位相差AFの位相差って何を指しているのでしょうか?位相の差ということなのでしょうが、その位相というのが分かりません。
すみませんがどなたかご教示いただけると幸いです。
書込番号:20056837
![]() 2点
2点
>アナスチグマートさん
テレコンやAFやと質問していますが、
「写真学校」でも行かれた方が無難かと思います!!
書込番号:20056879
![]() 2点
2点
アナスチグマートさん お早うございます。 googleしました。
AF方式の違い(位相差検出式とコントラスト検出式の違い)
http://www.antaresdigicame.org/photo_gallery/camera/camera85.html
位相差AFの位相差って何を指しているのでしょうか? ( google )
https://www.google.co.jp/search?sourceid=navclient&hl=ja&ie=UTF-8&rlz=1T4GUEA_jaJP611JP611&q=%e4%bd%8d%e7%9b%b8%e5%b7%aeAF%e3%81%ae%e4%bd%8d%e7%9b%b8%e5%b7%ae%e3%81%a3%e3%81%a6%e4%bd%95%e3%82%92%e6%8c%87%e3%81%97%e3%81%a6%e3%81%84%e3%82%8b%e3%81%ae%e3%81%a7%e3%81%97%e3%82%87%e3%81%86%e3%81%8b%ef%bc%9f
書込番号:20056887
![]() 4点
4点
アナスチグマートさん こんにちは
http://detail.chiebukuro.yahoo.co.jp/qa/question_detail/q1154382466
上のサイトを見ると 位相は 距離や角度に関係ある言葉のようですし 下の位相差AFの説明を見ると 結像間隔の距離情報を使っているようですので 位相という言葉を使っているように思います。
http://camera.itmedia.co.jp/dc/articles/1009/14/news026.html
書込番号:20056991
![]() 1点
1点
例えばスレ主さんが飲み過ぎて酔っ払った挙げ句千鳥足になり
道路のセンターラインを中心として5秒おきに右の側溝、左の側溝と
なかなか落ちずにフラフラ移動しているとしたとき
その時々でスレ主さんのいる場所が「位相」になります
5秒前と現在では位相が正反対になりますね
これがいわば位相差って事になると思います
位相差AFはセパレータで分光した光を対になるラインセンサでそれぞれ読み取り
波形にして、その波のズレを読み取る仕組みです
ピントがずれていれば各々のセンサが検出する波形は位相が違いますから
その位相差を検出する、という意味でしょう
ズレの方向で前ピン後ピンがわかりますし
利用する光束で検出できるズレ量もかわります
F2.8なら僅かなズレも検出できますが、大きなズレはわかりません
F5.6なら大きなズレも検出しやすいですが、僅かなズレはわかりません
顕微鏡で
倍率上げると全体が見えない
倍率下げると個々が見えない
そんな感じ?
じゃないでしょうか
書込番号:20056998
![]() 13点
13点
アナスチグマートさん
ネットで、検索!
書込番号:20057078 スマートフォンサイトからの書き込み
![]() 0点
0点
 |
 |
|---|---|
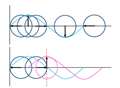
上段が、「位相」のイメージ・・・下段が「位相差」 |
位相差AF=視差のイメージ |
こんにちは♪
アナスチグマートさんにレス付けるの怖いな〜〜(^^;;;《笑
文系出身なんで・・・数学・物理は赤点君と言う事で・・・(笑
なんか・・・最近アハト・アハトさんの後追いばかりなんですけど(^^;;;(^^;;;(^^;;;(爆
位相=ある「正弦波」の波の位置だそうで・・・私は、上の図のように理解しています(^^;;;(^^;;;(^^;;;
まあ・・・「時計の針の位置(角度??ラジアン??)」と言う事です。
この時計の針の位置ズレが・・・「位相差」になります。。。
まあ・・・カメラのオートフォーカスの場合・・・具体的には光の波って事になるでしょうか??
位相差AFの原理は・・・
http://web.canon.jp/Camera-muse/tech/report/2011/09/
↑このキヤノンさんのページが分かりやすいと思います♪
個人的には・・・「位相差」と言うより・・・「視差」と考えた方が、オートフォーカスの仕組みは分かりやすい気がします(^^;;;
カメラのオートフォーカスを「擬人的」に考えるならば??
目の前に・・・人差し指一本立てて・・・その指より遠くを眺めると。。。
指が2本に見えますね??(^^;;;・・・これが「視差」です。
ソコから・・・目のピントを指に持ってくると・・・1本に重なります。。。
↑コレと同じ事を行ってると言う事で。。。
こんな感じでどーでしょ??(^^;;;
書込番号:20057163
![]() 5点
5点
みなさんすばやい回答ありがとうございます。
>おかめ@桓武平氏さん
教えてくれるんですかね?
>BRDさん
リンクありがとうございます。
すみませんがリンク先からは知りたいことが分かりませんでした。
>もとラボマン 2さん
リンクありがとうございます。
すみませんがリンク先からは知りたいことが分かりませんでした。
>アハト・アハトさん
詳しい説明ありがとうございます。
ラインセンサーで得られた波形の位置情報が位相、という認識でよろしいでしょうか。
>nightbearさん
検索しましたがわかりませんでした。
>#4001さん
詳しい説明ありがとうございます。
知りたかったのはAFの原理ではなく、なぜ位相という分かりにくい言葉をわざわざ使うのかを知りたかったのです。
お手間を取らせてすみません。
書込番号:20057257
![]() 2点
2点
アナスチグマートさん
そうなん?!
書込番号:20057263 スマートフォンサイトからの書き込み
![]() 0点
0点
みんなはぐらかさないでちゃんと教えろよ
音の世界の位相という概念を持ち込んでいます。
2本のラインCCDの明暗分布をグラフ(音の波形のようなもの)ととらえると
似たような明暗パターンがあるはず(同じ被写体に向いていれば)で
そのパターンの遅れ進み(左右のスピーカーなどで)を位相差と呼びます。
実際には時刻ではなく
ラインCCD上の位置なので
音の世界の位相という概念で表現するのは
どうかとも思いますが
慣例です。
(レンジファインダーを位相差MFとは言わんもんな)
2つのCCD上の関数を引き算して積分すると
正負が前ピン後ろピンを示し
そのままモーターへの駆動電圧とすれば
サーボ回路が構成されます。
書込番号:20057268
![]() 6点
6点
昔から、この用語の使い方は不適切だと思っています。
書込番号:20057273
![]() 1点
1点
そうですね 視差検知 が適切かも
ラインCCDが長ければ 静止状態でピンずれ量が求められますがが
短いCCDでは迷ったり、縞模様を誤認することが多いです。
その場合、初動で微小にピン位置を繰り出して
検知誤差が広がるか、狭まるかを計測することと組み合わされます。
書込番号:20057297
![]() 3点
3点
『位相差AF』の『位相』とはAFセンサ(ラインセンサ)上の輝度を指し、『位相差』は一対のAFセンサ上での輝度座標の相対的な差分
を指します。
センサ上での輝度変化が波のように見えるので『位相』と付いていますが、実際の光(=波)の位相の差ではありません。
書込番号:20057309
![]() 1点
1点
>ひろ君ひろ君さん
>ラインCCD上の位置
これが位相ということなのでしょうか。光も波なので、それの位相なのかと勘違いしていたみたいです。
視差検知センサー、ならイメージしやすいです。合ってるのかな?
>沖縄に雪が降ったさん
なんて呼んだらいいですかね。
書込番号:20057312
![]() 0点
0点
>つるピカードさん
ご説明ありがとうございます。これなら納得がいく感じです。
書込番号:20057333
![]() 0点
0点
付け加えるなら国語的には「位相」って特定の領域だけで使われる言葉ではなく
わりと汎用的な言葉ですから、そんなに深く考えないでいいんじゃないですかね
ぶっちゃけ言えば
「各々の変化のなかで同じ評価軸から見たときの各々の数値」
みたいなもんなんですかね
評価軸は時間であったり多寡であったり
数値は位置であったりエネルギー量であったり
位相差AFなら同じ像から分光されてセンサで読み取られた波形でしょうし
エンジンのクランクならクランク軸からのクランクピン位置
なんなら
全宇宙と小宇宙のなかでボクとアナタの位相
なんてわけのわからない言い回しもできるし(笑)
他にも位相って使う言葉は結構あると思いますし
通俗的には明快に「位相ってなんぞや」とは言えないと思いますよ
書込番号:20057435
![]() 4点
4点
爆発間隔や
書込番号:20057448 スマートフォンサイトからの書き込み
![]() 1点
1点
>アハト・アハトさん
コメントありがとうございます。
あまり難しく考えるな、ということですね。ただどうしても気になってしまうもので・・・
たとえば、
位相差がずれている→2つのAFラインセンサーの波形の位置(位相)がお互い基準からずれている→ピンボケしている
位相差が合っている→2つのAFラインセンサーの波形の位置(位相)がお互い基準と一致している→ピントが合っている。
という認識でよいですかね。
書込番号:20057575
![]() 0点
0点
再び、こんにちは♪
たはは・・・やっぱり(^^;;;
>位相差がずれている→2つのAFラインセンサーの波形の位置(位相)がお互い基準からずれている→ピンボケしている
>位相差が合っている→2つのAFラインセンサーの波形の位置(位相)がお互い基準と一致している→ピントが合っている。
↑はい、この認識で良いと思います。
先ほどのレスのキヤノンさんのページに書いてある図が分かりやすいと思います♪
>ひろ君ひろ君さん
私も、最初はオーディオの「位相」をイメージしたんですけど・・・(^^;;;
カメラの「位相」には、ドーしても「時間軸」がイメージできなかったモンで・・・ズレをドー説明してよいやら??(^^;;;
なので・・・キヤノンさんのページがわかりやすいかな??・・・と??(^^;;;(一応「波形」で描いてあるし♪)
書込番号:20057619
![]() 1点
1点
>#4001さん
いつも丁寧な解説ありがとうございます。
キヤノンさんのページは参考にさせていただきました。
認識はあってるで良いのですね。ありがとうございます。
位相差AFって名前は分かりにくいですね。でも視差AFでもなんか違う気がしますし・・・やっぱり位相差という言葉になってしまうんですかね。
書込番号:20057700
![]() 0点
0点
>アナスチグマートさん
>> 位相差AFって名前は分かりにくいですね。
>> でも視差AFでもなんか違う気がしますし・・・やっぱり位相差という言葉になってしまうんですかね。
開発された方に聞いて見るのもありだと思います。
または、最寄りの図書館で調べて見るのもありだと思います。
書込番号:20057731
![]() 0点
0点
「二つ以上の存在を共通の評価軸において相関で示される事柄」の方がいいのかな
『位相』って言葉は物理学でのみ使うべし、なんて法律あるわけじゃないし
位相差AFで別に違和感はないと思うけどなあ
うまく示してるんじゃないですかね
英語では"phase difference detection autofocus"ですから
「位相差検出AF」、そのまんまですね
視差ってもセンサは視覚的にものを見てるわけじゃないですから
むしろ本質から遠ざかってしまう気もします^^;
逆にMFカメラのスプリットプリズムがズバリ視差認識ではないでしょうか
>位相差がずれている→
>位相差が合っている→
理解は正しいと思いますが、あえて言葉尻をとれば
ずれるのは「位相」であって「位相差」はズレの量です
仮に対になる位相差センサを各々AとBにすれば
AとBの波形がずれている=位相差がある=ピントがずれている
AとBの波形が一致している=位相差がない・同位相(同相)=ピントがあっている
になるかと思います
書込番号:20057770
![]() 2点
2点
>おかめ@桓武平氏さん
技術者の方と話ができれば一番なのですが・・・そういう窓口ってあるんですかね。
>アハト・アハトさん
詳しい解説ありがとうございます。
これまでの皆さんのコメントから、なぜ位相差AFと呼ばれるのかは理解できました(のつもりです)
ラインセンサーの波形を波と捉えて(波形ですから波で当たり前なのですが)、その波形のことを位相と呼んでいると。
位相差AFは位相の差分(位相差)を計算してピントを合わせる、ということですね。
書込番号:20057797
![]() 0点
0点
>アナスチグマートさん
>なんて呼んだらいいですかね。
この際、公募したらどうでしょう?
