒Ⴂ���̂��L���ł��B���A����
���ׂĂ݂�ƁA�����ł��Ȃ��Ƃ��낪�ʔ����ł��B�\�j�[�̃Z���T�[���g�����j�R�����D�G
�ł��ˁB�\�j�[�����D�G�ȂƂ��������ƁA1�s�N�Z���̃T�C�Y�ȊO�ɂ��A�_�C�i�~�b�N
�����W�ɉe����^����v�f������̂��낤�Ǝv���܂��B
�}�C�N���t�H�[�T�[�Y�́A1�s�N�Z�����Ƃ̑傫�����������̂ŁA�ǂ����Ă��_�C�i�~�b�N�����W
�ł͕s�����Ǝv���܂��B�������AG3�́A�}�C�N���t�H�[�T�[�Y�Q�̒��ł͗D�G�Ȃق��ŁA�𑜓x
�̒Ⴂ�I�����p�XEP-3�����D�G�Ȃ̂́AAD converter�ȍ~�̏����ɂ��e������v�f������
�̂��낤�Ǝv���܂��B
�ŋ߂̃J�����ɂ́A�_�C�i�~�b�N�����W���\�t�g�I�ɍL����@�\�͂���܂����A�ኴ�x�̃m�C�Y��
�������Ă��܂��P�[�X�������āA��ؓ�ł͂����Ȃ��Ɗ����Ă��܂��B
��{�Ƃ��ẮARAW�ŎB�e���āA�B�e���e�ɍ��킹�āA�����Œ��ߌ������邵���Ȃ��ƍl���Ă�
�܂��B�J�����܂����ŁA�����̗~�����G��������Ƃ͍l���Ȃ������ǂ��Ǝv���܂��B
�����\�t�g�́A16bit�Ō������ł���Adobe��Photoshop CS���K�v�ł��傤�B8bit �Ō�������
�ƊK������т܂��B�F�̊Ǘ����ł��郂�j�^�[��F�Ǘ��\�t�g���K�v�ł��傤�B
�����ԍ��F13847702
![]() 0�_
0�_
>�ŋ߂̃J�����ɂ́A�_�C�i�~�b�N�����W���\�t�g�I�ɍL����@�\�͂���܂����A�ኴ�x�̃m�C�Y��
>�������Ă��܂��P�[�X�������āA��ؓ�ł͂����Ȃ��Ɗ����Ă��܂��B
����͒P�ɈÕ���ł��B
���ۂɂ̓\�t�g���H�Ń_�C�i�~�b�N�����W�͍L����܂���B
��ʓI�Ƀf�W�^���͈Õ������̃_�C�i�~�b�N�����W�̋��e�ʂ��L���ׁA
�I�o�̒��S���Õ������փV�t�g���������ɘI�o���v���X���Ă邾���ł��B
�����B�e�������ł���_�C�i�~�b�N�����W���L���鎖���\�ł��B
����Ɋւ��Ă̓\�j�[���i�̋@�\���D�G�ł��B
>��{�Ƃ��ẮARAW�ŎB�e���āA�B�e���e�ɍ��킹�āA�����Œ��ߌ������邵���Ȃ��ƍl���Ă�
�܂��B
RAW�Ōォ���݂̂ł͌��E���������܂��B
�J�����̈Õ���@�\�Ɠ��l�̎B�e��@�����̂��őP�ł��ˁB
>16bit�Ō������ł���Adobe��Photoshop CS���K�v�ł��傤�B8bit �Ō�������
>�ƊK������т܂��B�F�̊Ǘ����ł��郂�j�^�[��F�Ǘ��\�t�g���K�v�ł��傤�B
���ӂ����˂܂��B
�P�ɏo�͂̕���\�������邾���Ō��̃_�C�i�~�b�N�����W�̋�����₤���ł͂���܂���B
�����ԍ��F13848430
![]() 6�_
6�_
sakurakara����
���̏�����������ۂLj�����ł��傤���ˁB
�������Ă��������邩�ۂ��͕ʂɂ��āA������ꂽ�܂܂ɂ��ĕ����Ă����͎̂���ł��̂ŁA��x�������X���Ă����܂��B
�悸�A�f�W�J���i�f�W�^���ʐ^�@�j�̃_�C�i�~�b�N�����W�ɂ��ĉ����R�����g���Ă��܂���B�]���āA�R���g���X�g�̒Ⴂ�摜�́u�J�����v���_�C�i�~�b�N�����W�������Ɖ��߂��ꂽ�̂́A���̕��������E���ǂ݂��ꂽਂȂ̂ł͂Ȃ����Ǝv���܂��i����Ȃ��Ƃ͈ꌾ�������Ă��܂���B���͂̈ꕔ�����o���Ƃ��̂悤�ɓǂ߂邾���ł��j�B
���������Ƃ������������ݍӂ��Č����ƁA�Ⴆ��NIKON��D3s�̗l�ȁA���Ƀ_�C�i�~�b�N�����W�̍L���J�����Łu�S�������_�C�i�~�b�N�����W��L����J�����v���A�Q�䂠�����Ƃ���ƁA���̕]���@�ł́A�R���g���X�g�̍������̃J�������_�C�i�~�b�N�����W�������]�������\��������Ɛ\���グ�Ă��邾���ł��B
�����ԍ��F13849165
![]() 3�_
3�_
G3�̓R���g���X�g���������߁A�_�C�i�~�b�N�����W�������ƕ]������Ă���Ƃ������Ƃł����H
�����ԍ��F13849650
![]() 1�_
1�_
�����i�~�X�ł��邱�Ƃ͋C�Â��Ă��炦�邩�Ǝv���܂����A�t�ɏ����Ă��܂��܂����j
��F�R���g���X�g�̒Ⴂ�摜�́u�J�����v���_�C�i�~�b�N�����W���@�����@�Ɖ��߂��ꂽ�̂́A
���F�R���g���X�g�̒Ⴂ�摜�́u�J�����v���_�C�i�~�b�N�����W���@�L���@�Ɖ��߂��ꂽ�̂́A
�ł��B�ǂ������݂܂���B
IHopeSlowLife����
�t�B�����̎��́A�t�B�������o�̓f�o�C�X�̈�ł�������A���ڂ���ŕ]������Ζ��Ȃ������̂ł����A�f�W�J���ɂȂ��Ă���A�_�C�i�~�b�N�����W�ɂ��扽�ɂ���]���̓v�����g�Ƃ����j�^�[��ł�����Ȃ��Ȃ�܂����B
�������Ȃ���A�f�W�J���̕]���@�Ƃ��Ă͌����̂��͉̂����J������Ă��Ȃ��A�t�B�����̎��̂��̂����̂܂ܗp���Ă���܂��B
DxO Lab�@�̃f�[�^��print��screen�ł͕]�����ʂ�����Ă��܂��ˁB�o�̓f�o�C�X�ƓƗ����ĕ]�����邱�Ƃ��o���Ȃ����炱�̂悤�Ȃ��ƂɂȂ�܂��B
��G3�̓R���g���X�g���������߁A�_�C�i�~�b�N�����W�������ƕ]������Ă���Ƃ������Ƃł����H
DxO Lab�@�̃f�[�^���������߂Ă݂��̂ł����A�܂�������������Ă��܂���B
�F����̂���������Ă���_�C�i�~�b�N�����W�͋��炭�ADxO Lab�̃f�[�^����ł͔��f�ł��Ȃ������m��܂���i����͏o���邩���m��܂��A�܂����̒��������ł��Ă܂���j�B
G3���R���g���X�g�����߂ł���悤�ɂ͎v���܂��i�_�C�i�~�b�N�����W�����߂Ȃ̂ɂ��ւ�炸�A����ł�print�̕���screen�̃f�[�^���_�C�i�~�b�N�����W���L���o�Ă��邱�Ƃ��R���g���X�g���������Ƃ��������Ă���悤�ȋC�����Ă��܂��j���A�J�����̔\�͂Ƃ��Ẵ_�C�i�~�b�N�����W���L�����������́A���f�ł��Ă��܂���B
�Ԃ����āA�Ƃ����悤�Ȋ����̘b�ɂȂ�܂����A
APS-C�T�C�Y�̃Z���T�[�ł�����͂ǂ���\���Ȑ��\��L���Ă��܂��B�e�Ђ̃J�����ɑ���l�����A�F�ɑ���l�������قȂ��Ă��邱�Ƃ̕����A�Z���T�[�̃e�X�g���ʂ��e���͑傫���Ǝv���܂��B�e�X�g���ʂɂ��܂�Ƃ��ꂸ�A�C�ɓ������悪�o�Ă���̂ł���Ώ\���ł͂Ȃ��ł��傤���B
�����ԍ��F13850016
![]() 0�_
0�_
����A���Ȃ�̐��̃f�W�J�����_�C�i�~�b�N�����W�̊g��@�\�����悤�ɂȂ��Ă��܂��B
�������A����p������܂��B���L�̓L���m���̃t���T�C�Y���̗�ł��B
http://bbs.kakaku.com/bbs/-/SortID=10480211/#10486752
�_�C�i�~�b�N�����W���C�ɂ���Ƃ������Ƃ́A�K�������A�������肷�邱�Ƃ�
�C�ɂ���Ƃ������ƂƓ����Ȃ̂ŁA���̏������AAdobe�@Photoshop CS���g���ׂ��A
�Ƃ����̂͊Ԉ���Ă��Ȃ��Ǝv���܂��B��{�Ƃ��ẮA�F����Ȃ��ő�l�ƁA�m�C�Y
�ɉB��Ȃ��ŏ��l�̕����傫���Ƃ������ƂȂ�ł��傤���E�E�E�B
�����ԍ��F13852535
![]() 0�_
0�_
>�_�C�i�~�b�N�����W���C�ɂ���Ƃ������Ƃ́A�K�������A�������肷�邱�Ƃ�
>�C�ɂ���Ƃ������ƂƓ����Ȃ̂Ŏ��̏������AAdobe�@Photoshop CS���g���ׂ��A
>�Ƃ����̂͊Ԉ���Ă��Ȃ��Ǝv���܂��B
�S�R�C�R�[���ł͂Ȃ��ł��B����\�ƃ����W�͈Ⴂ�܂��B
�_�C�i�~�b�N�����W�s���������Ŗ������g�[���W�����v�����肵�܂�������͕����I��"����"�ł��B
���ꂪ�N���錴���͂��������}�b�s���O�O�̃f�[�^�����ł��邹���ł���A
�W�J����\�t�g�̕���\�łǂ������Ȃ���̂��Ⴀ��܂���B
��������16�r�b�g�̌����������Ă���͍̂L��ȃ_�C�i�~�b�N�����W���������\�[�X�������Ă����ł��B
���̃\�[�X���}�b�s���O�����k����ۂ�16�r�b�g�̕���\�������Ă��܂��B
�Ƃ͂����Ă���ʐl���ڂŔ��f�ł���悤�ȃ��x���ł͂���܂���B
�t�ɁA�f�q���E�ɂ�锒��т�F�O�a�͈�ڂł킩��܂��B
PhotoshopCS�@�H�H
����Ȃ��̉掿���オ���J�͂��܂���B
G3�Ƃ̑g�ݍ��킹���l����Ɠ����o�����X�I�ɂ����Ƃ��i���Z���X�ƌ�����ł��傤�B
������c�[����ʉ߂����邱�Ƃʼn掿���オ�����悤�ȋC�ɂȂ邾���ł��B
�����ԍ��F13853495
![]() 7�_
7�_
����??