書込番号:20057829
![]() 1点
1点
>沖縄に雪が降ったさん
面白いですね。でもこれだけ言葉が普及してしまうともう無理かもしれませんね。
書込番号:20057846
![]() 1点
1点
>位相差AFは位相の差分(位相差)を計算してピントを合わせる、ということですね。
元ニコンの技術者が書いた本によると。位相差AFの原理とは、レンズの右端から入ってくるコントラストが像面の中央にあれば合焦、左側にあると後ピン、右側にあると前ピンとなるのだそうです。
左右または上下二セットあるのはピントの合った位置を確認するためと書かれていますが、想像が付きませんでした。確かにキャノンの説明図でも片方だけででも機能するように見えます。
実際にレンズの端から入ってくるコントラストを特定するのはセパレートレンズと言うことになるのですね。
この原理のため、位相差AFはレンズの球面収差の影響を受けるそうです。中央と周辺のピント位置が異なるレンズでf5.6用とf2.8用の位相差AFのピントの位置が違うなんてことが発生するのですね。
この球面収差によるピント差は、レンズに備えられたメモリーに記録され、レンズの駆動時に、その分をオフセットして合わせることになります。
キャノンの窓口担当者に問うた限りでは、二組ある理由を説明できませんでした。まぁ、知らなければ写真が撮れないわけではありませんから、調査は、そこまでになっていますが。
書込番号:20057882
![]() 1点
1点
音のようにテイラ展開できないものに
位相同相は使いたくないかも
ラインCCDはコピー機のセンサのように
一次元で見ています。
シマ模様ですが
書込番号:20057982
![]() 1点
1点
英語の"phase"を"位相"と訳してしまったので
そうなったんでしょうね。
>phase
>1)「位相」規則的に正しく繰り返される現象(周期的な量)のある任意の起点に対する相対的な位置.
>周期的な電気信号は,通常,1周期を360度として表現するので,その端数,例えば半周期の位相のずれは
>位相が180度ずれたという表現をする. 2)「段階」ある現象のライフサイクルにおいて,
>他とは区別される部分の経時的な段階.
フェーズ・コントラスト、そのままでも良かったような気がします。
書込番号:20058030
![]() 3点
3点
>デローザさん
詳細な解説ありがとうございます。
>ひろ君ひろ君さん
テーラー展開、が何か関係するのでしょうか。
>hotmanさん
フェーズをあわせる、という言い方をしますよね。
確かに位相というよりフェーズのままの方がイメージしやすい感じがします。
書込番号:20058691
![]() 0点
0点
位相は位置どころか、時刻さでもなく
カクソクドさですから
そもそも周期信号であることを保証されていない
影像信号につかうんてね
書込番号:20058926
![]() 1点
1点
>ひろ君ひろ君さん
ん・・・・なんだか難しくなってきました。
私のイメージは、2つのラインセンサーで波形が同じで位置が異なる波形A,A'があったとき、この2つの波形の位置の差が位相差だと理解していたのですが、どうでしょうか。
書込番号:20058984
![]() 0点
0点
音響では 2経路の伝達があると
ちゃんと同相(0度)で伝わっているか逆相(180度)になっていないかが求められます。
(右スピーカーと左スピーカーが逆相だと気持ち悪い)
でも伝達経路は完璧ではないので
マイナス何度とかマイナス何度になることがあって
その微調整が位相です
エフェクタ済み音声と原音を混ぜたりするときに
エフェクト音がどれだけ位相をもっているかが問題視される
位相の調整はデレイ(遅延)をもって行われますが
その遅延量は絶対時間で
その 位相 = 遅延時間 ÷ 音声周期 となります。
でも音高周波数(とか倍音成分)は一定という前提だが
AFセンサに入射する縞模様はAFセンサを外れた部位でも
同周期で繰り返している保障はありません。
レンズのコントラスト再現評価
(テストパターンチャート)において
MTF空間周波数で測定評価されてますが
じゃあ、縞模様分の誤差をもって重複させても
何の意味を持たないどころか
AFセンサーでは誤認識として評価されます。
書込番号:20059340
![]() 1点
1点
くわしく説明すれば「位相差」もありかもしれません。しかし、カメラは光学機器です。「位相」「位相差」というと「光波の位相」「光波の位相差」をまずイメージするのが常識的な人間の感覚でしょう。そこが問題なのです。たとえ説明はつくにしても、常識的な人間の誤解を誘発するような名前は望ましくありません。
聞き慣れない横文字言葉を並べで、さもありがたいものであるように思わせたり、虚仮威しにして相手を煙に巻いたりするのが、わたしは大嫌いです(たまに、敵対関係にある人間には使いますがww)。この「位相差」を使い出した経緯にも、そういうような魂胆があったように思われてなりません。
書込番号:20059697
![]() 1点
1点
日本語に無い言葉をそのままカタカナで外来語として使うのは、
日本語の大きなメリットだと思いますけどね。
上手く訳せるんならその方が良いですけれど、
カメラやレンズなんてそのまま使っていますよね。
"位相" "位相差" なんて一般人が日常会話で普通に使う言葉じゃないだろうし、
それを考えれば、現状"位相"で十分なのでしょう。
もしもっと頻繁に使うようになるなら、原語に戻るか
もっと適切な言葉が出てくるような、そんな気がしますね。
ひろ君ひろ君さん
リニアフェーズスピーカーの時代が懐かしいですね。
ウーハー・スコーカーのセンターコーン(センタードーム?)の位置をトィーイター
に合わせても、ウーハー振動の大部分はそこじゃない・・・とか
散々悩んだ経験があります。
書込番号:20059740
![]() 2点
2点
>ひろ君ひろ君さん
丁寧なご説明ありがとうございます。オーディオに詳しくないのでピンとこないのですが、仰りたいことはなんとなく伝わってきました。
ただAFセンサーで見ているのは実像であり、そこには光の位相情報は失われている(はず)と思うので、位相差という言葉自体にはやや抵抗があります。もはやどうでもいいという感じもしてきましたが(笑)
>沖縄に雪が降ったさん
まあそんなことおっしゃらずに。
>hotmanさん
もともとはハネウェルの特許ですから英語のはずですよね。特許になんて書いてあったのか知りたいところです。
書込番号:20059795
![]() 0点
0点
> もともとはハネウェルの特許ですから英語のはずですよね。特許になんて書いてあったのか知りたいところです。
phase detectionかphase matchingのどちらかでしょうね。
LensRentals.com - How Autofocus (Often) Works
https://www.lensrentals.com/blog/2010/07/how-autofocus-often-works/
> The basic design of phase detection (AKA phase matching) autofocus was originated by Honeywell in the 1970,
位相差AFは原理としては単純ですが、実現する仕組みをよく考え出したなと思います。
書込番号:20060083
![]()
![]() 1点
1点
>もともとはハネウェルの特許ですから
特許が書かれているわけではありませんが、ハネウェル社TCLとミノルタ訴訟について、小倉磐夫の記事が詳しいですね(「現代のカメラとレンズ技術」写真工業出版社)。
TCLは、上下の光線のピントがずれると入れ替わることを検出して測距を行うものらしい(執筆当時は公開されておらず、サンプルを見て簡単な資料を入手するにも85,000ドル当時が必要なので想像している)と分析しています。
このとき、走査している上下のCCDの出力がピントがずれると出力電力の位相がズレると書いてあります。この辺が位相差の語源でしょう。
撮れる写真に貢献しないので、詳しくは見ておりません。詳しく知りたければ、古本屋にあるかも知れませんので探してみてはどうでしょう。
なお、ミノルタ、ハネウェル訴訟でライカが持つ特許の有効性がミノルタの敗因となったと書かれています。ライカも巻き込まれていたようですね。
書込番号:20060143
![]()
![]() 2点
2点
>じよんすみすさん
>デローザさん
ありがとうございました。ようやく理解できたような気がします。
> The basic design of phase detection (AKA phase matching) autofocus was originated by Honeywell in the 1970,
>走査している上下のCCDの出力がピントがずれると出力電力の位相がズレると書いてあります。
つまりラインCCDからの信号をオシロスコープのような機械で見てみると、ピントをずらしたときに波形が左右にずれる様子が、たとえばサイン波の位相がずれたような挙動と一緒なので、位相と呼んでいるんだと理解しました。
機構はシンプル?ですが、これをカメラに組み込むのは大変だったろうと思います。
特許も位相(phase)をつかっているところがポイントなわけですね。
よくわかりました。みなさんありがとうございました。
書込番号:20060604
![]() 0点
0点
アナスチグマートさん
いつもお世話になっています。
何故、位相差AFと呼ぶかに関しては、(1)のブログを読むと滅茶苦茶スッキリすると思います。
位相差AFのラインセンサーからの出力は、(2)の図の通りだと思いますし、殆どの方はこの図のようなイメージを持たれていると思います。しかし、(1)ではラインセンサーからの出力は、エッジを検出する為の「輝度の微分」と説明しています。微分されている所がミソです。そして図6にて「2つの像のエッジ位置の差=位相差を検出していることから、「位相差AF」の呼び名があるのだと思います。」とコメントなさっています。
図6の微分信号は波のように見えますから、エッジ=微分のピークはある位相に位置し、2つのラインセンサーから得られる、2つのエッジ(=微分のピークはある位相)の差を、位相差と呼ぶのは、自然な事に思えます。
(1) 位相差AFのエッジ検出、センサーが2個1組の理由
http://lglink.blog81.fc2.com/blog-entry-1034.html
(2) キヤノンの解説
http://web.canon.jp/Camera-muse/tech/report/2011/09/
【蛇足】
以前、素朴な疑問をした事があります。当時も良く分かっていなかったし、時間が経ってしまったので益々分からなくなっています。
なお、以下のスレでは途中まで、霧G☆彡。さんのプロフィールを全く存じ上げず、大変失礼なコメントをしてしまいました。穴があったら入りたい気分は未だに変わりません。
・中央測距点のみ開放F8対応の仕組みを教えて下さい
http://bbs.kakaku.com/bbs/K0000347675/SortID=17229252/
書込番号:20060659
![]() 1点
1点
あ、ごめん
この特許係争のころなら
まだラインCCDなんて高値の華で
たしかミラーを回転させてSPD(単体光素子)に導いていたはず
そうすると時間の関数になるし、オシロで観測も理にかなってる
2ミラー、2SPDなら2事象観測になるし
位相という文言が適切か否かは難しいところですが
遅延時間を求めるということですので
当業者的には正しかったんでしょうね
書込番号:20060958
![]() 1点
1点
アナスチグマートさん
位相に関する語感をちょっと考えてみました。語感なので、辞書的な意味とは異なりますが、ご容赦下さい。
まず、英語だと、AF方式としてはphase detectionを用います。
・Phase detection(Autofocus)
https://en.wikipedia.org/wiki/Autofocus#Phase_detection
一方、正弦波では「In sinusoidal functions or in waves "phase" has two different, but closely related, meanings. One is the initial angle of a sinusoidal function at its origin and is sometimes called phase offset or phase difference. Another usage is the fraction of the wave cycle that has elapsed relative to the origin.」と断った上で、
「Phase difference is the difference, expressed in degrees or time, between two waves having the same frequency and referenced to the same point in time.」
としています。
・Phase difference(Phase(waves)) ↓ リンクが直接、貼れないので、「Phase (waves)」→「Phase_difference」と選んで下さい。
https://en.wikipedia.org/wiki/Phase
正弦波の場合は、ご存知のように、オイラーの公式を用いると、位相差は虚部になります→三角関数でなく指数関数で扱えるようになります。こうなると、人によるでしょうが、重要なのは虚部なので、波から位相差だけ取り出して扱っているような感覚になります。
・複素数による表現(位相)
https://ja.wikipedia.org/wiki/%E4%BD%8D%E7%9B%B8#.E8.A4.87.E7.B4.A0.E6.95.B0.E3.81.AB.E3.82.88.E3.82.8B.E8.A1.A8.E7.8F.BE
私達の身近な所では、位相板は良く使われる用語です。例えば、λ/4板、λ/2板等。ここで注意したいのが、自然光は、波長、位相、強度等が様々な正弦波の集合である事です。λ/4板、λ/2板等は、勿論、λを中心波長として設計されているはずですが、円偏光フィルターを購入したり使用する際、中心波長λの事は意識していないと思います。逆に、カメラ用レンズやメガネ用レンズの反射防止膜の膜厚は4/(λ・n)です。1層コートでは1つのλ近傍でしか反射防止効果がないので、コートを多層化する事により幅広い波長で反射防止効果が得られるように設計されています。
・反射防止層の設計
http://kinoufilm.nof.co.jp/articles/article3-2.html
以上で見て来たように、位相を考える場合、元々の正弦波を離れ、位相だけで考える場合が少なくありません。また、この世に存在する波には、時間軸の波だけでなく空間軸の波もありますし、さらにフーリエ級数展開を思い浮かべれば、この世に存在する波の位相だけに着目し、位相だけ取り出して考えると、これまでの様々な知見が活かせるように思います。そして注意したいのは、位相が重要なのではなく、位相差が重要と言う点です。
と言う事で、位相差AFで「位相」と言う用語を使用するのはOKと思いますし、detectionがdifferenceに置き換わったとしても、位相差AFと言う技術に対するイメージが変容する訳もないように思います。
書込番号:20061315
![]() 1点
1点
>ミスター・スコップさん
丁寧な解説ありがとうございます。
私にはそんな長文を書く能力がありませんので、簡単なお返事でお許し下さい。
センサーが2つある理由ですが、こっちのサイトで説明されている理由じゃないかと思うのですが、どうでしょうか。
http://www.photosepia.jp/focussing_tech.html
位相に対するイメージについてもありがとうございます。私の頭の理解が追いつかないので、ゆっくり整理して読ませていただきます。
重ね重ねありがとうございます。
書込番号:20061629
![]() 1点
1点
>ひろ君ひろ君さん
このころはラインCCDはなかったんですね。
特許見れないんですが、センサーは1個でも位相差検出はできたんじゃないでしょうか。
原理的には1個でもいいような気がしているので。(実用的には2個必要)
書込番号:20061655
![]() 0点
0点
アナスチグマートさん
レス、ありがとうございます。
> センサーが2つある理由ですが、こっちのサイトで説明されている理由じゃないかと思うのですが、どうでしょうか。
アナスチグマートさんが引用なさっている記事の方が単純明快ですね!私が引用したブログ記事では、被写体が点から面に変わった時に、横への移動が同時に生じているので、ブログを書かれた方は、ご存じだったが省いたか、混同して扱ったかのどちらかのように思われます。ただ、ブログ記事の記述そのものは間違っていないので、ご参考にはなると思います。
以下は、同じ方のブログの続きで、クロスセンサーの必要性等の検討を行っています。ご参考まで。
・ピントが合わない・遅い・不正確〜一眼レフ、位相差AFの問題点
http://lglink.blog81.fc2.com/blog-entry-1040.html
書込番号:20061735
![]() 1点
1点
>アナスチグマートさん
> センサーが2つある理由ですが、こっちのサイトで説明されている理由じゃないかと思うのですが、どうでしょうか。
> http://www.photosepia.jp/focussing_tech.html
上記のサイトで説明されているカメラを2台使うフォーカス方法は、レンジファインダーで使われている方法です。
原理が違いますので、これを位相差AFの説明に用いるのは不適切だろうと思います。
書込番号:20061889
![]() 1点
1点
アナスチグマートさん
[20061315]の訂正です。ド超お恥ずかしい限りです!!
【誤】オイラーの公式を用いると、位相差は虚部になります
【正】オイラーの公式を用いると、振幅、位相は、実部と虚部とから求められます。
(補足) 三角関数より指数関数の方が微積分等で扱いやすいので、正弦波を指数関数で扱い、振幅と位相が必要な場合は、以下により求められます。
・F(ω) の大きさと位相について
http://okawa-denshi.jp/techdoc/2-2-8Fwtoisou.htm
位相差AFで(ライン)センサーが2つ必要な理由ですが、じよんすみすさんがご指摘のようにアナスチグマートさんが引用なさった記事は不適切でした。申し訳ありません。
もう一度、以下のブログ記事をご覧下さい。被写体を点(今は分かり易く、点光源とします)とした場合の図2〜4を見て頂くと分かりますが、合焦の場合は、被写体の位置に依らず、点光源による輝点はa0に位置します。この為、図2〜4においては、センサーは1つで十分です。これに対し、アナスチグマートさんが引用なさった記事では、被写体の位置に依り、合焦の場合の輝点がズレます。従って、そもそも1つのセンサーでは測距は無理で、2つ組み合わせて三角測量の原理にて測距する事になります。
問題は、点光源が図2〜4の上下にズレた時です。この時は、合焦の場合、点光源による輝点は図5の黄緑に相当するはずなので、合焦の位置は、a0からe0だけズレます。しかし、図6の下にある式1と式2のように扱えば、e0を消去出来ます。つまり、e0を消去する為、2つのラインセンサーが必要となります。
ただ、この説明もちょっと可笑しくて、位相差AFの場合、測距点が決まっていますよね。従って、点光源が図2〜4の上下にズレた時は、中央の測距点から外れ、図5の黄緑に対応する測距点、つまり別のラインセンサーで測定すれば、合焦は必ずそのラインセンサーのa0に位置するはずです。なので、点光源が図2〜4の上下にズレた時は考えなくていい(被写体が点ならラインセンサーは1つで十分)と言うのが、今の私の考えです。
ブログ記事では、図5から被写体は点ではなく面(と言っても、実際には、横検出あるいは縦検出に対応した1次元(線)です)に変更されています。ブログ記事では、面の場合は輝度から被写体を検出するのは困難と考え、エッジ検出(具体的には、輝度の微分による)と言う方向に進んでいます。エッジ検出とは輝度の変化が最も大きい箇所を被写体と見做すと言う手法なので、被写体の特定がエッジ検出では不適当なら、ラインセンサーの輝度信号をそのまま利用する場合も含め、(微分ではない)別の検出方法に委ねてもOKと思います。
(1) 位相差AFのエッジ検出、センサーが2個1組の理由
http://lglink.blog81.fc2.com/blog-entry-1034.html
書込番号:20062099
![]() 2点
2点
アナスチグマートさん
[20061315]の位相の語感に補足しようと思ったら、誤記がありました。訂正させて頂きます。何度も何度もスミマセン!!