�ŋ߂̈��t�n��14bit��RAW�f�[�^�ł��BG3��12bit��RAW�ł��B�Ȃ̂ŁA
�K�����C�ɂȂ�ꍇ�́A16bit�ɐݒ肵�ď��������܂��B�f�t�H���g�́A
8bit�ł��Bphotoshop elements�́A8bit�̏��������ł��Ȃ��Ǝv���܂������E�E
�����ԍ��F13853534
![]() 0�_
0�_
�f�W�^���n����
����₷���������܂��傤���H
RAW�\�[�X��14bit���낤��12bit���낤������Ɋi�[�����Z���T�[�̒l�����ɂɔ��ł��ł��B
�_�C�i�~�b�N�����W�ɗ��ފK���̘b�͂����������Ȃ�ł��B
�f�[�^�I�ɂԂ��Ƃl���ǂ�ȕ���\�ŏ������悤���Ӗ���������ł��B
�t�ɁA�Z���T�[�̋��e�͈͓��ɔ[�܂����f�[�^�ł����
������8�r�b�g���낤��16�r�b�g���낤���قڍ��͂���܂���B
70�_��71�_�ɂȂ���x�̘b�ł��B
�t�Ƀf�W�J���������60�_��80�_�ɕς��܂��B
AdobePhotoshopCS�ʼn]�X�͎����猾�킹��A
�o���邾���̋��z���o����90�_�̃J����������ɓ��ꂽ�l��
��p�Ό��ʖ����ł����91�_�ɂ������l�����̘b�ł��B
G3���[�U�[��CS�H�H
������~���ׁ̈H
����Ȃ��̂�E�߂�Ȃ�ăi���Z���X��ʂ�z���Ă܂��B
�����ԍ��F13865163
![]() 8�_
8�_
F300EXR�̃t���b�V���͏�Ɂi���������PhotoshopCS�i���݂�CS5�j���g�������Ƃ������ł����H
�����ԍ��F13868115
![]() 2�_
2�_
��RAW�\�[�X��14bit���낤��12bit���낤������Ɋi�[�����Z���T�[�̒l�����ɂɔ��ł��ł��B
����Ȃ��Ƃ͂킩���Ă܂���BG3�̃_�C�i�~�b�N�����W���L���Ȃ�Č����ĂȂ��B
�����A�K�����C�ɂ���Ȃ�A�K�����ׂ�����������\�t�g���K�v�Ə����������ł��B
JPEG�̎���ďo�����ƁA�^�����ɒׂ�Č����Ă��A�����ŃR���g���X���o�Ă���
���Ƃ͂�������܂��B
�����ԍ��F13870022
![]() 0�_
0�_
DX0�̃_�C�i�~�b�N�����W�̌v�����Ăǂ�����Ă��ł��傤��
14bit�o�͂Ȃ̂�14EVS���Ă�@��Ƃ������āA���_�l�����Ă�̂ł́H
�Ǝv���Ă��܂��B
�����W��CD�Ƃ��̃_�C�i�~�b�N�����W��96db�Ƃ���Ă��܂����A
����́A16bit�Ȃ̂ŁA20*log 10 2^16 = 96.32
EV�̌`���ɂ��킹��ƁA16���Ď��ɂȂ��ł����A
14bit�o�͂Ȃ̂�14���邱�Ƃ͂��肦�Ȃ��͂��ł��BEVS��+1�����
14bit�̏ꍇ15�����_�l�Ȃ̂��ȁH
�܂��ARAW�f�[�^�����Ɍv�Z���Ă���̂ł���A14bit�Ȃ�15�����_�l��
�l���Ȃ��ƁA���낪����Ȃ��ł���ˁB
�����ԍ��F13876220
![]() 0�_
0�_
Immelmann����
���͂悤�������܂��B
��14bit�o�͂Ȃ̂�14EVS���Ă�@��Ƃ������āA���_�l�����Ă�̂ł́H
���Ǝv���Ă��܂��B
1bit�ƂPEV���Ή����Ă���K�v�͂���܂���B
EV�͒P�ɖ��邳���i���邳�̍����j�\���Ă��邾���ł��B12bit�@�Ń_�C�i�~�b�N�����W14EVS�Ƃ������Ƃ́A14EVS�̖��邳�̍���12bit�ŕ������ďo�͂��Ă���Ƃ������Ƃł��B14EVS��12bit�����͏\���ȕ���\�ł����AJPG��8bit�ł��\���\���ł��܂��B
�o�͂̓f�W�^���ł����A���͂̓A�i���O�ł�����A�@���l�ɂł������ł��܂��B
���łɁA�ǂȂ�����������Ȃ����A�i�C�X���R�~�����[���͂����Ă���Ƃ�����̕ς��Ȃ��ł��̂ŁA�Ƃ肠�����R�����g���Ă����܂��B
��DR�̋����J�������ADR�̍L���J�����̎ʐ^�̕����R���g���X�g�͍��������₷���Ȃ�܂��B
���낢���₱�������Ƃ�����܂��i���j�A�ȕ����ƃ��j�A�Ŗ����������ǂ��U�蕪���邩�Ƃ������j���A�u�ʏ�v����͂��蓾�܂���B��ʓI�ɂ͋t�ł��B
���n�C�_�C�i�~�b�N�����W�Z�p�Ő������ꂽ�摜�������ɂȂ������Ƃ͂���܂����H�R���g�����X�g�Ⴂ�ł����H
����͊ԈႢ�Ȃ��R���g���X�g�͒Ⴂ�ł��B�F�̂�̗ǂ����Ƃƃ_�C�i�~�b�N�����W����������Ă���悤�Ɏv���܂��B
�����ԍ��F13876997
![]() 2�_
2�_
seresci����
EV�����邳�̍��ł��邱�Ƃ́A�������Ă��܂��B
1EV�オ��Ɩ��邳��2�{�ɂȂ�̂ŁA
14EV�̍��Ƃ́A2��14���{�ƌ������ƂɂȂ�܂��B
2��14���15bit�Ȃ��ƕ\���ł��܂���B
14EVS�̖��邳�̍���12bit�ŕ����Ƃ́A�ǂ������Ӗ��ł��傤���H
14EV�̍��́A2��14���{�Ƃ������Ƃł���A�����12bit�ł͕\���ł��܂���
��������́ADX0�̌v�����@���ARAW�f�[�^�̉�͂ōs���Ă��āA
�Ȃ����ARAW��14bit�l�������ł���Ɖ��肵���ꍇ�̘b�ł��B
AD�R���o�[�^�O�̃A�i���O�o�͂���͂��Ă���̂ł���A
�o��bit���Ɉˑ����Ȃ��ł�����
�����ԍ��F13880798
![]() 0�_
0�_
�X���傳���
�b���ǂ�ǂ�O��Ă��݂܂���B
Immelmann����
���͂��Ă�����̋����̓A�i���O�̘A���ʂł��B
�]���āA1EV��1bit�ɑΉ�����K�v�͑S������܂���B1.1EV��1bit�ɑΉ������Ă��A1.2EV��Ή������邱�Ƃ���肠��܂���B
�c����EV�ɉ�����bit���Ƃ����O���t�ŌX����45�x�ł���K�v�͉�������܂���B
�i�f�W�^���ł��A45�x�ł���K�v�������Ƃ����C�����܂����A�����ł̋c�_�ƑS���قȂ����c�_�ɂȂ�̂őΏۊO�Ƃ��܂��B�j
��14EVS�̖��邳�̍���12bit�ŕ����Ƃ́A�ǂ������Ӗ��ł��傤���H
���邳�͘A���l�ł��A�Ⴆ�A14EV�̖��邳�̍���4096�Ŋ������l��1bit�ɑΉ�������Ƃ������Ƃł��B
�l�̖ڂ́i���������ł����j�A���̃G�l���M�[�̍��قnj��̋���͊����܂���i�\���������̂��ƂƎv���܂��j�B14EV�̍���4096�Ŋ������l�͏\���ȕ���\��L���Ă��܂��B
�����܂ł͂����܂Ń��j�A�ȊW�ɂ���ꍇ�ɂ��Ăł����A���ۂ̃f�W�J���ł͌��̋��x����bit�������j�A�ȊW�ɂ���̂�8EVS���炢�ł��B�Â��Ƃ���▾�邢�Ƃ���ł�1bit�ɂ���ɑ傫�Ȍ��ʍ����L�^����Ă��܂��B
�����ԍ��F13881823
![]() 2�_
2�_
���X���傳���
���b���ǂ�ǂ�O��Ă��݂܂���B
�����A������e�Ȃ̂ł��܂背�X�ł��܂��A���ɂȂ�̂Ń������Ă܂����B
��14EVS�̖��邳�̍���12bit�ŕ����Ƃ́A�ǂ������Ӗ��ł��傤���H
��14EV�̍��́A2��14���{�Ƃ������Ƃł���A�����12bit�ł͕\���ł��܂���
��Ԗ��邢�͔̂��ŁA��ԈÂ��͍̂��Ƃ��������ō����Ă܂����H
���̔��ƍ��̊Ԃ��������ł��邩�ǂ�����bit���Ō��܂��ł���ˁH
�����ԍ��F13888321
![]() 1�_
1�_
�X���傳��
> ��Ԗ��邢�͔̂��ŁA��ԈÂ��͍̂��Ƃ��������ō����Ă܂����H
> ���̔��ƍ��̊Ԃ��������ł��邩�ǂ�����bit���Ō��܂��ł���ˁH
�͂��A���̔F���ő�̐������ł��B
�����A���̂悤�ȕ����Ō��ꍇ�́A�_�C�i�~�b�N�����W�ł͂Ȃ�
�ʎq���r�b�g���ł��B
���ƌ������ARGB�e�F�̍ő�l��12bit�̏ꍇ��16�i��0xfff�A10�i��4095
�ŏ��l��0�ƌ������ƂɂȂ�܂��B
4096�i�K�Ŗ��邳�̏���RGB���ƂɎ����Ƃ��o���܂��B
RGB�S����0���ƍ��A4095���Ɣ��ɂȂ�܂��B
���ƁAEV�ɂ��Ăł����A���m�ɂ�"��"�ł͂Ȃ�"��"�ł��B
(�������Ə����Ă��܂��Ă��܂���^^;)
F1 SS1�b�̎��̌��ʂ�0EV�Ƃ��āA����1/2��1EV�ł��B
1EV�̂����1/2��2EV�ƂȂ�܂��B
0EV�̒l�������ɒu�����ł����A
����G3��F1�̃����Y�����āA
SS1�b�ŎB�����f�[�^��3000�������Ƃ��܂��B
���̏ꍇ�A�ő�l�ł���
4095�́Alog 2 (4095/3000) = -0.449EV�ƂȂ�܂��B
����3000������1/2�ɏo���邩�Ƃ����� log 2 3000 = 11.55
�ƂȂ荷�́A11.55EV - (-0.449EV) �Ŗ�12EV�ƂȂ�܂��B
���̗ʂ�1/2�ɂȂ�����A1/2�̒l���o�͂���Ƃ����f����
�Z���T�ł���A12bit�o�͂̏ꍇ�A�_�C�i�~�b�N�����W��
12EV�����_�l�ƂȂ�܂��B
12bit�o�͂̋@�킪10�`12��14bit�@��13�`14�ɂȂ�̂͂��ׂ̈ł��B
�����ԍ��F13894035
![]() 0�_
0�_
�X���傳���
�S���W�̂Ȃ����������邵�������A�_�C�i�~�b�N�����W�̈Ӗ����]�藝�����Ă܂��A
GH2�Ƀn�b�L���b�O�ƌ����āA���������t�H�[�������āA�r�b�g���[�g�����{�ɂ����߂���������܂��ƁA�Õ��̉𑜂��ǂ��Ȃ��Ă���悤�ɂ݂��܂����A���̎����_�C�i�~�b�N�����W���L�������ƌ�����̂ł��傤���A
�ڂ�������������������K���ł��B
http://www.raitank.jp/archives/5191
�����ԍ��F13894056
![]() 0�_
0�_
�r�b�g���[�g�́A���k�̕i���Ɋւ���w�W�ł��B
mpeg���̕s�t���k�́A���k�̃A���S���Y���������Ȃ�
���k�����グ��Ƃ���ɔ�Ⴕ�ĕi�����ቺ���܂��B
�r�b�g���[�g���グ��Ƃ������Ƃ́A���k���������肻��ɔ���
�{���̕i���ɂ��߂Â��ƌ������ƂɂȂ�܂��B
�_�C�i�~�b�N�����W�Ƃ̊W�ł����A
�r�b�g���[�g���グ�邱�ƂŁA�Õ��̉𑜂�
�ǂ��Ȃ����Ɗ�����̂́A�����Ƃ̐��\�ɋ߂Â�������ł���A
�n�b�N�ɂ��Z���T�̃_�C�i�~�b�N�����W���オ����
�킯�ł͂���܂���B
�������A�f�[�^�̃_�C�i�~�b�N�����W�͏オ���Ă��邩���m��܂���B
(�Z���T�{���̃_�C�i�~�b�N�����W�ɋ߂Â����Ƃ����Ӗ��ł�)
����ɂ��Ă��A���r�b�g���[�g�̃T���v���Y��ł��ˁB
BS��mpeg2��20Mbps�Ƃ��Ȃ̂�
AVC��44Mbps�Ƃ�66Mbps!!!!�Ƃ��A�������C�̍����Ƃ͎v���܂���B
�����ԍ��F13894232
![]() 1�_
1�_
IHopeSlowLife����
�����̗ʂ�1/2�ɂȂ�����A1/2�̒l���o�͂���Ƃ����f����
���Z���T�ł���A12bit�o�͂̏ꍇ�A�_�C�i�~�b�N�����W��
��12EV�����_�l�ƂȂ�܂��B
����͐������ł��B
�������A
��12bit�o�͂̋@�킪10�`12��14bit�@��13�`14�ɂȂ�̂͂��ׂ̈ł��B
�͌����Ƃ͈قȂ��Ă��܂��B
�f�W�J���ŎB�e����ꍇ�A���Ái�_�C�i�~�b�N�����W�ƌ������Ƃɂ��Ă����܂��j�ɂ�3��ނ���܂��B
�P�߂́A��ʑ̂̃_�C�i�~�b�N�����W�Ōi�F�����B�e����ꍇ�A����͔��ɑ傫�Ȓl�ł��B
�Q�߂́A�J�����̃Z���T�[���߂炦�邱�Ƃ̂ł���_�C�i�~�b�N�����W�ł��B�i�]��������@�͓��R����͂��ł����A����͒ʏ탆�[�U�[�ɂ͂킩��܂���BDxO�@Labs�̃f�[�^�ɂ͍ڂ��Ă��܂���B�j
�R�߂́A�A�E�g�v�b�g�f�o�C�X�̃_�C�i�~�b�N�����W�ł��B�ʏ�̓f�B�X�v���C���v�����g�A�E�g���ꂽ���̂ł��B
�J������12bit�Ƃ�14bit�͓��R�A2�߂̃_�C�i�~�b�N�����W�����������Ă��邩�Ƃ������Ƃł��i1EV��1bit�ƑΉ����Ă���悤�Ȃ��Ƃ͂܂�����܂���j�B
�o�͂���O��JPG�֕ϊ����邽�߁A������8bit�ɂȂ�܂��i���̕����}�b�s���O�Ə�����Ă���̂͂����炭���̂��Ƃ��Ǝv���܂��j�B
�킩��₷�����邽�߂ɁA�Ƃ肠�����A����bit���̂��Ƃ͖������Ă��������i�_�C�i�~�b�N�����W�����������邩�ƌ������Ƃł���A�_�C�i�~�b�N�����W�Ƃ͊W����܂���̂Łj�B
�Q�߂̃_�C�i�~�b�N�����W���ǂ̂悤��3�߂̃_�C�i�~�b�N�����W�ɂǂ̂悤�ɕϊ����邩�����ł��B
�ڂŌ��Ă��ꂢ�ȉ摜�Ƃ́A���Ԓ���EV�l�̕ω��ƔZ�x�̕ω��������I�ɕω����A�Õ��A����сA�����ł�EV�l�̕ω��̊��ɔZ�x�ω������Ȃ��Ȃ���̂ł��B
DxO Labs�̃_�C�i�~�b�N�����W�́A���̒������������łȂ��Z�x�ω��̏��Ȃ��������܂߂ĔZ�x�����m�F�ł���͈͂��w���Ă��܂��B
���������̌X�����傫�����̂̓R���g���X�g�̋����摜�ƔF������A�t�ɌX�������������̂̓R���g���X�g�̎ア�i�����閰���j�摜�ƔF������܂��BG3�̃_�C�i�~�b�N�����W��11EVS���x�Ƃ������Ƃ́A���ꂭ�炢���Y��Ɍ�����Ƃ̔��f�ɂ����̂Ǝv���܂��iCANON���������f�����Ă���悤�ł��j�B
�摜�������ڂɔ����������邩�ǂ����́A����璼�������̌X���A�����E�Õ����ǂ̂悤�ɕ\�����邩�ł����A�A�E�g�v�b�g�f�o�C�X�ɂ��\���ł���͈͂����X�قȂ��Ă��܂��̂ŒP���Șb�ł͂���܂���B
CANON�͎��O�ŃZ���T�[������Ă��܂��B�l�������͂����萻�i�ɕ\��Ă���悤�ł��B���Ȃ킿�A�R�̃_�C�i�~�b�N�����W��11�`12EVS�����肪��ԗǂ��ƍl���Ă���悤�ł��B�����@���܂߂��ׂĂ��͈̔͂Ɏ��܂�悤�ɂȂ��Ă��܂��i12EVS����̂͗ǂ��Ȃ��ƍl���Ă���悤�Ɍ����܂��j�B
NIKON��D3s��D700�AD300(s)��12EVS�ł��B���̕ӂ肪��������ۂɍł����ꂢ�Ɍ����邩��̂悤�Ɏv���܂��iD3x��14EVS�قǂɂȂ��Ă��闝�R�͍��ЂƂ킩��܂��j�B
�ǂ���SONY�͋Z�p�I�����̕������h�����O�ɏo�Ă���悤�ŁA�v�����g�A�E�g���ꂽ�_�C�i�~�b�N�����W���傫����Α傫�������ǂ��ƍl���Ă���悤�ł��iNIKON��D7000��PENTAX��K5��OEM�ł͂Ȃ��ASONY������ꂽ�Z���T�[�����̂܂ܗp���Ă���悤�Ɍ����܂��j�B
�����ԍ��F13894669
![]() 2�_
2�_
�_�C�i�~�b�N�����W�i�ȉ�DR�j���Ă�₱�����ł��ˁB
�����ȈӖ��Ŏg����̂����̈���B
RAW��DR��JPEG��DR�A�Ƃ肠�����A����2�͋�ʂ��܂��傤�B
seresci���c�_����Ă�̂́AJPEG DR�ł����ADxO�̂͂����܂ł�RAW DR�̃f�[�^�ł��B�i��`���v�����@���T�C�g���ɋL�ڂ���Ă܂��B�j
����RAW DR�́AImmelmann����̐����̒ʂ�A�f�q�̋L�^�ł��閾�Í��i��j�ł��ˁB
�ŁA�L�^���ꂽ���Â����ׂĉ摜�Ƃ��ĕ\�������킯�łȂ��A���̈ꕔ�����g���Ȃ��B���͈̔͂�JPEG DR�A�Ƃ����̂�seresci�������������Ă�ʂ�B
JPEG DR�̃f�[�^�͗Ⴆ��DPReview�ɂ���܂��B
http://www.dpreview.com/reviews/panasonicdmcg3/page12.asp
�t���T�C�Y�ł��R���f�W�ł��Œኴ�x��8�`9EV�O��ł��ˁB
�悭�u����ёϐ��v�̂��Ƃ�DR�Ƃ������Ƃ�����܂����A�����JPEG DR�̃n�C���C�g���̘b�ŁARAW DR�͒��ڊW���܂���BK5�Ȃ�ė��_�l(14EV)������RAW DR�����Ă�̂ɔ���ёϐ���G3���Ⴂ��ł��ˁB
JPEG DR�̓��[�J�[�̉���ɊW���镔���ŁA���\�ƌ������d�l�ƌ����ׂ������B
�ł́ARAW DR���L�����Ƃ̃����b�g�́H�掿�ւ̉e���́H�i�Ƃ����̂��A�X���傳��̋������ƁB�j
�͂����茾���āA�Œኴ�x��JPEG���肾�ƁA������ɂ����Ǝv���܂��BDR���L���ق���
�E�Õ��̊K���ɗD���
�Ƃ����̂́A�����ł����A����悤�ł��B
�܂��ARAW�B�e���́A���ݔ\�͂Ƃ���
�ERAW���琶���ł���JPEG�̎��R�x���オ��B
��ł����������摜��ō��ׂꂵ���������~���₷���A�Ƃ����̂͂��̈�ł��ˁB
����ɁA�����x��܂Ŋ܂߂��
�E�����x�܂ŏ\����JPEG DR���ێ��ł���
�Ƃ����͔̂��ɏd�v�ȃ����b�g���Ǝv���܂��B
�����ԍ��F13896693
![]() 2�_
2�_
gintaro����
gintaro�����DxO Labs�̃T�C�g���ǂ���Ă���̂��Ǝv���܂��B
�EAll sensor scores reflect only the RAW sensor performance of a camera body.