【誤】カメラ用レンズやメガネ用レンズの反射防止膜の膜厚は4/(λ・n)です。
【正】カメラ用レンズやメガネ用レンズの反射防止膜の膜厚はλ/(4・n)です。
肝心の補足です。[20061315]で、
・位相板。例:λ/4板、λ/2板
・反射防止膜の膜厚:λ/(4・n)
と書きましたが、位相板の板厚と反射防止膜の膜厚とは、オーダー(桁数)が異なります。
位相板は光学的異方性、つまり、常光の感じる屈折率noと異常光の感じる屈折率neとの差「(例えば、水晶の)屈折率差ne−no=0.0092」を利用しています。屈折率差により常光と異常光とには位相差が生じますが、λ=550nmのλ/4板を得るには、板厚は約15μmとなります。
一方、反射防止膜では、反射防止膜に透過せず反射する光と、反射防止膜を透過し次の物質(単層コートなら、レンズ)との界面で反射する光との位相差がλ/2ならば打ち消し合います。反射防止膜を透過し次の物質(単層コートなら、レンズ)との界面で反射する光は、反射防止膜を往復するので、反射防止膜の膜厚はλ/4の位相差となり、反射防止膜の屈折率がnの場合、反射防止膜の膜厚はλ/(4・n)となります。仮にλ=550nm、n=1.4とすると、反射防止膜の膜厚は約98nmとなります。
従って、位相板の板厚と反射防止膜の膜厚とは、大雑把には、オーダー(桁数)が2〜3も異なる事になります。
・波長板(=位相板)とは
http://www.chuo.co.jp/core_sys/images/main/pdf/38GC0994.pdf
【再掲】
・反射防止層の設計
http://kinoufilm.nof.co.jp/articles/article3-2.html
[勘違いのお詫び]
上の「反射防止層の設計」の図を見ると、私のコメント「1層コートでは1つのλ近傍でしか反射防止効果がない」は誤りで、1層コートの反射率はブロードで、なおかつ高めの数値となっています。どうもすみませんでした。
書込番号:20062392
![]() 1点
1点
>じよんすみすさん
>これを位相差AFの説明に用いるのは不適切だろうと思います。
図ではカメラ2つですが、実際にはこのカメラの位置にはラインセンサーがくるので、あながち間違っているとはいえないと思います。
>ミスター・スコップさん
またまたお詳しい説明ありがとうございます。
ブログ、ちょっと難しいので、ゆっくり読ませていただきます。
書込番号:20063837
![]() 1点
1点
アナスチグマートさん、みなさん、
たいへん勉強になりました。
あとですぐ探せるように、ひとことお礼を入れておきます。
書込番号:20070868
![]() 2点
2点
>南米猫又さん
コメントありがとうございます。私もこのスレとみなさんのおかげでいろいろ勉強になりました。
まだ消化不良のところがありますので、じっくり読んでいる最中です。
南米猫又さんも疑問点などありましたら遠慮なくご質問お願いします。
みなさんのためにもなりますので。
書込番号:20072499
![]() 1点
1点
>デローザさん
> ピントがずれると出力電力の位相がズレると書いてあります。
なるほど、やっと腑に落ちる説明が聞けました。
ただでも、、、ではありますが、
書込番号:20072715
![]() 1点
1点
センサの話で言えば
ラインセンサはフォトダイオードの集まりですから(アレイ)
対になるラインセンサの中の各々のフォトダイオード(光検出)の値を読み出した配列
例えば
光を検出すれば真(True)、検出出来ない場合は偽(False)を返すフォトダイオードが
7つで構成されたラインセンサ(フォトダイオードアレイ)が二つ対に配置されて
それぞれにスプリッタで分光された像が投影されるとした場合
像は白地の中央に黒い線があるカンタンなパターンとすれば
ジャスピンならば両方のラインセンサとも真真真偽真真真の配列を返し
外れていれば
Aのセンサは真偽真真真真真を返し
Bのセンサは真真真真真偽真を返す
ABの配列を比較すると真偽真真真偽真となり偽が二つあるのでピントが
外れているのがわかります
一つの像を対象に分光しているので、ABそれぞれのズレ量は±の等価です
つまりジャスピン位置はABそれぞれの偽の中央位置というのがわかります
ジャスピン位置の偽とピンずれの偽は±2だけオフセットしていて
このオフセット量がズレ量と計算でき、レンズの駆動量が算出できます
そしてAのセンサが返す偽の位置がジャスピン位置より左なら前ピン
右にあれば後ピン、というようにズレ方向も検出できますね
情報処理という意味ではそんな感じで処理してるんじゃないでしょうか
視覚的に置き換えれば___Л___がジャスピン
_Л_____と_____Л_がピンずれ
波形として考えるとイメージしやすいですよね
それと
ラインセンサは二つないと原理的に検出は無理だと思いますよ
まあ
長〜いラインセンサを二分割して使うとすれば、確かに一つで足りますけど
概念的にはそれって二つになるんじゃないかと。
書込番号:20076042
![]() 1点
1点
アハト・アハトさん
何となく、誤解なさっているような気がしないでもありません。
逆に私が誤解していたら、お詫びのしようもありません。失礼をお許し下さい。
(1) ラインセンサーの配置
> 長〜いラインセンサを二分割して使うとすれば、確かに一つで足りますけど
当然ながら、2本のラインセンサーを繋いだら1本と言う発想はどなたも持っていないと思います。
実際の製品では、以下のようになっています。従って通常は、「長〜いラインセンサ」と言う発想がそもそも出て来ないと思うのですが‥。
ラインセンサーの配置と測距点は、「2本で1組」対「1点」に対応しています。それぞれのラインセンサーは、複数の測距点用ラインセンサーを1本に纏めた場合があり、それぞれの測距点に対し、1本(に見える)ラインセンサーを分割にして利用しています。
[1DX、5D3の例。「F2.8対応・クロス測距」の関係が分かり易いと思います]
・ラインセンサーの配置
http://dc.watch.impress.co.jp/img/dcw/docs/516/132/013.jpg
・測距点
http://dc.watch.impress.co.jp/img/dcw/docs/516/132/015.jpg
(2) 位相差AFの原理
> ラインセンサは二つないと原理的に検出は無理だと思いますよ
アハト・アハトさんが例に挙げた「像は白地の中央に黒い線があるカンタンなパターン」なら、1本のラインセンサーにて測距可能です。詳しくは、以下の「もう一度、以下のブログ記事をご覧下さい。」以降の被写体を点とした場合にご覧下さい。当然、引用したブログ記事を合わせてご覧下さい。被写体が点の場合は、合焦点は常にa0なので、ラインセンサーは1つで十分です。図5以降では、合焦点がa0からe0だけズレますが、e0は1本のラインセンサーだけでは把握出来ません。ラインセンサーを2本を1組とすると、e0は消去出来、測距可能となります。
http://bbs.kakaku.com/bbs/-/SortID=20056837/#20062099
書込番号:20076271
![]() 1点
1点
誤解してませんよ^^;
いろいろ深読みし過ぎじゃないですかね
書込番号:20076367
![]() 1点
1点
 |
 |
|---|---|
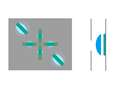
ピントがずれている |
ピントが合っている |
>アハト・アハトさん
> ラインセンサは二つないと原理的に検出は無理だと思いますよ
その通りです。
位相差AFの原理ですが、レンズの右側から来る光束が作る像とレンズの左側から来る光束が作る像が、ピントが合っていない場合はずれます。
このずれからレンズの合焦位置を計算で求めることが出来ます。
フォーカスを自動化するには、このずれをセンサーで検出してレンズを合焦位置へ動かせばいいわけです。
書込番号:20078753
![]() 1点
1点
じよんすみすさん、アハト・アハトさん
ブログ記事を信じ過ぎなのかもしれませんが、被写体が点なら、ラインセンサーは(被写体までの距離に依らず合焦点はa0で固定されているので)1本で測距可能(一発(1回のラインセンサー読み取りだけ)で合焦点を特定)と思っているのですが、間違っていますか?
被写体が面(*)になって始めて、合焦点はa0からe0だけずれます。1本のラインセンサーだけではe0は特定出来ませんが、2本のラインセンサーを組み合わせれば、e0は消去出来、測距可能(一発で合焦点を特定)となります。
お二人なら百も承知の事なので、書く事さえ憚れますが、コントラストAFがピーク位置(合焦点)を特定する為にピーク位置前後を往復しないといけないのに対し、位相差AFでは一発で合焦点を特定出来ます。
(*)
実際には、線として検出されますが、線には輝度分布が存在する必要があります。線に輝度分布が存在しない場合に備え、クロス測距が導入されています。
【再掲】
(1) 位相差AFのエッジ検出、センサーが2個1組の理由
http://lglink.blog81.fc2.com/blog-entry-1034.html
書込番号:20078881
![]() 1点
1点
補足です。
以下は、ブログ記事そのままなので、ブログ記事をお読み頂いているなら、スルーして下さい。
ブログ記事では後ピン、前ピンをそれぞれ、’、’’を用いて区別していますが、以下では省略します。符号も適宜、状況に合わせてお考え下さい。
【被写体が点の場合】 今は点光源とします。
2本のラインセンサー上では、ピントが合っていない場合、逆方向に、a0からΔ1だけ輝点がずれます。方向が逆なだけで、ズレ量はどちらもΔ1ですから、Δ1のズレを解消すれば(移動量を−Δ1とすれば)、合焦します。つまり1本のラインセンサーだけで測距可能です。
【被写体が面(*)の場合】
2本のラインセンサー上では、ピントが合っている場合、a0から、同方向にe0だけずれます。ピントが合っていない場合は、逆方向にΔ1だけずれます。従って、それぞれのラインセンサーでは、「±Δ1+e0」だけずれるので、e0が特定出来ない限り、1本のラインセンサーだけでは測距不可です。2本のラインセンサーを対で使用すれば、e0は消去出来、2本のラインセンサーのそれぞれのa0からのズレ量e1、e2(の差分を取る)だけで、移動量−Δ1が算出出来ます(式2、式4)。つまり、測距には2本のラインセンサーが必要となります。
(*)
実際には、線として検出されますが、線には輝度分布が存在する必要があります。線に輝度分布が存在しない場合に備え、クロス測距が導入されています。
書込番号:20079558
![]() 1点
1点
盛り上がってますね?
私の理解としては、中央1点AF に限定すると
・被写体が光軸上に点としてあるならラインセンサーは1本でいい。
・被写体が光軸から少しずれた位置にあるならラインセンサーは2本必要。
と思っています。
理由はミスター・スコップさんが述べた通りです。
被写体が光軸上にあるなら、真真偽真真真真真真を真真真真偽真真真真に持ってくればよいです。
被写体にピントがあっているけど光軸からずれている場合、真真偽真真真真真真となって、センサーにとってはピントがずれているように見えます。
これを防ぐために、もう片方の光束のラインセンサーを配置すると、真真偽真真真真真真になっているはずです。差分を取ると0なので、ピントはあっていることがわかります。
たぶんこんな感じじゃないかと理解しているのですが、どうですかね。
書込番号:20079954
![]() 1点
1点
「点なら」とのことですが
「点」をどう理解されているかはわかりませんけど
概念上の話でいいならセンサひとつでもズレ量検出は可能です
ただそれは現実ではありえませんし
まして「位相差」ではないです
「拝む」なら片手でも両手でもできますが
両手じゃないと「合掌」とはいいません
2つの位相の差し分を利用するから「位相差」ですよ
一つだけでは位相「差」は発生しません
私はこのスレッドは「位相差」のお話をしていると思っていますので
終始その観点から「原理的に2つ必要」と申し上げています
書込番号:20080150
![]() 1点
1点
>ミスター・スコップさん
特殊な条件下ではセンサーが一つでも測距が行えますが、引用されたブログでも一般的な条件ではセンサーは二つ必要という結論になっていると思います。
書込番号:20080155
![]() 1点
1点
基盤実装機の位置センサー(奥行)とかは1つですが
これは部品(被写体)に正対している前提なので
主要被写体がセンサーからはすに構えている可能性があるなら
2つ必要だと思います
書込番号:20080443
![]() 1点
1点
アナスチグマートさん、アハト・アハトさん、じよんすみすさん、ひろ君ひろ君さん
私の拙い見解に、コメント頂き、どうもありがとうございます。
アナスチグマートさん
私の言いたかった事を分かり易くご説明頂き、ありがとうございます。
ひろ君ひろ君さん
> 主要被写体がセンサーからはすに構えている可能性があるなら
> 2つ必要だと思います
このご説明は、私の見解に近いように感じたのですが、そう捉えてOKでしょうか?
アハト・アハトさん、じよんすみすさん
アハト・アハトさんやじよんすみすさんに限らないのですが、何故、2本のラインセンサーが必要かを、ブログ記事を除くと、ここでは具体的に納得出来る説明がなされていないと思っています。そもそも、ラインセンサーに基準点a0が存在する事をご存じない方(お二人の事ではありません)もおられるように感じています。繰り返しになりますが、2本のセンサーにおけるa0からのズレ量e1、e2は、同方向のズレe0と逆方向のズレΔ1の和なので、e1=e0+Δ1、e2=e0−Δ1となります。e0を消去し、ピントずれによる移動量Δ1を求めれば、一発で合焦に持っていけます。
勘違いだったら甚だ申し訳ないのですが、アハト・アハトさんのご説明は結論ありきになっていると思います。
> 2つの位相の差し分を利用するから「位相差」ですよ
> 一つだけでは位相「差」は発生しません
これでは、そもそも何故、AFに、「位相差」、つまり「位相」を利用しなければならないか、全く分かりません。
いい譬えでないかもしれませんが、「エアコン」を取り上げます。「2つの位相の差し分を利用するから「位相差」です」と言っているのは、「エアコンはエア・コンディショナーの略だから冷暖房が出来るんです」と言っているようなモノです。どちらの表現も(そうした機能を有している前提の)結論ありきの表現だと思います。もしエアコンで冷暖房が出来る理由を説明するなら、「熱媒体の気化熱および凝縮熱を利用したヒートポンプで、冷房時と暖房時には熱媒体の流れを逆向きにする」みたいな感じになると思います。「エアコンはエア・コンディショナーの略」と「2つの位相の差し分を利用するから位相差」とが、実際の仕組みに関して何も言及していない事はご納得頂けたでしょうか??
なお、アナスチグマートさんの最初のご質問「位相差AFのそもそも位相とは?」に対して、私は正確には答えられませんが、「位相」の語感に関して、以下で触れています。
[↓の一部に誤りがあります]
http://bbs.kakaku.com/bbs/-/SortID=20056837/#20061315
[↓の2つが↑の訂正です]
(「F(ω) の大きさと位相について」までの箇所)
http://bbs.kakaku.com/bbs/-/SortID=20056837/#20062099
(訂正及び補足です)
http://bbs.kakaku.com/bbs/-/SortID=20056837/#20062392
書込番号:20080516
![]() 1点
1点
たぶんラインCCDが高値のはなだった昔は
クレーム
周波数発生装置手段と、
その周波数発生手段の発生する周期電圧に応じた光路誘導手段と
前期光路誘導手段によって導かれた光量観測手段による出力電圧変動と
同周波数発生装置遮断を用いた
別の光路誘導手段によってつくられた別の出力電圧変動を用い、
もとの周波数発生装置の位相、
最初の出力電圧変動の位相、
別の出力電圧変動の位相と、
3位相を計測することにより光の交わり(ピント)位置を計測するピント検出装置
具体的には多角形回転ミラーです
書込番号:20081136
![]() 1点
1点
ミスター・スコップさん
>アハト・アハトさんのご説明は結論ありきになっていると思います。
ごめんなさい、エアコンの例えは何を仰りたいのか全くわかりませんし
何を以って「結論ありき」なのか?なぜそのような方向に話がずれるのか
サッパリ理解できません
失礼な言い方になるかもしれませんが
簡単なことをわざわざ難解に理解しようとしているというか
自分の見方以外では納得したくないだけというか・・・そんな風にみえます
書込番号:20081394
![]() 1点
1点
>アハト・アハトさん
センサーが2つ必要な理由は、1本では実用的なオートフォーカスは出来ないからです。
センサー1本では被写体を正確にレンズの光軸上に捕らえることが必須ですが、手持ちでは不可能です。
三脚を使ったとしても被写体をラインセンサーの1ピクセル程度の誤差で光軸上に捕らえることは、一眼レフの光学ファインダーでは不可能です。
ミラーレス一眼のMFアシストのような被写体の拡大表示が必要でしょう。
更に被写体はコントラストのはっきりした細い棒のような図形に限られます。
理論的に可能であっても、実用的ではありません。
書込番号:20081478
![]() 1点
1点
じよんすみすさん
ご説明、どうもありがとうございます。
アハト・アハトさん
気を悪くなさったら、申し訳ありません。多分、私以外の方からのご説明なら、ご納得頂けるとは思います。ただ、しつこいようですが、アハト・アハトさんのご発言を並べてみます。
[20076042] ← 私が誤解されているのでは?と最初にお尋ねした書き込みです。
> 像は白地の中央に黒い線があるカンタンなパターンとすれば
>
> ジャスピンならば両方のラインセンサとも真真真偽真真真の配列を返し
>
> 外れていれば
> Aのセンサは真偽真真真真真を返し
> Bのセンサは真真真真真偽真を返す
>
> ABの配列を比較すると真偽真真真偽真となり偽が二つあるのでピントが
> 外れているのがわかります
>
> 一つの像を対象に分光しているので、ABそれぞれのズレ量は±の等価です
> つまりジャスピン位置はABそれぞれの偽の中央位置というのがわかります
>
> ジャスピン位置の偽とピンずれの偽は±2だけオフセットしていて
> このオフセット量がズレ量と計算でき、レンズの駆動量が算出できます
ここまでのご説明は、ブログ記事の被写体を点とした場合と全く同一です。つまり、1つのラインセンサーだけで測距可能です。ご自身でも「ABそれぞれのズレ量は±の等価」「ジャスピン位置の偽とピンずれの偽は±2だけオフセット」とお書きになっていますから、プラスあるいはマイナスのラインセンサー1本だけで、「このオフセット量がズレ量と計算でき、レンズの駆動量が算出できます」事になります。繰り返しますが、ここでのご説明では、ラインセンサーは2本必要なく、1本で十分です。
[20080150]
> 「点なら」とのことですが
> 「点」をどう理解されているかはわかりませんけど
> 概念上の話でいいならセンサひとつでもズレ量検出は可能です
アハト・アハトさんの上記[20076042]がまさしく、「概念上の話」になります。
アハト・アハトさんがラインセンサーが2本必要だと仰っているのは、以下の箇所だと思います。
[20076042]
> ラインセンサは二つないと原理的に検出は無理だと思いますよ
[20080150]
> 終始その観点から「原理的に2つ必要」と申し上げています
用語の使い方としてキッチリとした決まりがある訳ではありませんが、「原理的に〜」と言った場合、発言者はその原理を少なくとも理解、なお言えば他者に説明出来ないといけないと、少なくとも私は思います。もし理解や説明が出来ていないなら、「原理的」は使わず、「個人的には〜だと思う」とか「○○の説明によると、〜」と言った形の発言の方が相応しいと思います。
[20081394]
> 自分の見方以外では納得したくないだけというか・・・そんな風にみえます
「自分の見方以外」と仰いますが、少なくとも、アハト・アハトさんがラインセンサーが2本必要とされる根拠(=自分(私の事)の見方以外)はお示しになっていないと思います。
私は自力では分からなかったので、ブログ記事を参考にしています。「原理的」でなく、被写体が面(ひろ君ひろ君さんやじよんすみすさんのご発言が、より正確な表現と思います)の場合には、2本のラインセンサーに同方向、しかも同じ量のズレe0が生じるため、2本のラインセンサーの基準点a0からのズレe1、e2は、e1=e0+Δ1、e2=e0−Δ1となるので、e0を消去する為、e1、e2の差分を取り、移動量Δ1を求める事は再三申し上げて来た通りです。仮に、e0もΔ1も逆方向にズレるとしたら、e0を別の手段で特定する必要が出て来ますが、位相差AFを発明なさった方は、ラインセンサー(ひろ君ひろ君さんによると発明当時は多角形回転ミラーだそうですが)を2本を用いれば、e0が消去出来ると分かっていたからこそ、2本のラインセンサーを使用しようと思い付いた訳ですよね?
以下も差分の応用と言えそうです。
・ダーク補正
https://ja.wikipedia.org/wiki/%E3%83%80%E3%83%BC%E3%82%AF%E8%A3%9C%E6%AD%A3
(余談ですが、最近はコンポジットを活用する場合が多いと思います。ただ、合わせてダーク補正を行う場合もあるようです)
・コンポジット撮影編
http://www.el-wind.info/lecture/compos02/
> エアコンの例えは何を仰りたいのか全くわかりませんし
> 何を以って「結論ありき」なのか?なぜそのような方向に話がずれるのか
> サッパリ理解できません
譬えに何を使おうか少々悩んだのですが、今回はエアコンを使いました。以下なら、分かって頂けるでしょうか?
> 2つの位相の差し分を利用するから「位相差」ですよ
> 一つだけでは位相「差」は発生しません
は、「固着性動物は動物だから動く」「燃料電池は電池だから充電出来る」「薬の有害事象は有害だから副作用の事」。今はこれ以上、思い浮かびませんが、天下り式にお話になっても説得力はないと思います。
1日が24時間なのは、「地球の自転が約23時間56分(平均恒星日)+(公転により、太陽に対し360度回転するには、360度以上自転しないといけない為)約4分」によります。「1日だから24時間なのは当たり前」と思い込む前に、原理的に?お考えになられては如何でしょうか?
・恒星日
https://ja.wikipedia.org/wiki/%E6%81%92%E6%98%9F%E6%97%A5
書込番号:20081847
![]() 1点
1点
なぜここまで絡まれるのか理解できませんが
ようするに「アハト・アハトはわかってない」と
いいたいのでしょうかね?