�Ə����Ă���̂͒m���Ă���̂ł����A�����Ɩڂ�ʂ������x�ł́A
���v�����@���T�C�g���ɋL�ڂ���Ă܂��B
��������܂���B�����Ă��������Ȃ��ł��傤���B�����ǂ�ł݂����Ǝv���܂��B
���ꂩ��ADynamic range�̃f�[�^��print��screen������A���̒l����قȂ��Ă���̂ł����iprint�̕��������傫�Ȓl�ɂȂ��Ă���j�A���ЂƂ��m�ɗ����o�����ɂ���܂��i�����@�ɂ��Ă͊ȒP�ɏ����Ă͂���̂ł����ARAW�̃_�C�i�~�b�N�����W�Ƃ̊W��������܂���j�B���̗��R�������Ă���������Ƃ��肪�����̂ł����B
��낵�����肢�������܂��B
�����ԍ��F13897085
![]() 0�_
0�_
��Immelmann����
>DX0�̃_�C�i�~�b�N�����W�̌v�����Ăǂ�����Ă��ł��傤��
�Ƃ肠�����A������ɐ���������܂��ˁB
http://www.dxomark.com/index.php/About/In-depth-measurements/DxOMark-testing-protocols/Noise-dynamic-range
>14bit�o�͂Ȃ̂�14EVS���Ă�@��Ƃ������āA���_�l�����Ă�̂ł́H
�������u����H�v�Ǝv���ĂāAseresci����ɉ��̎��₳��ċC�Â��܂������A�����Ă�̂͋K�i�����ꂽ�uprint�v�X�R�A�ł͂Ȃ��ł��傤���B�f�̃f�[�^�ł���uscreen�v�̕��ł͒����ĂȂ��̂ł�?
�������A�S�@��`�F�b�N�����킯�ł͂Ȃ��̂ŁA���̋@���screen�X�R�A�ŗ��_�l���Ă���̂�����A����͑���덷���A�J�������ɍH������A�Ƃ��H
��seresci����@
�����͐��Ƃł��Ȃ��A�ƂĂ��S���͗����ł��Ă܂��ADxO�̑���l�⑪����@�ɂ��ẮA��̃y�[�W�̑��A�i���łɌ䗗�ɂȂ��Ă邩������܂��j�ȉ��̃y�[�W�ɂЂƂƂ������������܂��B
"What is DxOMark?"�i�T���j
http://www.dxomark.com/index.php/About/What-is-DxOMark2
"DxOMark in-depth measurements"(���l�̒�`�A������@�ARAW�ɂ���)
http://www.dxomark.com/index.php/About/In-depth-measurements
"DxO Analyzer"�i��̓\�t�g�j
http://www.dxo.com/intl/image_quality/dxo_analyzer/analyzer_overview
>Dynamic range�̃f�[�^��print��screen������A���̒l����قȂ��Ă���̂ł����iprint�̕��������傫�Ȓl�ɂȂ��Ă���j�A
�Escreen�F�f�̃f�[�^�B��f�̃X�R�A�B
�Eprint�F��800����f�ɏk�������ꍇ��z�肵�āA�K�i���������l�B�f�q�̃X�R�A�B
�ł��傤�B�uscreen�v�͒P�ʉ�f������̑���l�ł�����A�Ⴆ�Ascreen��SN��X�R�A�́A���j�^���Ńs�N�Z�����{�Ϗ܂���ꍇ�̃m�C�Y���ƍl���Ă悢�Ǝv���܂��B��f���傫���قǃX�R�A�͗ǂ��Ȃ�A10M��f�@��20M��f�@���1�i���X�R�A���ǂ��ē��R�B����f�@�͕s���ł��B
�������A�掿���r����Ȃ�Ϗ܃T�C�Y�𑵂��Č���ׂ�ׂ��ŁA���̏ꍇ�A����f�@���k�������傫���Ȃ�A�ŏI�I�ȉ摜�̃m�C�Y���iSN��j�����サ�܂��B�uprint�v�͂��̃t�@�N�^�[���l���������l�ł��B
��8M�ɋK�i�����Ă�ŁA8M��f�@�ł�print=screen�A16M��f�@�ł�screen���print�̃X�R�A��1�i���ǂ��Ȃ�܂��B
�f�q�i�{AD�ϊ��@�j�̉掿���\�������ŏd�v�Ȃ̂�print�X�R�A�ł��ˁB
���p���炯�Ő\����܂��A�ڂ����͈ȉ��̃y�[�W�ɐ���������܂��B
"Detailed computation of DxOMark Sensor normalization"
http://www.dxomark.com/index.php/Publications/DxOMark-Insights/Detailed-computation-of-DxOMark-Sensor-normalization
"Contrary to conventional wisdom, higher resolution actually compensates for noise"
http://www.dxomark.com/index.php/Publications/DxOMark-Insights/More-pixels-offset-noise!
�����ԍ��F13898089
![]() 0�_
0�_
gintaro����
�������A���肪�Ƃ��������܂��B
���́A�J�����ɑ��Ă��܂肠�苻�����Ȃ������̂ł����A
9���Ɏq���̉^����ɍ��킹��G3���w�����A
���܂܂Ŏg���Ă����R���f�W�Ɣ�ׂāA��H
�Ȃ��A�����Y�킾���I���Ďv��
��������������ɁA
�J�����Ɋւ���T�C�g��F�X���ĉ���Ă��܂����B
�ŋ�DX0�̑��݂�m���āA�悭�܂������܂Œ��ׂ����ƁA
�����Ă���悤�ȏ��S�҂ł��B
���́A���̃T�C�g�̌������悭�������Ă��Ȃ������悤�ł��B
�����A���_�l���Ă���̂ł́H
�Ǝv�����̂́Ak-5�ł��B
14.1�ƂȂ��Ă��āA
���������ǂ�Ȍv�����@���Ƃ�Ƃ����Ȃ��I
�Ǝv���Ă��܂����B
�Ȃ�قǁA
800����f���Z�ł���Ȃ�A
k-5��1600����f�ł��̂ŁA800����f���Z�ŁA��f�����̃A���S���Y��
�ɂ����܂����A�����ނ�1bit(��i)�҂���̂ŁA
��f���Ƃ�bit���ɂ��Ă̗��_�l����̂́A
�܂��������Ȃ��ł��ˁB
����������������
link��́A��ϋ����[�����̂���ł��B
���肪�Ƃ��������܂����B
�����ԍ��F13898303
![]() 0�_
0�_
gintaro����
�L���������܂����B
���悻�̑���@�͗������܂����BDxO Labs��������\�t�g�E�G�A�ʼn�͂��Ă���悤�ł��ˁB�ڍׂȓ��e��m��ɂ͒��ڃR���^�N�g���Ƃ�Ȃ��Ƃ����Ȃ��悤�ł����B
���ꂩ��A14EVS�����_�l�Ƃ������ł����A
�����I�ɂ�1bit��1EV�ɑΉ����Ă���̂Ȃ�A�ǂ̂悤�Ȍ㏈�������Ă��A14EVS���邱�Ƃ͖����悤�Ɏv���܂��i����\�ȉ��̏��͉��Z���ĕ��ω����Ă�����Ă��Ȃ��j�B
������A�Z���T�[�̓��͂ɑ���o�͓����̓��j�A�ȂƂ���ƃm�����j�A�ȂƂ��낪����܂��B���j�A�ȂƂ���ł��A���͌��̃G�l���M�[��2�{�ɂȂ�������ƌ����ďo�͂�2�{�ɂȂ邱�Ƃ̕����������Ǝv���܂��B
�m�����j�A�ȕ����͒ʏ�͈Õ��ł��傤�B�����̕����Ɋւ��Ă͊ԈႢ�Ȃ����͌���2�{�ɂȂ��Ă��ɂ킸���̏o�͂̑������������ł��傤�B
���ω����ăm�C�Y������_�C�i�~�b�N�����W��������̂͂��̕������ƍl�����܂��B
�����̂��Ƃ��l����ƁA14bit�@�̗��_�l��14EVS�ł���K�v�͖����Ǝv���܂����������������ł��傤���B
�܂��A��������̊��o�I�Șb�ł����A��ʂɂ��̂悤�ȃZ���T�[�͖��邢���ɑ��Ă͂قڃ��j�A�ɕω����Ă����i�킸���ȃm�����j�A�����o�āj�}���ɖO�a����̂����ʂ̂悤�Ɋ����Ă��܂��B
���ۂɊm�F�����킯�ł͂���܂��A�����̍��iNIKON�ł�����D2�ʂ܂łł��傤���j�͔���т��₷������A�A���_�[�ɘI�����ă\�t�g�Ŏ����グ������Y��ɎB���Ƃ����Ă����̂͂��̂��Ƃ������Ă���悤�ɍl���Ă��܂����B
�ŋ߂̂��͈̂ȑO�ɔ�ה���ёϐ����ɂ߂Č��サ�Ă��܂��B����͂��Ȃ蕡�G�ȏ��������č��P�x���̃m�����j�A���𑝂₵�Ă���Ƃł͂Ȃ����Ƒz�����Ă��܂��i�f�l�Ƃ��ẮA�P�P�̃Z���T�[���\�t�g�I�ɃR���g���[������ʂ����v�����܂��j�B
�����Ȃ��Ă��݂܂��A
DxO Labs�ɂ��ƁA
�EA value of 12 EV is excellent, with differences below 0.5 EV usually not noticeable.