そう思いたいのであればそれで結構ですよ。
ただスポックさんがどう考えようと
位相差検出には「原理的に」対になる2つのセンサが必要ですし
一つだけのセンサでは「原理的に」位相差検出はできません
「原理」の説明が必要でしたら
このスレッド中で貴方自身も、言い方は違いますが私も、
またじよんすみす氏はじめ諸兄も説明していますし
ご紹介されたブログで、これ以上ないくらい詳細に説明そして
図示されています。
それらを読んでなお「ひとつのセンサでも位相差検出ができる」と
いうのが私には理解できません。
それが私の理解不足である、というのであれば
もう降参、お手上げ、私の頭が悪いということで
これ以上のコメントは不要です。
書込番号:20081995
![]() 1点
1点
アハト・アハトさん
不愉快な思いをさせてしまい、誠に申し訳ありません。深くお詫び致します。
【蛇足】
以下は、無視して下さい。
> それらを読んでなお「ひとつのセンサでも位相差検出ができる」と
> いうのが私には理解できません。
どうして話が通じないのか、漸く分かりました。私は「(被写体が点の場合)1本のラインセンサーだけで測距可能」と繰り返し述べて来ましたが、「1本のラインセンサーだけで位相差検出が可能」とは一度も言っていません。原理云々がどこから出て来たのかも、合点が行きます。
アナスチグマートさん、ひろ君ひろ君さん、じよんすみすさんのコメントから、被写体が点であっても、光軸(測距点が複数あれば測距点上?)になければ、2つのラインセンサーが必要であると改めて分かりました。私も[20062099]で、
「問題は、点光源が図2〜4の上下にズレた時です。この時は、合焦の場合、点光源による輝点は図5の黄緑に相当するはずなので、合焦の位置は、a0からe0だけズレます。しかし、図6の下にある式1と式2のように扱えば、e0を消去出来ます。つまり、e0を消去する為、2つのラインセンサーが必要となります。」
とは申し上げたものの、結局、測距点が複数あればOKかも?と考えてしまい、ラインセンサーが2本必要なのは、被写体が面(実際には線)の時だけと言う考えに至っていました。3人の方からご見解を伺えたお蔭で、1本のラインセンサーだけで測距可能なのは上記の特殊条件の時だけだと、考えを改める事が出来ました。どうもありがとうございます。
書込番号:20082134
![]() 0点
0点
ミスター・スコップさん
>私は「(被写体が点の場合)1本のラインセンサーだけで測距可能」と繰り返し述べて来ましたが、
>「1本のラインセンサーだけで位相差検出が可能」とは一度も言っていません。
私とてこのスレでは一貫して位相差の話をしていたつもりですが・・・
記憶に間違いがなければ、はじめに私のコメントを引用されたのはスポックさんです。
書込番号[20076271]ですが、
タイトルが
>(2) 位相差AFの原理
として
以下の私のコメント
> ラインセンサは二つないと原理的に検出は無理だと思いますよ
に対し、スポックさんは「可能である」とおっしゃったのが端緒です。
これが位相差のことを言っているのでなければ
私の読解力不足、思い込みですね。申し訳ございませんでした。
閑話休題
以下は蛇足の「個人的理解」ですので読み飛ばしていただいても結構ですが
「像は白地の中央に黒い線があるカンタンなパターン」また例えば「白地の中央に点」
これらは「点・線が描画された平面」であって、「点」ではありません
理論上の「点」ならば、光軸上のどの位置でも点を保ちますので
もし本来あるべき位置がーーー○ーーーとわかっているのならば
たしかにセンサ一つの場合でもーーーーー○ーとズレ量と方向を検出できます
ですが実際の物体はレーザーのように直進的な光を放つ点光源ではありません
なのでピントが合っていなければセンサ上ではボケます
この状態では上記のように正確なズレ量は検出できません
ボケてエッジが曖昧になりますし、その量は距離によって変化します
黒丸ー滲んだ黒丸ー薄いグレーの染み、というように。
このエッジの拡大量・濃淡と距離の相関テーブルでもあれば、一つのセンサ(結果)でも
比較参照でズレ量を割り出すことは不可能ではないでしょうが、特定条件下でしか成立せず
まして位相差方式のようにズレ量や方向を実用的に検出するのは困難ではないかと思います
もしセンサ一つでやろうとするなら
コントラスト方式の方が手っ取り早いし実用的じゃないでしょうか
もっとも、それならセンサは撮像センサで肩代わりできますから
別にラインセンサ設ける意味もないのですけど。
書込番号:20082406
![]() 2点
2点
ふと疑問なのですが、ピントが合っていない場合、ラインセンサー上でも像はボケているのでしょうか。
キヤノンのHPを見ると、ピントがずれている場合、光路長も変化していて、ピントがずれていてもラインセンサー上ではピントがきているように見えるのですが、どうなのでしょうか。
http://web.canon.jp/Camera-muse/tech/report/2011/09/
書込番号:20082457
![]() 0点
0点
アナスチグマートさん
私は理系科学星人ではないので
ソコは確信もって説明できませんが(なので「個人的理解」と但し書きしています)
スコップさん(すみません、スポックさんじゃなかったんですね・・・申し訳ないです)が
紹介されているブログ中の”図3”の説明の中でもそう触れられていますし
(以下引用)-------------------------------------------------------
なお、正確には、AFセンサー上の像は、図2と違ってピントが合わず、ボケています。
ボケた像の中心点が、像の位置です。
----------------------------------------------------------------
そのように理解していました
キヤノンの説明であれば・・・
フォーカスレンズがうごくと焦点面が移動していますよね
それで焦点面が動けば、当然AFセンサの二次レンズとの位置関係は変わりますから
二次レンズからの結像面もラインセンサ面とずれると思いますが
あの模式図では結像面はラインセンサ上のままです
レンズの屈折率が変わりでもしない限り、あのようになる事はないと思いますが・・・
あれはあくまで作動原理を説明するための模式図なのではないでしょうか?
書込番号:20082693
![]() 2点
2点
私も像はぼけるんじゃないかと思ったのですが、以下の図を見ると、やはりピントが合っているような図になっています。
http://image.itmedia.co.jp/l/im/dc/articles/1009/14/l_hi_af01.jpg
ピントがずれた分だけラインセンサー上での結像位置が変化しています。(光路長が変化している)
つまり、縦位置にずれたフォーカスが横位置に置き換えられている、ととらえることもできるのかなと思いました。
図に問題があるのか、実際そうなのか、この点が判断できずにいます。
書込番号:20082739
![]() 0点
0点
ラインCCD上は値か大きく64とか128くらいあるので
比較的像になっていると思います
まあ、ボケていてもパターンマッチングはできると_思います。
書込番号:20083529
![]() 1点
1点
k型スクリーンでマット面はボケていても
スブリットないははっきり見えますから。
書込番号:20083555
![]() 1点
1点
アハト・アハトさん
こちらこそ、誤解を招く表現だった事をお詫び致します。
物事を客観的に考えるよう努めているつもりでも、やはり認識を自分の枠外まで拡げ俯瞰的に捉えるのは、少なくとも私には困難なようです。
改めて、お詫び申し上げます。
アナスチグマートさん、アハト・アハトさん、その他の皆さん
とても参考になる資料を見付けました。1989年にキヤノンの方がお書きになられた解説です。日本光学会機関誌への寄稿なので、素人相手のような分かり易く簡略化された内容ではなく、実際に使用されている技術内容が記載されています。是非、お読みになって下さい。
・一眼レフカメラのオートフォーカス技術/ 鈴木謙二氏
https://annex.jsap.or.jp/photonics/kogaku/public/18-11-kaisetsu2.pdf
以下に私が気付いた点を列挙します。理解不足等による間違い/誤解等が多々あると思いますが、ご容赦頂ければ、幸いです。
図1は、「撮影レンズの光軸上に物体として点光源がある場合」なので、(本文中に記載はありませんが)1本のラインセンサーのみで測距可能な場合に相当します。
続いてすぐに、「光軸上の点物体で説明した議論は軸外物点でも変わるところはない. 2光束A, Bから形成される2像の絶対的位置が全体としてずれること以外, 2像の相対的位置関係は軸上の場合と同様である. 注目しているのは2像の相対的位置であり, 像の形成される絶対的な位置は問題にしていない.」とあります。「2像の絶対的位置が全体としてずれること」がブログ記事のe0に相当しますが、「注目しているのは2像の相対的位置」と明記されています。要するに、2本のラインセンサーが必要と言う事です。
アナスチグマートさんが気になさってるボケ等に関しては、以下の記載が参考になると思います。「AF光学系の収差補正の考え方は撮影系とは異なり, 結像スポットを小さくすることよりも,ディストーションをなくすことに重点が置かれている.」「ただし計測される量は相対的位置変化量なのでセパレータレンズ系のディストーションの差異が問題である.」「一方,AF光学系の解像性能はあまり高い必要はない. むしろ適度に光学像が拡がっていると, 光学的ローパスフイルターとして機能し, イメージセンサーのサンプリング系で高周波折返し歪を拾わないようになるので望ましい. 」
私が唸った記述の一つが以下です。これほど明確かつ簡明な、位相差AFとコントラストAFの概念説明を今まで読んだ事が、私はありませんでした。「位相差方式とはまさに光学像の空間周波数成分の位相情報(シフト情報)を本質的には検知しており,比較的低い空間周波数に着目している. この点は高周波成分の増減を見るコントラスト検知方式とは基本的に異なるところである.」
次で引用されているのはニコンの特許ですが、フーリエ変換がなされているので、まさに周波数(位相)ですね。「実際図3の系において, イメージセンサーの出力を特定の空間周波数成分でフーリエ変換し,その位相差を用いて合焦制御するカメラも商品化されている.」
「イメージセンサーによりサンプリングされた像強度分布情報を演算処理する方法は, 何通りか知られている.」とある事に注意が必要です。以降で述べられている演算処理は一例で、正確かつ実用的な測距さえ可能なら、(製品化されているのかは不明ですが)ブログ記事のように(微分による)エッジ検出でもOKのはずです。
私が唸った別の記述が「デフォーカスの決定は次のように考える.像Bに対し, Aの像のサンプリングデータを相対的にP画素ずらして‥」です。まさか、演算にて、画素ずらし処理を行っているとは思いも寄りませんでした。このスレで過去3回引用されている以下のキヤノンの説明図だけ見ているとすっかり騙されますね!