�ƂȂ��Ă��܂��B���ꂩ�炷���Log�X�P�[���iEV�j��������A14EVS��28�����i6bit��j�ōŒ���\���ȕ���\�������邱�ƂɂȂ�܂��BJPG��8bit�Ȃ̂͂��̕ӂ肩�炫�Ă���̂ł͖����ł��傤���i���^�b�`����Β����Ƀ{�����o�܂��̂ŁA12bit�A14bit���K�v�ɂȂ��Ă��܂����j�B
���̍l�����������������Ƃ��낪����̂ł��傤���B
�����ԍ��F13898776
![]() 0�_
0�_
Immelmann����@�������������܂��ėL��������܂��B
���_�C�i�~�b�N�����W�Ƃ̊W�ł����A
�r�b�g���[�g���グ�邱�ƂŁA�Õ��̉𑜂�
�ǂ��Ȃ����Ɗ�����̂́A�����Ƃ̐��\�ɋ߂Â�������ł���A
�n�b�N�ɂ��Z���T�̃_�C�i�~�b�N�����W���オ����
�킯�ł͂���܂���B
�������A�f�[�^�̃_�C�i�~�b�N�����W�͏オ���Ă��邩���m��܂���B
(�Z���T�{���̃_�C�i�~�b�N�����W�ɋ߂Â����Ƃ����Ӗ��ł�)
����Ղ������L��������܂��B
���ݕ��ʂɏo�͂��ꂽ�_�C�i�~�b�N�����W�͈��k���ɂ��A�������Ă��āA
�Z���T�{���̃_�C�i�~�b�N�����W�́A�����ƍL�����̂ł���Ƃ��܂��ƁB
�n�L���O���Ńr�b�g���[�g���グ�Ĉ��k��a�炰�Ă���̂ł��ˁI
�����ԍ��F13899032
![]() 0�_
0�_
seresci����
>�Z���T�[�̓��͂ɑ���o�͓����̓��j�A�ȂƂ���ƃm�����j�A�ȂƂ��낪����܂��B���j�A�ȂƂ���ł��A���͌��̃G�l���M�[��2�{�ɂȂ�������ƌ����ďo�͂�2�{�ɂȂ邱�Ƃ̕����������Ǝv���܂��B
�m�����j�A�ȕ����͒ʏ�͈Õ��ł��傤�B�����̕����Ɋւ��Ă͊ԈႢ�Ȃ����͌���2�{�ɂȂ��Ă��ɂ킸���̏o�͂̑������������ł��傤�B
�����JPEG�o�́i�ŏI�I�ȉ摜�t�@�C���Ƃ��Ă̏o�́j�̘b�ł͂Ȃ��ł��傤���H
http://www.clarkvision.com/articles/evaluation-1d2/
��Figure1�̃O���t�����܂��ƁARAW�o�͂͘I���ʂɔ�Ⴕ�Ă�悤�ł��B
�f�q�o�͂����łȂ�AD�ϊ������j�A�ɍs���Ă���A�Ƃ������ƂȂƎv���܂��B
���̂܂܂ł͖����摜�ɂȂ�܂�����A�摜�ɂ���Ƃ��́ADPReview��DR�̃O���t�̂悤�ɁA���ԕ������������A�Õ��Ɩ����͈��k���܂��Bseresci����̂���������Ă�̂͂��̕����̂悤�ȋC�����܂��B
�����ԍ��F13899818
![]() 0�_
0�_
���ANEX5N��D90��12bitRAW�����ǁuscreen�v DR�X�R�A��12EV�����Ă܂��ˁE�E��Immelmann����
�Ƃ���ŁAseresci����̃��X�ւ̕⑫�Ȃ�ł����Aseresci����̎咣�̂����A
�u���̓��͂�2�{�ɂȂ��Ă��ARAW�o�͂�2�{�ɂȂ�Ƃ͌���Ȃ��v
�Ƃ����̂́A���̒ʂ肾�Ǝv����ł��ˁB
�f�q���̂̔����̓��j�A���Ǝv���܂����A�������Ƃ��Ă��A�`�c�ϊ��̍ۂɃm�����j�A��bit������U�邱�Ƃ͂ł��܂���ˁB���́A�������ȑO�A�f�W�J���ł��̂悤�ȃm�����j�A�ȏ������s���Ă����Ȃ������čl������ł����A��ł�����1DMark2�̃f�[�^���čl�������߂܂����B
�����A�Â��@��i12bitRAW�j�ł����A���̃��[�J�[��V�����@��ł͕�����܂���ˁB
���������~�����d������Ȃ疾�����ɁA�Õ��d���Ȃ�Õ�����bit�𑽂������A�Ƃ����͈̂��̈Ӗ��͂���Ǝv���܂��B�O�҂̏ꍇ�ADxO�̈Ӗ��ł̃_�C�i�~�b�N�����W�X�R�A�͒Ⴍ�Ȃ�A��҂̏ꍇ�͍����Ȃ��Ȃ��ł��傤���B
�ŁA���_�l�����̘b�ɖ߂��ł����ASONY�̃_�C�i�~�b�N�����W�I�v�e�B�}�C�U���A�Õ������͂Ɏ���������@�\���������@��ł́A�Õ���bit�𑽂������Ă�\��������̂ł͂Ȃ����ȁA�ƁB�܂��A���ɂ��_�C�i�~�b�N�����W�����������鏈�����Ă̂͂���Ǝv���܂����ǁA��̉\���Ƃ��āB
�����ԍ��F13901184
![]() 0�_
0�_
IHopeSlowLife����
�X�����肵�Ă���܂��B���ⓙ������Ή��ł��ǂ����B�����邱�ƁA����ł��邱�ƁA������Ȃ����Ƃm�ɂ��Ȃ���o���邾���킩��₷������������悤�ɂ������܂��̂Łi�����邱�Ƃƌ����Ă��v���Ⴂ�����邩������܂���̂ł��̂Ƃ��́A�C�Â������_�ł̒����ƌ������ƂŁj�B
gintaro����
���炵�������\�͂ł��ˁB�����������Ă���܂��i�^�ʖڂɂł��j�B
���p���ꂽ���e�ł����A���{��ŏ�����Ă��Ă����m�ɒ��g���c���ł������ǂ�������������ɁA���܂蓾�ӂƂ͂����Ȃ��p��ł̘b�ł��̂ŁA�����Ɩڂ�ʂ������x�ł͏ڍׂ��c���ł����Ƃ͂ƂĂ������܂��A
�]�����������Ƃ͂��悻������܂����B
Figure 1�̂��Ƃ����Ă���̂ł��傤���B
����́A�gSystem Response�h�Ƒ肵�Ă���悤�ɁA1/8000�b�`1/8�b�ł́i�����đ���2��ނ�F�l�ł́j�V���b�^�[���x�ƃA�E�g�v�b�g�o�͂̔��W�ׂĂ���悤�ł��B�V���b�^�[���x��1/8000�b���ǂꂭ�炢���m���ƌ������Ƃ����A���͈̔͂ł̃A�E�g�v�b�g���ǂ̒��x���m�ɔ�Ⴕ�Ă��邩���d�v�ƍl���Ă���悤�ł��B1/8000�b��1/4000�b�ɕω��������Ƃ��́A�o�͂�2�{�ɂȂ�Ȃ��ƃJ�����Ƃ��Ă͍���킯�ł��B���̐��m���ׂĂ�����̂ł���̂ŁA�����W�ɂ���A���l���������͍̂����@�Ƃ��Ă͓��R�̂��Ƃł��B�Z���T�[�̓����ׂĂ���̂ł͂Ȃ��悤�ł��B
���ꂩ��A�PEV��1bit�ɑΉ��������ꍇ�ł����AAD�R���o�[�^�[��14bit�Ȃ�ǂ̂悤�ɉ��Z���Ă��A���ω����Ă�14EV���邱�Ƃ͏o���܂���B��f�������炷���Ƃɂ��_�C�i�~�b�N�����W���������ƌ������Ƃ́A���j�A�ɂ���m�����j�A�ɂ���A14bit��14EVS�ȏオ�L�^����Ă��邱�Ƃ��Ӗ����Ă��܂��B
gintaro����@�Ȃ�A�����l������킩��ɂȂ�Ƃ����C�����܂��B
�����ԍ��F13901826
![]() 0�_
0�_
�����炵�������\�͂ł��ˁB
�����Ō������킯�ł͂Ȃ��A���̔Ȃǂŋ����Ă���������̂ł��B
��1/8000�b��1/4000�b�ɕω��������Ƃ��́A�o�͂�2�{�ɂȂ�Ȃ��ƃJ�����Ƃ��Ă͍���킯�ł��B
JPEG�Ȃ�V���b�^�[���x�������ɂȂ��Ă��A�o�͂�2�{�ɂȂ�܂����B
�V���b�^�[���x1�b�ł��傤�ǔ����(255,255,255)�������Ƃ��āA�V���b�^�[���x1/2�b��(127,127,127)�ɂȂ�܂����H���ꂾ�ƑS�R�~������Ȃ��ċt�ɍ���܂���ˁB���ꂪ�܂��ɁAseresci����̐�������Ă�uJPEG�́vS���������K�v�ȗ��R�ł��B
���͂Ƃ͉����A�o�͂Ƃ͂Ȃɂ��A���������K�v������Ǝv���܂��B
���͂Ƃ͌��̗ʈȊO�̉����ł�����܂���B��̉�f�̎���̗ʂ��A�V���b�^�[���x�Ő��䂷�邩�i��Ő��䂷�邩�������ʑ̖̂��邳�Ő��䂷�邩�͊W����܂���B�����āA���̓��͂ɑ��āuRAW�o�́v����Ⴕ�Ă��邱�Ƃ��A�O���t�͂͂�����Ǝ����Ă��܂��ˁB
���PEV��1bit�ɑΉ��������ꍇ�ł����AAD�R���o�[�^�[��14bit�Ȃ�ǂ̂悤�ɉ��Z���Ă��A���ω����Ă�14EV���邱�Ƃ͏o���܂���B
����`AD�ϊ��Ȃ�A1EV��1bit�ɑΉ����܂���B
�����ԍ��F13902247
![]() 1�_
1�_
��JPEG�Ȃ�V���b�^�[���x�������ɂȂ��Ă��A�o�͂�2�{�ɂȂ�܂����B
JPG�o�̘͂b�ł͂���܂���A�Z���T�[���̂��̂ł͖����A�V�X�e���Ƃ��Ắi��H���܂߂���ł́j�Z���T�[�̏o�͂ŁiRaw�o�͂Ɋւ��ėǂ��킩���Ă��܂��ARaw�o�͂̂悤�Ȃ��̂ł��傤�j�A�܂��J�����̔\�͂Ƃ��Ă̓V���b�^�[���x�̕ω��ɑ��ďo�͂����j�A�łȂ���Θb�ɂȂ�܂���B�����JPG�ɂǂ̂悤�ɕϊ����邩�͕ʖ��ł��B
������`AD�ϊ��Ȃ�A1EV��1bit�ɑΉ����܂���B
�͂��A���̒ʂ�ł��B
>>14bit�o�͂Ȃ̂�14EVS���Ă�@��Ƃ������āA���_�l�����Ă�̂ł́H
>�������u����H�v�Ǝv���ĂāAseresci����ɉ��̎��₳��ċC�Â��܂������A�����Ă�̂͋K�i�����ꂽ�uprint�v�X�R�A�ł͂Ȃ��ł�>�傤���B�f�̃f�[�^�ł���uscreen�v�̕��ł͒����ĂȂ��̂ł�?
>�������A�S�@��`�F�b�N�����킯�ł͂Ȃ��̂ŁA���̋@���screen�X�R�A�ŗ��_�l���Ă���̂�����A����͑���덷���A�J�������ɍH������A�Ƃ��H
���_�I��14bit�ł�14EVS�����Ȃ��ƃ��X����Ă��������邩��A�f�[�^�͊ԈႢ�Ȃ�14bit��14EVS���Ă��邱�Ƃ������Ă���Ƃ��b�����������ł��B
���ꂩ��ACMOS���̂̓��o�͓����ׂ����Ƃ͂���܂��A
��ʘ_�Ƃ��āA�Z���T�[�̓��o�͓����̓��j�A�ȕ���������Ƃ������x�̂��̂ł��B���̗����Ƀ��j�A�ƌ��Ȃ����Ƃ��o����̈悪����A���o�͂Ƀ��j�A�������K�v�ȏꍇ�A�����܂ł̗̈���g���悤�ɂ��Ă���̂����ʂł��B�J�����̏ꍇ�͈Õ��ł͊��x�������Ȃ邱�Ƃ͖]�܂������ƂȂ̂ŁA���̗̈�܂Ŏg���Ă���Ǝv���܂��B
�����ԍ��F13902894
![]() 0�_
0�_
�����X�́A�ǃ��X�ł��B
gintaro����@�ɂ͂��낢�낲�w�E���������A�܂��A���낢����������Ă����������ӂ��Ă���܂��B
�����ł��F����̂����ɗ��Ă�A�܂��A�F����̂��ӌ����f�����Ƃɂ�菭���ł������̍l�������ǂ����̂ɂȂ�ƍl���Ȃ��烌�X���ė��Ă��܂��B
gintaro����@�̃��X�́A�����x�[�X�ɂȂ���Ă���̂Ŕ��ɎQ�l�ɂȂ�܂����B���낢��ȕ]�����@�𐳊m�ɗ������邱�ƂɊւ��܂��ẮA�T�C�g���̏���łȂ��A���������Ȃ���Ȃ�Ȃ��悤�ł��̂ŏ��Ȃ��Ƃ����͂���C�ɂȂ�܂��A����̂��ƂŊ��o�I�ɂ͏��������ł��܂����B
DxO Labs�ł����A�ނ炪���\���������Ƃ����Ă���̂́A�ނ�̌����\�t�g�iDxO Optics pro�j���g���Ă݂邾���ŏ\�������ł��܂��B�Z���T�[�̕]���Ɋւ��܂��ẮA��̓\�t�g���ނ玩�g���쐬�������̂ł���A�T�C�g�������ł͂��̍l�����������o��悤�ɂ͂Ȃ��Ă��܂���B���ڃR���^�N�g���Ƃ�A�����������疳���ŏ����Ă��炦��̂�������܂��A�ƂĂ������܂ł���C�ɂ͂Ȃ�܂���B
�Ƃ������ƂŁA
�EAll sensor scores reflect only the RAW sensor performance of a camera body.
�́greflect only the RAW sensor performance�h����̓I�ɉ����Ӗ����Ă��邩�͔��f�ł��Ȃ��ƍl���Ă���A�ނ�̌����Ă���_�C�i�~�b�N�����W���^�ɃJ�����̃Z���T�[�̍ő�̃_�C�i�~�b�N�����W��\���Ă��邩�ǂ����́A���̒��ł̓y���f�B���O��Ԃł��B
�����ԍ��F13904209
![]() 0�_
0�_
���ANIKON�ɂ́u���kRAW�v�Ȃ���̂�����܂����ˁB
D90��RAW�ɂ��Ă͌����ȋL�ڂ�����܂��A�ǂ�����t���k���{����"RAW"�̂悤�ł��B
�܂�A�f�q�̐��f�[�^���̂��̂ł͂Ȃ��킯�ŁADR�X�R�A�̗��_�l�����ƊW���肻���ł��B�i�Ⴆ��14bitRAW���疾�����Ԉ�����12bit���kRAW������14bit�\�B�j
���������@��ɂ����ẮADxO��DR�X�R�A�͂��܂肠�ĂɂȂ�Ȃ���������܂���ˁB
�}�j�A�b�N�Șb�ʼn��x�����炵�܂����B
seresci����
�����͌��̃G�l���M�[��2�{�ɂȂ�������ƌ����ďo�͂�2�{�ɂȂ邱�Ƃ̕���������
���܂��J�����̔\�͂Ƃ��Ă̓V���b�^�[���x�̕ω��ɑ��ďo�͂����j�A�łȂ���Θb�ɂȂ�܂���B
2�̎咣�͖������Ă��܂��BRAW�ɂ��Ă͂��̔ɂ͑����̗L�v�ȃX���b�h������܂��B�Ƃ肠�����A���͂Əo�͂̉����ɂ��Ă܂Ƃ߂Ă����ƈȉ��̂悤�Ȋ����ł��B
�E�f�q���̂��̂̏o�́i�A�i���O�j�͓��͂ɑ��ă��j�A
�ERAW�o�́i�f�W�^���j�̓��j�A
�EJPEG�̓m�����j�A
�E��ʂɈ��kRAW��cRAW�ƌĂ����̂̓m�����j�A�Ȃ��Ƃ�����i���X���X���kRAW�Ȃ珃����RAW�Ɠ����j
�����ԍ��F13904353
![]() 1�_
1�_
gintaro����
��http://www.clarkvision.com/articles/evaluation-1d2/
����Figure1�̃O���t�����܂��ƁARAW�o�͂͘I���ʂɔ�Ⴕ�Ă�悤�ł��B
���̃T�C�g�A���������^�ʖڂɓǂ�ł݂܂����B�@gintaro����@�̂��������悤�Ɂi�J�������f���o���Ă���j�Z���T�[�����ł���悤�ł��ˁB���̓_�ł͎��̕����Ԉ���Ă����悤�ł��B
�c�_����₱�����Ȃ�̂Ŗ������Ă��������Č��\�ł����A
�����͌��̃G�l���M�[��2�{�ɂȂ�������ƌ����ďo�͂�2�{�ɂȂ邱�Ƃ̕���������
���܂��J�����̔\�͂Ƃ��Ă̓V���b�^�[���x�̕ω��ɑ��ďo�͂����j�A�łȂ���Θb�ɂȂ�܂���B
���̂��Ǝ��͖̂������Ă��܂���B��ʂɃZ���T�[�����Ƌ@�B�i���̏ꍇ�J�����j�̗v����������v���邱�Ƃ͂Ȃ��A�v�������ɂȂ�悤�ɕϊ�����Ďg����̂����ʂł��B
�������A���̌��͂Ƃ肠�����������Ă��������B
�J�����̓f���o���Ă���Z���T�[�����ɂ��Ă̋c�_�ɍi�肽���Ǝv���܂��B
���p�T�C�g�́AFigs. 1 & 2�@���J���������ł��B���}�Ƃ��ɏc�������Ƃ��Ƀ��j�A���ɂȂ��Ă��܂��B
�܂�A�����̐}�̑啔�����߂Ă��邘���̒l�iNormalized Exposure time�i�b�j�j�́A0.02�`0.6�̊Ԃ̂��̂ł��B����������A���P�x����5EVS�i0.6/0.02��30�j�������W�ɂȂ��Ă��邱�Ƃ������Ă��邾���ł��B
������������Ȓl�́A���ɃV�O�i�����x�����Ⴂ�̂ł��̑�����@�ł͕]���ł��Ȃ��悤�ł��i�{���ɂ��������̂��Ƃ��L�ڂ���Ă��܂����AFig.1�̏�̐}�Ōv�Z�l�iMODEL�j�Ƃ̕W������10�`20���ɒB���Ă��邱�Ƃ����������܂��j�B
���̕]�����@�ł͒�P�x���̕]���͓���悤�ł��B
�܂�A10EV�Ƃ������������x���ł̒����W�ɂ��Ă͂��̕]���@�ł͐G��Ă��Ȃ��ƍl����ׂ��ł��傤�B
�ڂ���������̋����ƁA���̃G�l���M�[�̊W��log�X�P�[���ŕ\���������ǂ��A���̂���EVS���g���Ă���̂͂������̒ʂ�ł��B
Fig.3�����Ă���������Ε�����܂����A���j�A�X�P�[���ł���0.6�b�܂Œ����ł����Ō����ɃT�`���Ă��܂��B
���ꂪ���炭�����q�ׂ��ߋ��̃J�����̓����i���P�x���ŋ}�ɔ���т��邽�߁A�A���_�[�ŎB�e���Ď����グ��̂��펯�ł������j�������Ă���悤�Ɏv���܂��i�]���͂PD MKII�ōs���Ă���j�B
���̃J�����̏o�͓��������P�x���ł��̂悤�ɂȂ��Ă��邩�͋����̂���Ƃ���ł��B
���������́A�l����ޗ����Ȃ��̂ŋ����Ă������������Ǝv���܂��B
12bit��AD�R���o�[�^�[�ł�12EVS�����_�l���Ƃ���������Ă��܂����A���̍l���̔w�i��1bit��1EV�ɑΉ�����ƌ������Ƃ��Ǝv���܂��B
���̏ꍇ�A�ł��Â��Ƃ����1EV�ɂ�2�_�����f�[�^���Ȃ����ƂɂȂ�܂����AJPG�ւ̕ϊ��̍ۂɂ���1EV�͂ǂ̂悤�ɏ�������̂ł��傤���B
���}���ď���ɍ�����f�[�^����JPG�f�[�^�����H
����Ƃ������������Ⴂ���Ă���̂ł��傤���B
�����ԍ��F13907696
![]() 0�_
0�_
�����ł��B
���p�T�C�g�����Ă���������Ε�����Ƃ͎v���܂����A
��FFigs. 1 & 2�@
���FFigs. 1 & 3
�ł��B
�����ԍ��F13907707
![]() 0�_
0�_
>seresci����
�O���t�̌��f�[�^Table 2���A
���ɂ́A0.000125�`0.8�ŁA0.6������ŖO�a���Ă���悤��
�����܂����E�E�E
���̌������Ԉ���Ă���̂ł��傤���H
0.6/0.000125 = 4800 -> log 2 4800 = 12.2EV�͈̔͂�������Ă���悤��
�����܂��B
�����ԍ��F13912687
![]() 0�_
0�_
Fig3�Ɋւ��ẮA�����Ƃ���
"The sensor saturates at about 79,900 electrons, but is quite linear below that level."
�Ƃ���܂����AImmelmann����Ɠ��������ł��B
�����̏ꍇ�A�ł��Â��Ƃ����1EV�ɂ�2�_�����f�[�^���Ȃ����ƂɂȂ�܂����AJPG�ւ̕ϊ��̍ۂɂ���1EV�͂ǂ̂悤�ɏ�������̂ł��傤���B
12bitRAW����8bitJPEG�ւ̕ϊ��ŁA�Õ��͂Ԃ�܂��BRAW�ł�0��1�́A�W���I��JPEG�ł͂ǂ����0�ɑΉ�����ł��傤�ˁB
JPEG�_�C�i�~�b�N�����W��9EV���x�ł�����A����3bit�����炢�͍��Ԃ�Ƃ��ĕ\������Ă��܂��B
���ۂ̓��͂ɑ���JPEG�o�͂̃O���t�́A�Ⴆ�Ώ�ł��Љ�܂���DPReview�ɂ���܂��B
http://www.dpreview.com/reviews/olympuse5/page7.asp
�����ԍ��F13917176
![]() 0�_
0�_
���M�X���b�h�q�����܂����B
seresci����̊��Ⴂ������グ���̂��H���{�I�Ȍ�F������悤�ɂ������܂��B
�_�C�i�~�b�N�����W�Ƃ́A�����̗p��̂ЂƂł���A�������܂���B
�l�b�g�����Œ��ׂ������A���̃X���b�h��ǂނ��A���S�ł��B
�D�������́A�C�����Q���Ȃ��悤�ɋ����Ă����܂��B�����͌h���܂��B
�����ԍ��F13939580
![]() 1�_
1�_
>gintaro����
>JPEG�_�C�i�~�b�N�����W��9EV���x�ł�����A����3bit�����炢�͍��Ԃ�Ƃ��ĕ\������Ă��܂��B
����͍������Ⴂ�ł��ˁB
�ڂ������Ȃ�܂��B
�������Ƃ��������Ȃ��ł��B
seresci����ւ̏ꍇ�͈Ӓn���ɂ���������銴���ł�����������͖{���ł��ˁB
�̂ƈႢ�p������̖{���������킩���ĂȂ��l�������\�J�������������Ďʐ^���B�鎞��ɂȂ����Ɗ����Ă��܂��B
��������͋�s�ɂȂ�܂�
�_�C�i�~�b�N�����W�Ɋւ��ĉ��������Ă���&���f�\�͂̂Ȃ�����
�f�W�^�����Ɠ����ɑ�ʂɃJ�����E�ɂȂ��ꍞ��ł����ׂɁA
�����e�Ђ̓_�C�i�~�b�N�����W�������Ƃ���ɂ���悤�ɂȂ�܂����B
�_�C�i�~�b�N�����W���]���ɂ��đf�q���𑜓x�ƍ����x�ɐU�蕪�����̂ł��B
�B��ʐ^�������F�Z���c���Ă���t�W�t�B���������̓_�C�i�~�b�N�����W�Ɛ^���Ɍ�������
�ӗ~�I�ȋ@��������Ă��܂������A���f�B�A�������ɕt���Ă�A���ɂ͂��Ȃ��܂���B
�̂ƈႢ�A�ق�99%���h�f�l�J�����}���Ƃ�������ɍ��킹���ω����Ǝv���܂���
�̂Ȃ���̎ʐ^�������镨�Ƃ��Ă͏����߂����ł��ˁB
����ȃX���b�h�𗧂ĂĂ��قڒN���������ł��Ȃ��ł��傤���A
�c�_���Ă��ǂ��炪�����������������Ȃ��l����ł��B
���ʂȃ��X�͏I���ɂ��č�����G3���y���݂܂��傤�B
G3�̓f�W�^���Ȃ�ł̗͂ǂ��J�����ł��B
�����ԍ��F13941053
![]() 6�_
6�_
IHopeSlowLife����
�@���ŋ�GX1������G3�͎����ĂȂ����ǁALiveMOS�Ƃ����p�i�\�j�b�N�̃J�����̃Z���T�[�͉����Ȃׂă_�C�i�~�b�N�����W�����Ǝv���B�ł��A�f�B�X�v���[�Ɏʂ�����A�v�����g�����肵�ĊϏ܂��镪�ɂ�8EV���ʂ����v��Ȃ��炵������C�ɂ���K�v�Ȃ���Ȃ����ȁB
�@������RAW�ł����B��Ȃ��Ă��A��D90�g���Ă��ďW���ʐ^�ȂB�������ɁA���̐l�̊�Ƃ������������\�t�g�ŏ������邳�������グ�Ă��́A�����ŁB�ł��h���܂��ȁ`�h�Ƃ������Č��\���Ă����B���̌�J������Olympus��E-5�ɑウ�Ď����悤�Ȃ��Ƃ����悤�Ǝv������A���邭�����Ƃ��낪�����U���U���ɂȂ�́B�ŁA���̃J�����̃Z���T�[��LiveMOS�������́B
http://bbs.kakaku.com/bbs/10504011888/SortID=12354255/ImageID=821487/
�@����́A1�N�قǑO�ɃA�b�v�����L�c�c�L�i�A�I�Q���j�̎ʐ^�����ǁAISO400�Ȃ̂ɁA�m�C�Y�U���U���ŁA�F���N�₩�łȂ��ł��傤�H���Ⴀ���̃J���������x���������Ƃ����Ƃ����ł��Ȃ��B
http://bbs.kakaku.com/bbs/10504011888/SortID=12354255/ImageID=820839/
�@�������͈Â��Ƃ���ɂ����E�O�C�X��ISO1600�A���{�ɋ߂����炢�g�債�Đ�o���Ă���̂ɂ���ȂɐF���m�C�Y�������Ȃ��B����ŁA�B�e�X�^�C���ς��ďo���邾���A�B�肽�����̂����Ԃꂵ�Ȃ��悤�ɘI�o�����悤�ɂ����為��Ȃ��B
�@Jpeg�ł����B��Ȃ��A�����ƎB�e���ɓK���I�o���ĈÏ�����Ȃ��Ȃ�_�C�i�~�b�N�����W�͕K�v�Ȃ��Ǝv���B�ł��AE-5�AE-P2�ADMC-GX1�Ǝg���Ă��Ă�����̂́ALiveMOS�̓_�C�i�~�b�N�����W�����I���Ă��ƁBNikon V1�̓Z���T�[�������̂ɁA���̓_�����܂����Ɗ��o�I�Ɏv���Ă����ǁA����DxO�Ƃ����T�C�g�����Ă݂���A����ς�X�R�A�����������B���̃T�C�g�͎����Ƃ��Ă͐M���ł����Ȃ����ȂƎv���B
�����ԍ��F13942314
![]() 1�_
1�_
�����ԑO�̎��₾�����̂ˁB����傳��A�������ĂȂ������B
�@�⑫����ƁA��̃L�c�c�L�̎ʐ^�́A�ƂɋA���Č�����̐S�̃L�c�c�L������Ԃꂵ�Ă����̂Ńv���X����Č��������B���̎ʐ^�́A�������ɂ̓v���X����Ȃ������͂��B
�@���ƁA�������_�C�i�~�b�N�����W�͕s�v�ƌ��������ǁA�ŋߋt���B�e�ňЗ͂�����Ƃ����ł��āA�C���e���W�F���gD�����W�R���g���[���Ƃ��V���h�[�A�W���X�g�����g�e�N�m���W�[�݂����ɃJ������Jpeg���i�K�ŏ���ɈÏ������グ��@�\�����邩��A������g���Ȃ�_�C�i�~�b�N�����W�L���ɉz�������Ƃ͂Ȃ��B
�����ԍ��F13942324
![]() 1�_
1�_
�X���傳��������Ă�����̂��߂ɁA�v�_���i���Ă��̃��X�ɂ܂Ƃ߂Ă݂܂��B
�܂��Agintaro���AEV��bit���Ή����Ă��邱�Ƃ̍����ɂ���Ă���T�C�g�Ɋւ��ẮA�p���ǂނ̂��ʓ|�Ƃ������̂��߂Ɏ�v����v�Ă݂܂��B
���X�������Ȃ�̂łR�i�c�_�̗v�_�A�T�C�g�̉p���̗v��A�R�����g�j�ɕ����܂��B
�����Ă��e���X�������Ȃ��Ă��܂��܂����B
���̋��x��1EV��������ƌ��̃G�l���M�[��2�{�ɂȂ�܂��BBit�����P��������ƂQ�{�ɂȂ�܂��B�]���āAAD�R���o�[�^�[��14bit�̏ꍇ�A1bit��1EV�ɑΉ�������Ɠs�����ǂ��v���܂��B
���̏ꍇ�A�ǂ̂悤�Ɋ撣���Ă��_�C�i�~�b�N�����W��14EVS���邱�Ƃ��o���Ȃ��͂��ł��B�������Ȃ���ADxO Labs�̃_�C�i�~�b�N�����W��Print�]���ł�14bit������̂�����A12bit��AD�R���o�[�^�[��screen�f�[�^��12bit������̂�����igintaro����̎w�E�j�B
����́A1EV��1bit�ɂƂ����悤�ȃ��j�A�Ή��ł͐����ł����A�j�A�Ή��Ȃ̂ł͂Ȃ����Ƃ���Seresci�̃R�����g�ɑ��Agintaro����A
http://www.clarkvision.com/articles/evaluation-1d2/
�Ƃ��T�C�g��Figure 2������A���炩�Ƀ��j�A�Ή����Ă���ƁB
���̃T�C�g��Figure 2�́A���P�x����5EVS�����������ɍڂ��Ă��āA�Õ���7EVS�͌덷���傫������̂ŁA�����ɍڂ��Ă��邩�ǂ����͔��f�ł��Ȃ��Ƃ́@Seresci�@�̈ӌ��ɑ�
Immelmann����@���A
��0.6/0.000125 = 4800 -> log 2 4800 = 12.2EV�͈̔͂�������Ă���悤��
�������܂��B
gintaro����@����iFigure 3�Ɂj
��"The sensor saturates at about 79,900 electrons, but is quite linear below that level."