・オートフォーカスの仕組み(キヤノン)
http://web.canon.jp/Camera-muse/tech/report/2011/09/
以降で説明されている演算処理は、ザックリ、以下のような感じかな?と思います。
・(本文では最後の方で述べられていますが)ゴースト光等による影響を取り除く為、「差分≒離散的微分処理≒ハイパスフィルター」により低周波数成分を取り除く。
・pを所定の範囲で1画素ずつずらし、積分値(実際には級数)Upを求める。図8に、(p,Up)をプロットすると、○に相当する。
・補間は「図8の演算は, 基本的に2重積分である」とある事から、(上と合わせれば2回目の)級数を用いる最小二乗法を用いているのでは?と想像される。図8の曲線には折り返しがあるが、2つの曲線としてそれぞれに最小二乗法を用いているのか、折り返しの箇所で上下反転させ1つの曲線として最小二乗法を用いているのかは不明。前者だと最小二乗法の精度が落ち、さらに2つの曲線の交点を求める必要がある。後者だと図8のUpの最小値がp軸との交点となっていない(が、2個の AF光学像にレベル差を吸収するため、オフセット値がカメラ1台毎に設定されているのかも???)。
結局、「2個の像強度分布」のそれぞれをハイパスフィルターに通し、低周波数成分を除去した「2個の像強度分布」の差分を積分、補間の為さらに積分、と言うイメージかな?と思います。
> すみません、スポックさんじゃなかったんですね・・・申し訳ないです
全然OKです。オリジナルへの敬意を込めてのHNですので。
因みに、HNの由来に関して、6084さんが見事大当たりのコメントを下さり、凄く嬉しく思いました。
http://bbs.kakaku.com/bbs/-/SortID=20013676/#20017547
書込番号:20083619
![]() 1点
1点
この書き込みはちょっと別の話題です。申し訳ありません。
もし以下に関して、分かる方がおられたら、教えて頂けないでしょうか?元々、過去のスレにて質問させて頂き、霧G☆彡。さんにご出題頂いた演習問題を(力ずくで)解きました。しかし、何となく分かったような分からないような感じで、未だにモヤモヤしたままです。
「一眼レフカメラのオートフォーカス技術/ 鈴木謙二氏」の図3には、光束が図示されています。仮にF5.6に対応した光束とします。厳密にF5.6のみなら光束はもっと薄いでしょうから、F5.6付近の幅を持った光束だと思います。F5.6対応ラインセンサーでF8光束を取り扱う事は(光強度不足等を別とすれば)可能と思います。ただ、もしF8(専用の)対応ラインセンサーを配置したとしたら、F8対応ラインセンサーは、F5.6対応ラインセンサーの配置を中心を維持したまま、相似縮小した配置になるのでは?と想像しています。図3に当て嵌めると、A、Bの光束は対称性を維持したまま、レンズの光軸に近付くからです。この場合、中心を通る十字方向のF5.6対応ラインセンサーは、以下のようにすれば、F8対応ラインセンサーとして使用可能と思います。
[F5.6対応時] 仮に5つの測距点用ラインセンサーが1本に繋がっているとし、以下のように分割されているとします。A+2とB-2のちょうど中間に中心があるとします。サフィックスの数字が同じ分割ラインセンサーが位相差AFでの対となります。
・A用ラインセンサー:A-2、A-1、A0、A+1、A+2
・B用ラインセンサー:B-2、B-1、B0、B+1、B+2
[F8対応時] 本来ならもっと細かい単位でズレるでしょうし、ラインセンサーとして必要な長さが異なると思いますが、ここでは1つの測距点相当分、相似縮小されるとします。(図に書くと分かり易いのですが、省かさせて頂きます。申し訳ありません)
・対となる分割ラインセンサーは、「A0とB-2」、「A+1とB-1」、「A+2とB0」
・測距点を5つにする為には、ここまで想定していなかったA+3とB-3が必要で、上の3つの両側に「A-1とB-3」、「A+3とB+1」が加わります。
中心を通る十字方向のF5.6対応ラインセンサーなら、上記の考え方で多分OKと思いますが、問題は中心を通る十字方向にないF5.6対応ラインセンサーを、F8対応ラインセンサーとして使用する場合です。「F8(専用の)対応ラインセンサーの配置は、F5.6対応ラインセンサーの配置を中心を維持したまま、相似縮小した配置になる」としたら、ファインダーで示される測距点の位置がズレると想像します。このズレが問題となるレベルなのかどうかは分かりませんが、ズレが必ず発生するのではないでしょうか?
実はこのズレは、中心を通る十字方向のF5.6対応ラインセンサーでも中心の1点を除き、生じていると想像します。ただ、まだズレてもファインダーで表示される格子上にはあります。中心を通る十字方向にないF5.6対応ラインセンサーだと、ファインダーで表示される格子上にすらありません。
[1DX2の場合]
・ラインセンサーの配置
http://dc.watch.impress.co.jp/img/dcw/docs/741/041/18.jpg
・測距点
http://cweb.canon.jp/eos/lineup/1dxmk2/img/feature-aeaf/ranging-concept.gif
[過去に立てた質問スレ]
・中央測距点のみ開放F8対応の仕組みを教えて下さい
http://bbs.kakaku.com/bbs/K0000347675/SortID=17229252/
書込番号:20083633
![]() 1点
1点
>ミスター・スコップさん
いつも丁寧なコメントありがとうございます。
デフォーカス時、AFセンサー上の像はボケているのが正しいのですね。そのほうがピント合わせにも好都合であると。
F8センサーですが、F5.6センサーと兼用しているなら、F8センサーの中心はセンサーラインの中心には来ない、でいいのではないでしょうか。
それで特に問題はないように感じたのですが、どうでしょうか?
前スレの内容が消化不良なのもので、勘違いがあればすみません。
書込番号:20083806
![]() 1点
1点
アナスチグマートさん
レス、ありがとうございます。少しでもアナスチグマートさんのお役に立てれば幸いです。
> F8センサーですが、F5.6センサーと兼用しているなら、F8センサーの中心はセンサーラインの中心には来ない、でいいのではないでしょうか。
> それで特に問題はないように感じたのですが、どうでしょうか?
アナスチグマートさんもやはり、F5.6対応ラインセンサーを、F8対応ラインセンサーに流用した場合、(中心の1点以外)測距点がズレるとお考えなのですね?
開放F8レンズを使用するのは、(超)望遠レンズにリアコンバージョンレンズ(エクステンダー/テレコンバーター)を使用した時が殆どだと思います。なので、いい譬えではありませんが、開放F8レンズを用いたポートレート撮影で、斜め横顔の手前側の瞳に合わせた測距点でAFを行ったとします。しかし、ファインダーに表示される測距点の位置が実際の画像の位置とは一致していないので、狙った瞳でなく、ピントが例えば瞼に合ってしまったと言ったケースがあり得ると思うのですが、あまり問題にはならないのでしょうか?(超)望遠レンズにリアコンバージョンレンズを使用するのは、スポーツ撮影等が多いと思われ、選手等の被写体の動きにさえ追従してくれれば(しかも複数の測距点で捉えているでしょうから)、現実には問題視されないのかもしれませんね。
書込番号:20084217
![]() 1点
1点
 |
 |
 |
|---|---|---|
1DXmk2のAFセンサー |
1DXmk2の測距パターン図 |
1DXmk2の測距点 |
>ミスター・スコップさん
あ、考えを改めます。F5.6とF8の測距点は合わせていると思います。
1DXmk2のラインセンサーの配置をみていたら、中央3列は縦横F8クロス測距なのに、左右4列のF8測距点は縦のみとなっています。
縦方向のラインはどの列もつながっているので、ジャスピン位置は各光束ごとに理想的な配置におけるはずです。
F5.6とF8の光束の位置は異なりますが、ラインを幅広くとることでF8のオフセット分をカバーしているのでは、と思います。
つまり、F5.6とF8の測距位置も計算して合わせられると。
中央横方向もF8測距出来るよう余裕のある設計なのだと思います。
左右の横ラインは幅に余裕がなく、横方向のF8測距は諦めたのかなと推測します。
思ったことをつらつらと書いたので読みにくいと思いますが、伝わるでしょうか?
おかしな点があればぜひご指摘お願いします。
書込番号:20084257
![]() 1点
1点
 |
 |
|---|---|
下の赤い箇所(元F5.6以外は除外)が仮想「F8専用ラインセンサー配置」 |
1DXと1DX2のAFセンサー比較 |
アナスチグマートさん
私の素朴な疑問に対し、色々とお考え頂き、どうもありがとうございます。
アナスチグマートさんの仰りたい事は何となく分かります。ただ、ラインセンサーの長さ方向なら、F5.6対応をF8対応に置き直す(分割し直す)事は(測距点の位置がズレるとしても)可能かもしれませんが、幅方向は厳しいように、直感的には感じました。
次に進む前に、1DX(同じAFセンサー搭載の5D3も同様です)、1DX2の位相差AFに関して、おさらいしておきます。
・1DX/5D3は発売当初は、F5.6対応まででした。
・1DX/5D3はファームウエアのアップデートにより「エクステンダー装着時、開放F8になるレンズで中央1点のクロス測距が可能。また、中央測距点とその上下左右4点で、領域拡大AFも活用可能」となりました。
・1DX2は発売当初から「最大61点(=全測距点、うちクロス21点)でF8対応測距可能」です。1DXとは、「全測距点=61点」は同じで、測距エリアが拡大しています。
以降は、アナスチグマートさんのお考えにストレートに対応しません。お許し下さい。
まず、「もしF8専用ラインセンサーを配置したとしたら、F8専用ラインセンサーは、F5.6対応/専用ラインセンサーの配置を、中心を維持したまま相似縮小した配置になる」との想像を、AFセンサー実物写真にて「見える化」してみました。
F8とF5.6はF値として1段異なります。n=0、1、2、‥、nに対応したF値をF(n)、有効口径をD(n)、焦点距離をfとすると、
F(n)=f/D(n)、F(n)=2^(n/2) → D(n+1)/D(n)=F(n)/F(n+1)=2^(-1/2)=1/√2
となるので、F5.6専用ラインセンサーの配置を(1/√2)倍すれば、F8専用ラインセンサーの配置となると考えられます。
AFセンサー実物写真は、(アップした2枚目で示しますが)1DXと1DX2とは殆ど変わりません。たまたま1DXの方がラインセンサーがクッキリと写っていたので、1DXのAFセンサー実物写真を使用しました。中央部、左右部の合計3ヶ所のラインセンサー配置を、中心を維持したまま、(1/√2)倍したのが、アップした1枚目の下の赤くなった箇所です。F5.6ラインセンサーの配置からかなりズレている事が分かります。この赤い箇所にラインセンサーがあれば、測距点の位置は、ファインダーで表示される位置と一致します。しかし実際には、F5.6対応ラインセンサーを用いる訳ですから、仮に測距出来たとしても、測距点の位置は、ファインダーで表示される位置と一致しません。ピントを瞳に合わせた積りが瞼に合ってしまったみたいな事態が発生し得ると思います。
アップした2枚目は、1DXのAFセンサーと1DX2のAFセンサーを比較し易いよう、大きさをほぼ揃えたモノです。1DX2のAFセンサーの配置は1DXと似ているので、1枚目の赤いラインセンサーとの位置ズレを吸収出来るようには見えないと思います。
> 左右の横ラインは幅に余裕がなく、横方向のF8測距は諦めたのかなと推測します。
左右では、F4対応縦線検出(ラインセンサーの向きは横向きなので、1DX2では横測距とも表現しています)が配置されているので、F5.6対応縦線検出(1DX2では横測距)を配置するスペースがありません。従って、「横方向のF8測距は諦めた」のではなく、そもそも(F8対応を兼ねる)F5.6対応縦線検出(1DX2では横測距)が存在しないのです。無理やり(F8対応を兼ねる)F5.6対応縦線検出(1DX2では横測距)を配置するには、F4対応縦線検出(1DX2では横測距)と置換するか、F4対応縦線検出(1DX2では横測距)を中央部のF2.8対応のように、斜め線検出にする等しかないと思われます。