�Ə����Ă���̂ŁA�i�����M�p���āj12.2EV�͈̔͂Ń��j�A���ƍl����B
�ƃR�����g����Ă��܂��B
�i����ȊO�̓��e������܂����A�c�_����₱�����Ȃ�̂ł��̓_�ɍi��܂��B�j
���j�A�F�@�ω��������I�ł��邱�Ɓi�K��������Ⴕ�Ă��邱�Ƃ��Ӗ����Ă��܂���B���W�̓��j�A�ł����A���j�A������ƌ����Ĕ�Ⴕ�Ă���Ƃ͌���܂���j�B
1EV�̌��x���i���x��j��1bit�ɑΉ�������ꍇ�́A���̌X����45�x�ł���A1EV�������邲�ƂɁA1bit�������邱�Ƃ��Ӗ����Ă��܂��B����̓��j�A�ȊW�ł������W�ł͂���܂���B
�Ⴆ�A1EV�`14EV�܂ł�1bit�`14bit�ɑΉ�������ƁA0EV��0.5bit�i���݂��Ȃ��j�A-1EV��0.25bit�Ɓ|���`1EV��0�`1�̊ԂɑΉ������邱�ƂɂȂ�܂��B
�����ԍ��F13942531
![]() 0�_
0�_
http://www.clarkvision.com/articles/evaluation-1d2/
�̗v���
�o����seresci�ɂ��⑫�Ȃ̂ŁA�u�Ԉ���Ă����炲�߂�Ȃ����v�ł��B�p
��L�T�C�g�̗v��
�J�����̃m�C�Y�͌��w�I�ɔ������Ȃ��t�H�g���m�C�Y�ɁA�d�C��H���炭��G���N�g���j�b�N�m�C�Y������������ł���B
�V�O�i�����x�������Ƃ��́i�t�H�g���m�C�Y�͌���I�Ȃ̂Łj���ڃt�H�g���̐��ׂ邱�Ƃ��o����B�]���ăV�O�i�����O�a�����Ƃ��̒l����Z���T�[���o������ő�̃G���N�g��������m�邱�Ƃ��o����B
�J�����Z���T�[�̕]���ɂ́A�����Y�̃{�P�A�Z���T�[��̃z�R���A�X�̃s�N�Z���Ԃ̃o���c�L�Ȃǂ�r������K�v������A�����̉e���͎��̂悤�ɂ��ď����ł���B
��������2�������ĎB�e���A���̍����Ƃ�o���҂̃V�O�i���͓����Ȃ̂Łp�m�C�Y�i�t�H�g���m�C�Y�@�{�@�G���N���j�b�N�m�C�Y�j���������o�����B
�o���邾�������ǂ𑽓����Ƒ��z���̍���������ԂŎB�e�B��50cm�̋�������œ_����ɐݒ肵�āA180mm�@f/3.5�̃����Y��1/8000�b�`0.8�b�܂ő���BISO=50�̌��ʂ݂̂������B
����A�ǂݏo���m�C�Y�i�G���N�g���j�b�N�m�C�Y�j�̑���́A�V���b�^�[���x��1/8000�b�ɃZ�b�g���āA�����Y�L���b�v�����ĎB�e�A��Ɠ����悤��2���Z�b�g�ŎB�e����BISO��50, 100, 200, 400, 800, 1600, 3200�B
�ȉ��̃f�[�^�̏�����ImagesPlus 2.5�iIP�j���x�[�X�ɗp�����B���̃\�t�g�ɂ��Raw�f�[�^�����j�A�X�P�[���ɕϊ����邱�Ƃ��o����B�ibe able to convert the raw data with a linear scale�j�o��Raw�f�[�^���g�̓��j�A�X�P�[���ł͂Ȃ��ƌ����Ă���悤�ɂ��ǂ߂�p
Table 1a�@���[�h�m�C�Y�i�G���N�g���j�b�N�m�C�Y�j���茋��
B��: read noise�̑���l�G�@C��: B/1.4142�G�@D��: C/16�i16=4bit�G12bit�l�ɕϊ��j�G
E��:�J������Gain�oTable 2�̍ő�̃G���N�g��������12bit�Ŋ����ċ��߂�Ə����Ă��邪�ő�̃G���N�g�������iGain����v�Z����Ɩ�10���j�͂ǂ��ɂ��ڂ��Ă��Ȃ��p�B����ȏ��ISO�ł�Gain��ISO�Ɣ���Ⴓ����iISO=100�̏ꍇ��ISO=50��Gain�̔����j�B
Table 2�@�̓V�O�i���ƃm�C�Y�Ɋւ��Ẵf�[�^�i���̕\�̃m�C�Y�ɂ�Table 1a�̃m�C�Y����������S�m�C�Y�����肳��Ă���j
ISO=50�̏ꍇ��1/8000�b�`0.8�b�ő��肵���B
���̕\�ɂ́A���肵�����σV�O�i�����x�iC���j�A�m�C�Y�̕W�����̑���l�iF���j�Ƃ���炩�狁�߂�S/N��iG����C��/F���j���ڂ��Ă���B
�J�����̃Z���T�[�̒������̕]���Ƃ��āA���f�������Ɍv�Z�����V�O�i�����x�iD���j�Ǝ����l�iC���j���r���Ă��̌덷��E���ɍڂ��Ă���B
System linearity includes the detector linearity, shutter reproducibility, f/stop reproducibility, and light source stability.
�i�V�X�e���Ƃ��Ẵ��j�A���e�B�[�o�]���̎����f�[�^�p�ɂ́A�Z���T�[�̃��j�A���e�B�[�A�V���b�^�[�̐��x�Af�l�̐��x�A���C�g�i�����́j���萫���܂܂��B
�����ԍ��F13942535
![]() 0�_
0�_
http://www.clarkvision.com/articles/evaluation-1d2/
�̕]���@�Ɋւ��ẴR�����g�F
Table 2�ɂ̓V�O�i���ƃt�H�g���m�C�Y����сigintaro����@���uRAW�o�͂͘I���ʂɔ�Ⴕ�Ă���悤�ł��B�v�Ɣ��f�����j�������̕]�����ڂ��Ă���܂��B
�������̕]�����ʁiE���j��C��÷D���o�Ə�����Ă��邪���ۂ́iC�|D�j÷D�p�ƂȂ��Ă���ɂ�������炸�A�iC�|D�j÷C�Ōv�Z���ꂽ�l���\�ɍڂ��Ă���iSeresci�@�����Ƃ��Ă���Õ��ł̌덷�̕����j�B���͌��������Ȏ��ɕ\�̒l�͒�`�ɂ��덷��肩�Ȃ菬�����l�łɂȂ��Ă���i�Ƃ����Ă�27.68���Ƒ傫�����A���m�Ɍv�Z�����38.61%�Ƃ���ɑ傫���Ȃ�j�B���炭�A���̌덷���傫���Ȃ�Ƃ��̑���@�̖��_���]�v�ɖڗ��̂ňӎ��I�ɐ����̑傫�����Ŋ������悤�Ɍ�����B
S/N������߂邽�߂ɍs���������ł��邪�iTable 2�j�A�����́A�Z���ԘI������A1/8000�b�A1/4000�E�E�E��1/16�b�܂Ŕ{�X�ő��肵�Ă���B���̕ω��̂������͒ʏ�A�ΐ��\������Ƃ��̂��߂ɗp�����@�ł���A����Figure 1��log�|log���ŕ\�L�����������j�A�W����̌덷���ǂ̒��x���킩��₷���ɂ�������炸�A�ʏ�̐��`���ɂȂ��Ă���i���̌��ʁA���Ƃ���0.1�Ƃ����v�Z�l�̂Ƃ���ŁA�����l��0.2�ɂȂ��Ă����ꍇ�A�덷�Ƃ��Ă�100%�ł���ɂ�������炸�A����0.1�����Ȃ��̂Ő��`���̃O���t�ł͂��̌덷�͕\���ł��Ȃ������Ȃ킿�덷���傫���Ă��}�ɂ͌���Ȃ��j�B
�܂��A�O���t�iFigure 1&3�j��EV�l�ł݂�ƁA�i���X�ł��w�E�����悤�Ɂj�O���t�̑啔���͍��P�x����5EVS�Ő�߂��Ă��āA��̈Â�����7EVS���̓O���t�̍��[�̕��Ō덷�������ɂ����`�ŕ\�L����Ă��Ĉꌩ���ꂢ�Ȓ����ɍڂ��Ă���悤�Ɍ�����B�덷�̒l���̂͂��̃O���t�̏�ׂ̍��O���t�ɕ\���͂���Ă͂��邪�A�i��L�̂悤�Ɂj���g�Œ�`�������@�Ƃ͈قȂ����v�Z�����āA��`���������Ȓl�ɂȂ��Ă�����̂������B
Immelmann����
��0.6/0.000125 = 4800 -> log 2 4800 = 12.2EV�͈̔͂�������Ă���悤��
�������܂��B
����́Aseresci�@�̃��X�ɑ��锽�_�ɂȂ��Ă��܂���i�덷���傫���ƌ����Ă���̂Ƀf�[�^������Ɠ������Ă�����܂��j�B
gintaro����
��"The sensor saturates at about 79,900 electrons, but is quite linear below that level."
�ł����A����ɑΉ�����{���́A
�gThe system linearity, Column E = Column C / Column D, and is within a few percent, which is very good.�h�ł����A
�덷�������ȓ��ł���̂́A0.125�b�i1/8�b�j��蒷���Ƃ���̂��ƂŁA������Z���I���̂Ƃ���ł́A10%���Ă�����̂������A�ő��34%�ɂ��Ȃ��Ă��܂��i�������v�Z�����47%�j�B�܂�A�����ȓ��̌덷�Ƃ����̂�1/8�b�`0.8�b�Ƃ����͈̘͂b�ł���A�u1/8�b�ȉ��͌덷���傫���āA��P�x����7EVS�ɂ��Ă͂��̎�������͉��������Ȃ��v�����������߂��Ǝv���܂����A�{�����덷�͐����ȓ��ł���ƌ����Ă���̂ł�����A���j�A���e�B�[���ǂ��ƌ����Ă���̂�1/8�`0.8�b���w���Ă��邱�Ƃ͊ԈႢ�Ȃ��ł��傤�B
���̃T�C�g��������l���ԈႢ�Ȃ��ӎ����Ă��ׂĂ̑���͈́i1/8000�`0.8�b�j�Œ����������藧�Ƃ��ǂ߂镶�͂ɂ��Ă���Ǝv���܂��B�{��log�|log���ŕ\���̂��ǂ��ƒm���Ă��邩�炱���A1/8000�b�`1/2�b�܂Ŕ{�X�̘I�����Ԃ��v�悵�ăf�[�^�𑪒肵�Ă��܂��B���炭����ꂽ�f�[�^�����Đ��`�����Ȃ��Ɓilog�|log���ł́j�덷���ڗ��ƋC�Â������߁A���̊ԂɁA1/10�A1/6�A1/5�A1/3.3�A1/2.5�A1/1.6�A1/1.25�b��4EVS�̋��̒��ɑ�R�̃f�[�^�������Đ}-2�̌�������ǂ��d�グ�Ă���ƍl�����܂��i�����āA7EVS���̃f�[�^�������ɒǂ�����Ă��܂��܂����j�B���炩�Ɋm�M�ƓI�s���ł��B�i�������A1/2.5�b�ƁA1/1.6�b�̓Z���T�[�̖O�a����̂��߂ɕK�v�ł��B�j
�]���āA���̃T�C�g�̓Z���T�[�̒�P�x���̃��j�A���e�B�[�����������̂ł͂���܂���B
�PEV��1bit�ɑΉ��������ꍇ�́A�ǂ̂悤�Ȃ��Ƃ����Ă�14bit��AD�R���o�[�^�[��p�������A�_�C�i�~�b�N�����W��14EVS���邱�Ƃ͏o���܂���BDxO Labs��Print�̃f�[�^��14EVS���Ă�����̂�����ƌ������Ƃ́u1EV��1bit�ɑΉ������Ă���̂ł͂Ȃ����Ƃ��Ӗ����Ă��܂��iEV��bit�̓m�����j�A�Ή��ł��邱�Ƃ������Ă��܂��j�v�B�i���ω�����S/N�䂪���シ��̂́A�m�C�Y�����ω�����ď������Ȃ邩��Ȃ̂͂������̒ʂ�ł��BAD�R���o�[�^�[�ɂƂ��āA�m�C�Y���V�O�i�����A�V�O�i���ł��B1bit�ȏ�Ȃ��ƃm�C�Y�����ω�����܂���B�j
�����ԍ��F13942539
![]() 0�_
0�_
�������ԑO�̎��₾�����̂ˁB����傳��A�������ĂȂ������B
�����A���Ă���܂��A���e������Ȃ��Ă����̂ŁA������Ԃł�
seresci����A�v������܂��A���Ƃŏn�ǂ������܂��B<(__)>
����Ɠ��˂ł������₢�����܂��B
�����̌��͈̔́@�@�@�|�|�|�|�|�|�|�|�|�|�|�|�|�|�|�|�|�|
�Z���T�[�̂c�q�͈́@�|�|�|�|�|�|�|�|�|�|�|�|�|�|
�i�o�d�f�̂c�q�͈́@�@�|�|�|�|�|�|�|�|
���Ƃ��āA
�摜�G���W���̃`���[�j���O���A
�@�n�C���C�g��S�炷�ݒ�
�����̌��͈̔́@�@�i�Õ��j�|�|�|�|�|�|�|�|�|�|�|�|�|�|�|�|�|�|�iʲײđ��j
�Z���T�[��DR�͈́@�i�Õ��j�@�@�|�|�|�|�|�|�|�|�|�|�|�|�|�|�@ �iʲײđ��j
JPEG��DR�͈́@�@�@�i�Õ��j�@�@�@�@�@�@�@�@�@�@�|�|�|�|�|�|�|�|�@ �iʲײđ��j
�A�Õ���S�炷�ݒ�
�����̌��͈̔́@�@�i�Õ��j�|�|�|�|�|�|�|�|�|�|�|�|�|�|�|�|�|�|�iʲײđ��j
�Z���T�[��DR�͈́@�i�Õ��j�@�@�|�|�|�|�|�|�|�|�|�|�|�|�|�|�@ �iʲײđ��j
JPEG��DR�͈́@�@�@�i�Õ��j�@�@�|�|�|�|�|�|�|�|�@ �@�@�@�@�@�@ �iʲײđ��j
�@�̓Z���T�[�̎����Ă���c�q�͈͂̂����A�n�C���C�g���̏����g����JPEG������B������Õ��͂Ԃ��B
�A�̓Z���T�[�̎����Ă���c�q�͈͂̂����A�Õ����̏����g����JPEG������B�����甒��т���������B
���܂ł̂��b��ǂ�ŁA����Ȋ����̃C���[�W���A�Ȃ�ƂȂ������Ă���̂ł����A�����Ⴂ�ł��傤���H
�����ԍ��F13944278
![]() 1�_
1�_
����ȃC���[�W�̕����킩��₷����Ȃ����ȁH
Jpeg�C���[�W
�@0�����i�����Ƃ��Õ��j�A100�����i�����Ƃ��n�C���C�g�j
�@����ł��̊Ԃ̊K����0,1,2,3,4,-------,97,98,99,100�ƕ\���Ă����B
�_�C�i�~�b�N�����W�̋����J�����i���Ƃ��f�R�j
�@���m�ł����ԈÂ����邳��1�A������Â���0�ƕ\���B
�@���m�ł����Ԗ��邢���邳���A99�����薾�邢��100�ƕ\���B
�@������A���̃J�����̃Z���T�[�͖��邳���A1,2,3,4,----97,98,99�ƕ\���A��������Jpeg������B
�_�C�i�~�b�N�����W�̍L���J�����i���Ƃ��j�|�T�ˁj
�@���m�ł����ԈÂ����邳��0.1�A������Â���0�B
�@���m�ł����Ԗ��邢���邳��99.9�����薾�邢��100�B
�@������A���̃J�����̃Z���T�[�͖��邳���A0.1,0.2,0.3,----0.9,1.0,1.1-------99.7,99.8,99.9�ƕ\���B�ł�Jpeg�ł�1�_���Ƃɂ����\���Ȃ��̂ŁA����0.1,0.2�ƍׂ����\���Ă������͑S��0�ɁA1.1,1.2�ƍׂ����\���Ă������͑S��1�ɂȂ��Ă��܂��B
�@��L�̗Ⴞ�ƁA���ǃ_�C�i�~�b�N�����W�̋����J�����͕K�v�\���Ȑ��\���������J�����B�_�C�i�~�b�N�����W�̍L���J�����́A�K�v�ȏ�̃n�C�X�y�b�N�J�����Ƃ������ƂɂȂ�B
�@Jpeg��9EVs��G3��10.3EVs�Ȃ�AG3�͕K�v�\���Ȑ��\���������J�����A���S���Ďg���Ƃ����B
�@�j-�T�̉��ʈꌅ�i�Â��Ƃ���ł́A0.1,0.2---�A���邢�Ƃ��ł�99.1,99.2--)�����ʂɎ̂Ă��Ă��邾�����B
�@�������A�_�C�i�~�b�N�����W�̍L���J�����i�j�|�T�j�ł͂���Ȍ|�����o����B
�@���Ƃ��́A0.1��1���A0.2��2�����蓖�ĂāA�Õ��̊K����L���ɂ��邱�Ƃ��o����B���������̕��ق��ɂ�����s���̂ŁA���Ƃ���45.1�`54.9�͂܂Ƃ߂�50�ɂ��Ă܂��I�݂����Ȃ��ƂɂȂ�B���ꂪ�Õ���S�炷�ݒ�BISO���グ��̂����������������B
�@���x�������悤�ɁA�f�B�X�v���[�������Ŋӏ܂������A�_�C�i�~�b�N�����W�̋����͒v���I�ł͂Ȃ��ǂ��납�C�ɂ���K�v���Ȃ��B�K���I�o��S������Ηǂ��������B���F99�_��100�_�ł����]������Ȃ��̂ɁA99.9�_�B��邺�I�A����99.99�_�B��邺�I���Ă����Ă�悤�ȃ��m�A����S����̂Ă���99�_�ł���ƁB�n�C���C�g�d���ɂ���A���[���C�g�d���ɂ���A���Ȃ��̃J�������獕�F�Ɣ��F���o�Ă���A�Â�����F�ƁA���邷����F�������\���ł��Ă���B
�����ԍ��F13944868
![]() 1�_
1�_
IHopeSlowLife����
�����ƕ⑫����A
��̃��X�ŁA
�i�P�jFig.2�@�i��j�@���@Fig.1�@�i���j
�ł��BFig.2�͍���̘b�ƒ��ڊW�Ȃ��̂ŖĂ��܂���B
���ɂ��������̃~�X�����������Ǝv���܂����A�����~�X���ƋC�Â��Ă��炦��Ǝv���܂��̂ł��������̒����͏ȗ����܂��B
�i�Q�j���[�h�m�C�Y��C���� B/1.4142�@�ƂȂ��Ă���̂́A2���̎ʐ^�̍����Ƃ��Ă��邽��2�����̃m�C�Y�̒l�ɂȂ��Ă��܂��B������1�����ɂ��邽�߂Ɂ�Q�Ŋ����Ă��܂��i���v�w��ǂ��������Ă��Ȃ�seresci�ɂƂ��ẮA�u2���̍����Ƃ�ƃm�C�Y�͍ő�Ł�Q�{�J�E���g����邪���ۂ́�Q�{�ɂ��Ȃ��Ă��炸�A��Q�Ŋ����Ă��܂��ƁA�ߏ��]������\���������v�Ƃ����C������̂ł����A���̕��@�͏퓹��i�ł��B�j
�^�i�V���[����@�̌����Ă��邱�ƂŊ�{�I�ɂ͗ǂ��Ǝv���܂����A
�_�C�i�~�b�N�����W���L���ꍇ�A�P�ɈÕ��������グ����A���x���グ���肷��ꍇ�ɗL���ŁA����ȊO�̏ꍇ�͖��ʂɎ̂Ă��Ă���Ƃ����킯�ł͂���܂���B
IHopeSlowLife����̐}�ł�����
�|�|�|�|�|�|�@�����ł��@--�|�|�|�|--�@�ƕ����I�ɏk�߂đ����́@�|�@�����邱�Ƃ��o���܂��B���܂��k�߂邱�Ƃɂ���āA�K���̖L���Ȏʐ^�ɂ��邱�Ƃ��o���܂��B�_�C�i�~�b�N�����W���L���ꍇ�A���̏k�ߕ��̎��R�x�������܂��B
�����A�^�i�V���[����@�����̂��炢�̂��Ƃ͕S�����m�̏�ŁA�b���ȒP�ɂ��邽�߂ɏ������e���������Ęb����Ă���̂��Ƃ͎v���܂��B
�����ԍ��F13950297
![]() 1�_
1�_
seresci����
����0.6/0.000125 = 4800 -> log 2 4800 = 12.2EV�͈̔͂�������Ă���悤��
�������܂��B
������́Aseresci�@�̃��X�ɑ��锽�_�ɂȂ��Ă��܂���
���i�덷���傫���ƌ����Ă���̂Ƀf�[�^������Ɠ������Ă�����܂��j�B
�ʂɔ��_�����킯�ł͂Ȃ��̂ł����E�E�E
���̌������Ԉ���Ă���̂ł��傤���H
�Ə����Ă���ʂ�A����ł��B
�������̐}�̑啔�����߂Ă��邘���̒l
���iNormalized Exposure time�i�b�j�j�́A0.02�`0.6�̊Ԃ̂��̂ł��B
������������A���P�x����5EVS�i0.6/0.02��30�j�������W�ɂȂ��Ă��邱�Ƃ�
�������Ă��邾���ł��B
�Ə�����Ă����̂ŁA0.02sec���ăf�[�^�ɂȂ��̂�����ǁE�E�E
�\�͊W�Ȃ��̂��ȁH�A�������Ⴄ�̂��ȁH
�Ǝv�����₵�������ł��B
seresci����̏������݂́A���X�ɑ��āA���ɍU���I�Ɋ����܂��B
�����^����A����ɔ��_�ƌ��ߕt����̂͂�߂Ă�����������
�Ǝv���܂����A�������ł��傤���H
�Ƃ���ŁA����ł��B
�����P�x����5EVS�i0.6/0.02��30�j
����0.02�́A�ǂ�����o�Ă����f�[�^�ł��傤���H
5EVS�ȏ�̃f�[�^��"�덷?"���傫������Ƃ������Ƃł����A
�ǂ̒��x�܂ł́A���e�o����Ƃ��l���ł����H
�l�̑傫���ɂ���āA���e�o����덷�͕ς��Ǝv���܂����B
���̕ӂ́A�ǂ̗l�ɏ������ׂ��Ƃ��l���ł��傤���H
��������́A�ȉ��̔����ɑ���A���_�ł��B
���PEV��1bit�ɑΉ��������ꍇ�́A�ǂ̂悤�Ȃ��Ƃ����Ă�14bit��
��AD�R���o�[�^�[��p�������A�_�C�i�~�b�N�����W��14EVS����
�����Ƃ͏o���܂���BDxO Labs��Print�̃f�[�^��14EVS���Ă�����̂�
������ƌ������Ƃ�
���u1EV��1bit�ɑΉ������Ă���̂ł͂Ȃ����Ƃ��Ӗ����Ă��܂�
���iEV��bit�̓m�����j�A�Ή��ł��邱�Ƃ������Ă��܂��j�v
��f�P�̂Ō���A�����Ȃ�܂����A������f�̕��ς��̂�Ȃǂ���ƁA
0.5bit�����\���ł��܂��B
1,0,1,0 ���ς��̂�� 0.5
���̗l�ɕ�����f���g�p����ƁA���j�A�ł����Ă�
1��f�̗��_�l���邱�Ƃ��\�ł��B�f�B�U�@�ł���
��������́A�P�Ɏ��̍l���ł��B
�Z���T�̏o�͂��A�K���������j�A�ł͂Ȃ��Ƃ����̂́A���R
�������낤�Ƃ͎v���܂��B
�����A�Ӑ}�I�Ƀm�����j�A�ɂ��邱�ƂŁADR��L���ɂ́A
�A�i���O�i�̐��\��ADC��bit���������Ă���K�v������A
����Ȃ�AADC��bit���𑝂₵�Ă��܂��Ηǂ��̂ł́H
�Ǝv���Ă��܂��B
�����ԍ��F13952395
![]() 2�_
2�_
Immelmann����
��seresci����̏������݂́A���X�ɑ��āA���ɍU���I�Ɋ����܂��B
�������^����A����ɔ��_�ƌ��ߕt����̂͂�߂Ă�����������
���Ǝv���܂����A�������ł��傤���H
�Ƃ̂��Ƃł����A
��0.6/0.000125 = 4800 -> log 2 4800 = 12.2EV�͈̔͂�������Ă���悤��
�������܂��B
�ƁAImmelmann����@�͌덷�ɂ��Ă̍l���ɂ��Ĉꌾ���G����Ă��܂���B���̐l�̓��e�Ƀ��X����ꍇ�́A�ʏ�͂��̓��e�ɑΉ������`�Ń��X����悤�ɂ�����̂ł͂Ȃ��̂ł��傤���B
Seresci�@�̃��X���܂Ƃ��ɓǂ�ł��������Ȃ������Ɣ��f�������܂����i�U���I�ƌ������́A�����Ƃ悭�ǂ�Ń��X���Ă��������Ƃ����C��������ł��j�B
���Ƃ���ŁA����ł��B
�������P�x����5EVS�i0.6/0.02��30�j
������0.02�́A�ǂ�����o�Ă����f�[�^�ł��傤���H
Figure1����ł��i�}���ǂ̂悤�Ɍ��邩�Ƃ����Z���X�̖��ł��̂ł���ȏ�R�����g�͂���܂���j�B
��5EVS�ȏ�̃f�[�^��"�덷?"���傫������Ƃ������Ƃł����A
���ǂ̒��x�܂ł́A���e�o����Ƃ��l���ł����H
���p�T�C�g�̕��ʂ��炵�Đ����Ƃ���̂��ǂ��ƍl�����܂��B
���l�̑傫���ɂ���āA���e�o����덷�͕ς��Ǝv���܂����B
�\����܂���B���̈Ӗ��͗����ł��܂���ł����B
�i������������A�����ł��Ă���̂�������܂��A���̗���ʂ肾�Ƃ���Ə��X�����ł��Ƃ肷��͈͂��n�߂Ă���悤�Ɏv���܂��B�����g�ł����f���������B�j
��1,0,1,0 ���ς��̂�� 0.5
�b�����ݍ���Ȃ��Ȃ��Ă��Ă���悤�ł��B����ȏケ���Řb�������͓̂�����ł��B
�����ԍ��F13953836
![]() 1�_
1�_
seresci����
�����Ƃ���ŁA����ł��B
�������P�x����5EVS�i0.6/0.02��30�j
������0.02�́A�ǂ�����o�Ă����f�[�^�ł��傤���H
Figure1����ł��i�}���ǂ̂悤�Ɍ��邩�Ƃ����Z���X�̖��ł��̂ł���ȏ�R�����g�͂���܂���j�B
�����ƁA�Z���X�H
���m�Ȋ���Ȃ��Ƃ������Ƃł��ˁB
�Ȃ��A���f�[�^�̒l�����p���Ȃ��̂ł��傤���H
�Ӗ��s���ł��B
����1,0,1,0 ���ς��̂�� 0.5
���b�����ݍ���Ȃ��Ȃ��Ă��Ă���悤�ł��B����ȏケ���Řb�������͓̂�����ł��B
������f�𑪒肵�Ă���ꍇ�́A14bitADC�ł����Ă��A14bit�ȏ�̏���
�\���o����Ƃ��������ɂ������āA�h�b�����ݍ���Ȃ��h�Ƃ́E�E�E
�m���ɁAseresci����Ƃ́A�c�_�ɂȂ�Ȃ����ł��B
�����ɔے�I�ȏ��́A�S�ċp���ł́A���܂�ɕs�тł��̂ŁA
seresci����ɑ��锭���́A����ŏI���ɂ��܂��B
�݂Ȃ��܁A�����������āA�\����܂���ł����B
�����ԍ��F13956155
![]() 1�_
1�_
IHopeSlowLife����
�Ƃ肠�����A����Ń��X���I���������Ǝv���܂��B
gintaro����
���낢�닳���Ă��������ėL���������܂����B
gintaro����@�ɂ͎��炩������܂��A�ӌ�����r�I�߂��Ƃ����悤�Ɋ����Ă��܂����B
�����Ă����������T�C�g�͌��\�������낢�T�C�g�ł����B���͂���ł��d�����ɂ������܂����A�C���������炱�̃X���ɁA�����Ă����������T�C�g�̃f�[�^����A�u�f�W�J���łǂ̂悤�ȏ���������Ă��邩�ɂ��Đ��@�ł��邱�Ɓv��t�������Ă݂邩������܂���B
�Ō�ɁA�@Immelmann����@�Ɍ��݂������Ă����܂��ɂ������Ǝv���܂��B
���Ȃ��A���f�[�^�̒l�����p���Ȃ��̂ł��傤���H
���Ӗ��s���ł��B
�ǂ̂悤�ɕ߂炦�邩�͐l���ꂼ��ł����A��������A���̂��Ǝ��͓̂��e�̖{���ɂ͉e�����܂���̂ŁA����قǂ�����闝�R��������܂���B
��������f�𑪒肵�Ă���ꍇ�́A14bitADC�ł����Ă��A14bit�ȏ�̏���
���\���o����Ƃ��������ɂ������āA�h�b�����ݍ���Ȃ��h�Ƃ́E�E�E
��k�����Ń��X���ꂽ�Ǝv���Ă��܂����B
����܂ł̃��X�̒��Ř_�����Ă������Ƃ́A�m�C�Y�����ω������S�^N�䂪���シ��b�iS/N�́ゎ�ɔ�Ⴗ��j�ŁA�f�B�U�̘b�ł͂���܂���B
���݂��łɏq�ׂĂ����܂��B���
2011/12/15 00:30�@[13894035]�@�̃��X�ł����A
�����̏ꍇ�A�ő�l�ł���
��4095�́Alog 2 (4095/3000) = -0.449EV�ƂȂ�܂��B
������3000������1/2�ɏo���邩�Ƃ����� log 2 3000 = 11.55
���ƂȂ荷�́A11.55EV - (-0.449EV) �Ŗ�12EV�ƂȂ�܂��B
�i4095/3000�j�͊ԈႢ�ŁA�������́i3000/4095�j�ł��ˁB
��������̐����ɂ܂Ƃ߂�ƁA
�@�@11.55EV�@�@�@�@-0.449EV
�@�@�@���@�@�@�@�@�@�@��
log 2 3000�@�|�@log 2 (3000/4095�j
��log 2 3000�@�| (log 2 3000 �| log 2 4095�j
= log 2 3000�@�| log 2 3000 + log 2 4095
= log 2 4095
�ƂȂ�A4095�͖�12bit�ł���Ɠ�����O�̂��Ƃ������Ă���ɉ߂��܂���BEV�Ƃ͖��W�̎��ł��i4096�ɂ���Ɛ��m��12bit�ɂȂ�܂��j�B
����ɁA
��F1 SS1�b�̎��̌��ʂ�0EV�Ƃ���
��F1 SS1�b�́u�I�������v�ł���A�u���ʁiEV�l�j�Ƃ͖��W�v�ł��B
0EV�̐����Ȓ�`���m���߂Ă��܂���̂ŊԈ���Ă��邩������܂��i�l�����͍����Ă���͂��ł��j
F�l��1.0�̃����Y�ŁA1�b�Ƃ����I��������EV=0�̒�`�̈ꕔ�ł��邱�Ƃ͊ԈႢ����܂���B
�����AISO=100�̃t�B�������g���āA���˗�18%�̕W�����˔��B�e���āA�t�B�����̔Z�x�����x�i���ƍ��́j���Ԓl�ɂȂ�悤�Ȍ��ʂ��Ǝv���܂��i�����܂ŋ≖����ɂȂ��ꂽ��`�ł��j�B
�������̍����Ƃ���ł����A���Ⴂ���邱�Ƃ�����܂��̂ŊԈ���Ă��v�����Ȃ��Ƃ���͂���܂����A�o���邾���l��f�킹�Ȃ��悤�ɂ��������̂ł��B
�����ԍ��F13968185
![]() 0�_
0�_
seresci���A�������g�ɂ��ԈႢ�����邩������Ȃ��A�Ƃ����ϓ_�Ŏv�l���Ȃ�����A���̘b�͐���ɏI���Ȃ��悤�ł��ˁB�b�̐����̓X���b�h�̏����ɂ��łɏo�Ă���悤�Ȃ̂ŁB
�����ԍ��F13968335
![]() 2�_
2�_
�x���X�ł����E�E
IHopeSlowLife����
�����܂ł̂��b��ǂ�ŁA����Ȋ����̃C���[�W���A�Ȃ�ƂȂ������Ă���̂ł����A�����Ⴂ�ł��傤���H
�����̌��͈̔́��f�qDR��JPEG��DR
�Ƃ����������͐������Ǝv���܂��B�����A�摜�����ɂ͑f�qDR�̂قډE��(�n�C���C�g���j�����ς��܂Ŏg���̂����ʂȂ̂ŁA�f�qDR��JPEG�̊W�́A��ɇ@�̂悤�Ȋ����ł��B�O�a���Ȃ��͈͂ł́A���ʁ����ʂł�����A�n�C���C�g���̕��������SN�����������ł��B���ہARAW�ŎB�e���Ă����ƁA���Ԃ�͈��Ȃ�2�i���ȏ�~���܂����A����т͂�������1�i���x�����~���܂���B
���̑��������A�^�i�V���[����̐������킩��₷���Ǝv���܂����AIHopeSlowLife����̐}�Ő�������ƁE�E�E
REALDR=�����̌��͈̔́A
SENSDR=�f�q���L�^������͈̔�(=RAW DR�ƍl���Ă��ǂ��ł��傤)�A
JPEGDR=JPEG���g���͈�
*�͎��ʑ̖̂��邳
�Ƃ��āF
�ʏ�
REALDR +++++++++*+++++++
SENSDR ---++++++++++----
JPEGDR ------+++++++----
���d��
REALDR +++++++++*+++++++
SENSDR ---++++++++++----
JPEGDR ----+++++++++----
�����d��(�I�o-2)
REALDR +++++++++*+++++++
SENSDR -----++++++++++--
JPEGDR ------+++++++++--
�Õ�����JPEGDR���L���邽�߂ɂ͂��̂܂܈Õ����̑f�qDR���g���Ηǂ��ł��傤�B
�n�C���C�g����DR���L������@�͂���������₱�����ł��B�f�qDR�̕��ł��]�T���Ȃ��̂ŁA�A���_�[�ɎB�e���邱�ƂŁA�f�qDR���n�C���C�g���ɃV�t�g������@����ʓI���Ǝv���܂��B
���̃P�[�X�ɔ�ׂāA���ʑ̂͑f�qDR�̈Õ����ɋL�^����邽�߁A��������m�C�Y�������܂��B�n�C���C�g����DR�g��@�\�iCANON�̍��P�x���K���D��AFUJI�̈ꕔ�@���DR200%���j���g����ISO���x���オ��̂͂��ׂ̈ł��B
�Ƃ肠����RAW�ŎB�e���ĘI�o�����낢�낢�����Ă݂�Ɗ�����������Ǝv���܂��B
�����ԍ��F13987195
![]() 0�_
0�_
��G3�̃_�C�i�~�b�N�����W�����܂����ł����A��͂肻���Ȃ̂ł��傤���H
��[�A�܂��A�I���l�̊��o���ƁA����DR�ASN���݂Ɋւ���������̃p�i�̃Z���T�[�͂ǂ���J�߂�ꂽ����Ȃ��ˁB�ނ����_�ƌ����Ă��������낤�B
����̓p�i�́A�����ăp�i�Z���T�[���̗p���Ă���I���̃J�����ɂ���������BG3�ɑ��Ă��A���̂Ƃ���͓��l�̊��o�������Ă�B
�����炭�摜�����Ƃ��̋Z�p�͐i��ł邩��A���̓I�ȉ掿�A�����ĊG���̂��̂̏������x�ȂNj@�\�I�ȉ��P�͔F�߂��Ă�낤���ǁA���{�I�Ɂ@�u���A�p�i�̃Z���T�[�̓u���C�N�X���[�����悤�����B���N���N��v�@�ƌ��������o�́A�Ȃ��B
�ʂ�DR���L������̃J�������̂��Ƃ͎v��AG3�͂����ƍL���Ă�������Ȃ����A�Ƃ����̂��I���̈ӌ��B
�]�k�����ǁADR���L���A�����Ƃ����������̓z���g�͊Ԉ���Ă�ˁB
�����X��A�J�����̐��E�ł͊���Ƃ��Ēʗp���邩��I�����g�����ǁB
�����ԍ��F13989910
![]() 1�_
1�_
�����ς݂ł���A�܂��A�Ō�̃��X����������ԂԂ��o���Ă���̂ŁA�ǂȂ��������ɂȂ�Ȃ���������܂��A
gintaro����@�ɋ����Ă���������
��http://www.clarkvision.com/articles/evaluation-1d2/
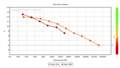
�ɂ��ď��������Ă݂܂��B�i���̃T�C�g��Canon EOS 1D Mark II�ɂ��Ẵf�[�^�ł��B�j
�Q�̃��X�i��L�T�C�g�̃R�����g�ƃT�C�g�̓��e�j�ɕ����܂����A����ł������Ȃ�܂��B���e�͂��������B
���̃T�C�g�ɋ������������̂́A�X�ł̃f�[�^���ADxO Labs�@��Canon EOS 1D Mark II�ƁA���x���グ���Ƃ��̃_�C�i�~�b�N�����W�̒ቺ�Ɣ��ɂ悭���������������Ă��邱�Ƃł��B
���x�㏸�ɔ����_�C�i�~�b�N�����W�̒ቺ�������ɂ��Ă̏����ꂻ���ł��B
�i�������ADxO Labs�̏c����EV�ł��̃T�C�g��electrons�i�Z���T�[����o�Ă���d�q�ʂ��Ӗ����Ă���悤�ł��j�ŁA���ҊԂ̕ϊ��W���͕�����܂��j
�ǂ�ł���ƋC�ɂȂ邱�Ƃ�����܂��B
�_�C�i�~�b�N�����W�����߂�ɂ́A�J�����Ɋg���ኴ�x������ꍇ�͂���ɐݒ肵�đ��肷��K�v������Ə�����Ă��܂����A
2011/12/26 07:39�@[13942535]�@�ɂ��������悤�ɁAISO50�ł̕K�v��electron���A��100,000�i���m�ɂ�10,6000�j����������܂���B
�悭����ƁA���̔�����53,000��ISO100�ɂ���܂����B
�_�C�i�~�b�N�����W�̊�͕��͂ł�ISO50���狁�߂�Ə�����Ă���ɂ�������炸�A���ۂ�ISO100���狁�߂Ă��܂����B
���ۂɃe�X�g�����l�Ԃ����̂悤�ȊԈႢ������Ƃ͎v���Ȃ��̂ŁA�e�X�g�����l�ԂƃT�C�g�𗧂Ă��l�Ԃ��قȂ�̂ł͂Ȃ����Ƃ����C�����Ă��܂��B
�܂��A�_�C�i�~�b�N�����W��electron�����狁�߂Ă��܂����A��������f�W�^���i���o�[�ōl���������ʔ������Ȃ̂ŁA�T�C�g�̃f�[�^��ǂ��������āA�f�W�^���i���o�[����_�C�i�~�b�N�����W�����߂Ă݂܂����B
�����ԍ��F14247389
![]() 0�_
0�_
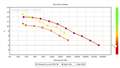
http://www.clarkvision.com/articles/evaluation-1d2/
�̃T�C�g�̃f�[�^����݂��A�����x�ł̃_�C�i�~�b�N�����W�̒ቺ
�i���̃T�C�g�̕��ʂł�RAW�f�[�^�������Ă���Ə����Ă͂��܂��B�j
2011/12/26 07:40�@[13942539]
�ɂ��������悤�ɁA�_�C�i�~�b�N�����W�͍ő�̃G���N�g�������iG���j�����[�h�m�C�Y�iF���G�G���N�g�������j�Ŋ����ċ��߂Ă��邪�A������f�W�^���i���o�[�ɖ߂��ƁA
ISO50�͕ʂɂ��āAAD�R���o�[�^�[��12bit(4096)�����ʂŋ��߂��m�C�Y�iD���̃f�W�^���i���o�[�j�Ŋ����Ă���
(D���̋��ߕ���2011/12/26 07:40�@[13942539]�@�ɖĂ���)
ISO100�@�ł́A4096/1.273=3210�@��G���̒l�Ƃقړ����ɂȂ�i�ϊ��덷�ň�v�j
ISO200�@�@�@�@4096/1.375=2979
ISO400�@�@�@�@4096/1.710=2395
�E �@�@�@�@�@�@�@�E
ISO3200�@�@�@ 4096/9.658= 424
����͉����Ӗ����Ă��邩�Ƃ����ƁA
�_�C�i�~�b�N�����W��AD�R���o�[�^�[�̕���AD�R���o�[�^�[�̃G���N�g�����m�C�Y�Ō��܂��Ă���Ƃ������ƂŁA����Ӗ�������O�̌��ʂɂȂ��Ă���B
�������AISO50�̏ꍇ�́A�Z���T�[�����P�x��������Ȃ��āA�O�a���Ă��܂�12bit�S�̂�L�����p�ł��Ȃ��ƌ������Ƃ̂悤�ł��B
12bit�S�̂����p�ł���A�@ISO50�̃_�C�i�~�b�N�����W�́A
4096/1.176=3483�ɂȂ�ׂ��Ƃ��낪�A���ۂ́A2610�ɂȂ��Ă���B
DxO Labs�@��Canon EOS 1D Mark II�̃f�[�^
http://www.dxomark.com/index.php/Cameras/Camera-Sensor-Database/Canon/EOS-1D-Mark-II#tabs-1
�̊��x�ƃ_�C�i�~�b�N�����W�̊W������Ɣ��ɗގ����Ă���ƌ������Ƃ́A��{�͂��̂悤�ȃ��J�j�Y���Ń_�C�i�~�b�N�����W�����܂��Ă���ƍl���ėǂ��悤�Ɏv���܂��B
Canon EOS 1D Mark II�@�͌Â��^�C�v�̃J�����ŁA�Z���T�[���������̂܂g���Ă���B�ŐV�̃J�����ł̃f�[�^������ƁA���������ʔ������Ƃ������肻���ȋC�����܂��B
�����ԍ��F14247392
![]() 0�_
0�_

���̃X���b�h�ɏ������܂�Ă���L�[���[�h
�u�p�i�\�j�b�N > LUMIX DMC-G3 �{�f�B�v�̐V���N�`�R�~
| ���e�E�^�C�g�� | �ԐM�� | �ŏI���e���� |
|---|---|---|
| 4 | 2026/02/07 7:56:16 | |
| 7 | 2026/02/06 21:45:59 | |
| 9 | 2022/06/19 5:56:57 | |
| 13 | 2022/06/06 5:37:51 | |
| 23 | 2021/05/08 10:41:36 | |
| 7 | 2017/11/14 8:30:10 | |
| 7 | 2017/07/22 20:56:25 | |
| 20 | 2017/01/15 5:04:02 | |
| 11 | 2016/10/22 11:53:37 | |
| 12 | 2016/05/28 16:19:16 |
�u�p�i�\�j�b�N > LUMIX DMC-G3 �{�f�B�v�̃N�`�R�~������(�S 3483��)

���̐��i�̍ň����i������
�̃��[�U�[�����i�ϓ���l������ʒm�A�N�`�R�~�E���r���[�ʒm�A�w���������𗘗p���ł�
�N�`�R�~�f������
�œK�Ȑ��i�I�т��T�|�[�g�I
[�f�W�^�����J����]
�V���s�b�N�A�b�v���X�g
-
�y�~�������̃��X�g�zAbc
-
�y�~�������̃��X�g�z�p�\�R��
-
�y�~�������̃��X�g�z�G�A�R��
-
�yMy�R���N�V�����z2026�ǃR�X�p�Q�[�~���OPC�iAMD�j
-
�yMy�R���N�V�����z2026�ǃR�X�p�Q�[�~���OPC�i�C���e���j
���i.com�}�K�W��
���ڃg�s�b�N�X



�i�J�����j

�f�W�^�����J����
�i�ŋ�3�N�ȓ��̔����E�o�^�j