【キヤノン商品説明のAF関連ページ】
・1DX
http://cweb.canon.jp/eos/lineup/1dx/feature-afae.html
・1DX2
http://cweb.canon.jp/eos/lineup/1dxmk2/feature-aeaf.html
【AFセンサーと測距パターン概念図】
1DX2の「測距パターン概念図」のみ、縦線検出→横測距、横線検出→縦測距となっています。1DX2の商品ページでも他の箇所では、縦線検出/横線検出と言う表現が使用されています。
・1DX
[AFセンサー]
http://dc.watch.impress.co.jp/img/dcw/docs/516/132/013.jpg
[測距パターン概念図]
http://dc.watch.impress.co.jp/img/dcw/docs/516/132/015.jpg
・1DX2
[AFセンサー]
http://dc.watch.impress.co.jp/img/dcw/docs/741/041/18.jpg
[測距パターン概念図]
http://cweb.canon.jp/eos/lineup/1dxmk2/img/feature-aeaf/ranging-concept.gif
書込番号:20084410
![]() 1点
1点
 |
|---|
以前のスレでは「オミナリオ」として参加していました
最後の方はちょっと疑問を感じてROMってました
結局
霧さんから煙にまかれた感じで終わった印象です
今回の疑問
>問題は中心を通る十字方向にないF5.6対応ラインセンサーを、F8対応ラインセンサーとして使用する場合です。
>「F8(専用の)対応ラインセンサーの配置は、F5.6対応ラインセンサーの配置を中心を維持したまま、
>相似縮小した配置になる」としたら、ファインダーで示される測距点の位置がズレる
感覚的に「こういう事を言っているのかな?」と想像して答えるなら
測距枠と実際の測距点がズレる範囲は「F8非対応」になっている
という事ではないかと思いますが・・・
読解力があまりないので、意図がうまく読み取れないでいます
以前に貼った画像を再掲しますので、それで説明していただけると
他の方も含め齟齬が少なくなるのではないかと思います
できれば文章の方も適宜改行と要約を入れていただいて
要点を整理された方がなおベターかと思います
書込番号:20084535
![]() 2点
2点
アハト・アハトさん
あの時の質問スレでは、オミナリオさんに大変お世話になりました。別スレでもわざわざ作図してご説明頂いた記憶があります。
散々お世話になっていながら、このスレでは大変失礼な事を申し上げ、誠に申し訳ありませんでした。人間としての器の小ささを痛感しているところです。
既にご覧になられているかもしれませんが、私の現在の考え方は、[20084410]で説明した通りです。「もしF8専用ラインセンサーを配置したとしたら、F8専用ラインセンサーは、F5.6対応/専用ラインセンサーの配置を、中心を維持したまま相似縮小した配置になる」との想像は、あの質問スレにて、オミナリオさんが示して頂いた図(今回、改めてアップして頂いた図)が、発想の原点です。私の想像を「見える化」したのが、[20084410]にアップした1枚目の下の画像です。
> 測距枠と実際の測距点がズレる範囲は「F8非対応」になっている
1DX/5D3では、十字方向以外はF8対応としなかったので、仰る通りなのですが、1DX2では前述の通り、発売当初から「最大61点(=全測距点、うちクロス21点)でF8対応測距可能」です。
もし[20084410]にアップした1枚目の下の画像が概ね正しいとしたら、1DX2で開放F8レンズを使用すると、実際の測距点の位置は、ファインダーで表示される位置(AFフレーム)と、中心を除き、一致しません。この場合は本来なら、アハト・アハトさんが仰るように「F8非対応」とすべきように思いますが、1DX2ではそうなっていません。ニコン機でも(詳細まで見ていませんが)F8対応に関しては同様の問題を孕んでいます。
> 以前に貼った画像を再掲しますので、それで説明していただけると
> 他の方も含め齟齬が少なくなるのではないかと思います
この点に関しては、前述の繰り返しになりますが、私の想像を「見える化」したのが、[20084410]にアップした1枚目の下の画像です。
> できれば文章の方も適宜改行と要約を入れていただいて
> 要点を整理された方がなおベターかと思います
出来るだけ論理立てて説明して来た積りだったのですが、分かり難い記載になっていたようで、申し訳ありません。以後、気を付けます。
書込番号:20084640
![]() 1点
1点
ちょっとシンプルに考えてみました。
F5.6測距点がF8にも対応しているなら、この2つの光束は同じセパレータレンズを通ってきていると推測します。
仮にF5.6の光束がF4〜F8の幅をもって結像しているなら、同じセンサーでF8を検出できてもいいはずです。
これなら測距点のセンターがF5.6とF8で一致します。
もうすでに議論された内容であればすみません。
書込番号:20084710
![]() 1点
1点
 |
|---|
イマイチ飲み込めていませんが
「こうなると測距点と対になるラインセンサの交点がズレるのでは?」
ということですか?
右図は仮想?F8測距点として。
書込番号:20085022
![]() 2点
2点


 |
 |
|---|---|
中央部の一番上のF5.6対応・横方向(縦線検出)ラインセンサー |
F8専用ラインセンサーとF5.6対応ラインセンサーとの関係 |
アナスチグマートさん、アハト・アハトさん
私の素朴な疑問の為に、色々考えて下さり、さらには作図までして頂き、本当にありがとうございます。
また、レスが遅れてしまった事、及び、以降ではアナスチグマートさんやアハト・アハトさんのコメントへの直接的な回答になっていない点を、お詫び致します。
アップした1枚目をご覧下さい。今回は、1DXの測距点のうち、中央部の一番上のF5.6対応・横方向(縦線検出)ラインセンサーに注目します。この図から分かるように、注目している横方向(縦線検出)ラインセンサーは、3つの測距点に対応しています。そこでそれぞれの測距点を、左から、-1、0、+1と表す事にします。
アップした2枚目をご覧下さい。前述の通り、元F5.6対応ラインセンサーに対応する赤いラインセンサーが、F8専用ラインセンサーとなります。F5.6対応と同様に、3つの測距点に対応すると考えると、F8専用では、「a-1とb-1」、「a0とb0」、「a+1とb+1」が対となり、3つの測距点を構成します。
しかし赤いラインセンサーの箇所には、実際のラインセンサーは存在しないので、F5.6対応ラインセンサーを利用する事になります。F5.6対応の測距点(横方向(縦線検出)、縦方向(横線検出)は、それぞれ別として扱われます)は全てF8対応と考えると、中央部のF5.6対応・横方向(縦線検出)ラインセンサー:合計7本を、全て利用する事になります。従って、「a-1とb-1」、「a0とb0」、「a+1とb+1」に疑似的に対応させるF5.6対応ラインセンサーは、「A-1とB-1」、「A0とB0」、「A+1とB+1」の3つの対から構成されるはずです。ところが、A+1とB-1にはラインセンサーがありませんので、対を構成出来るのは「A0とB0」のみです。
先にアップした、1DXと1DX2のAFセンサー比較を改めてご覧になっても、今注目している横方向ラインセンサーは、1DXと1DX2とで大きな差異は認められません。しかし、1DX2の測距パターン概念図で、今注目している横方向(縦検出)のF8対応測距点は、横方向(縦検出)のF5.6対応測距点と同じく3つあります。ここが大きな問題点の一つです。
・先にアップした、1DXと1DX2のAFセンサー比較
http://bbs.kakaku.com/bbs/-/SortID=20056837/ImageID=2556327/
・1DX2・測距パターン概念図
http://cweb.canon.jp/eos/lineup/1dxmk2/img/feature-aeaf/ranging-concept.gif
次にファインダーに表示されるAFフレームと、実際の測距点との位置関係に付いて考えます。
まず、ラインセンサーの長さ方向に関しては、F8対応の箇所を利用しているので、取り敢えず、問題なしと考えます。
問題なのは、ラインセンサーの幅方向のズレです。F8対応であれば、(中心の横方向ラインセンサーから数えて3本目のラインセンサー上にある)「a0とb0」に位置するはずなのに、「A0とB0」はより外側に位置しています。この位置と一致するF8対応は、中心の横方向ラインセンサーから数えて(実在しない)約4本目のラインセンサー上にあると捉えるのが、妥当と思われます。つまり、ファインダーに表示されるAFフレームより、約1つの測距点分、上側で測距している事になります。
このファインダーに表示されるAFフレームとのズレに関しては、後で若干触れたいと思います。
(続きます)
書込番号:20085587
![]() 1点
1点
(続きです)
またまた、とても参考になる資料を見付けたので、ご紹介します。探した切っ掛けは、アナスチグマートさんがセパレータレンズに着目なさった事です。さらに幸運な事に、たまたま1DXの例に取り上げ、考察して来ました。この2つの検索ワードが幸運をもたらしました。
・EOS-1Dx AF Sensor and Optics / Marianne Oelund氏
https://www.dpreview.com/forums/post/54287749
資料全体が非常に面白く、ワクワクしながら読めると思うので、是非ご一読下さい。
ここでは、まず、F値とラインセンサーとの位置関係に関して記述されている箇所を抜き出したいと思います。ただ、該当箇所をお読みになる前に、前述の以下を思い出して下さい。
> F8とF5.6はF値として1段異なります。n=0、1、2、‥、nに対応したF値をF(n)、有効口径をD(n)、焦点距離をfとすると、
>
> F(n)=f/D(n)、F(n)=2^(n/2) → D(n+1)/D(n)=F(n)/F(n+1)=2^(-1/2)=1/√2
>
> となるので、F5.6専用ラインセンサーの配置を(1/√2)倍すれば、F8専用ラインセンサーの配置となると考えられます。
F(n)とF(m)との関係であれば、F(m)対応ラインセンサーの配置は、F(n)対応ラインセンサーの配置を、2^((n-m)/2)倍すれば、得られます。‥‥(あ)
この事に留意しながら、資料から抜き出した、以下をお読み下さい。
「The detection lines for f/2.8 sensitivity need to be set about twice as far from center, as the f/5.6-sensitivity detection lines are.」
「If you check dimensions carefully in this photo, you can see that the center-to-center spacing of the horizontal-line sets for the outer groups, is about 1.4x the center-to-center spacing of their vertical-line sets.」
私より、遥かに遥かに超優秀な方も、(あ)と同様に考えておられます。ただ、ここで注意したいのは、この方が言及されているのが、ラインセンサーの長さ方向に関してである点です。先程、ファインダーに表示されるAFフレームと、実際の測距点との位置関係で、保留になっていたのは、ラインセンサーの幅方向に関してです。F5.6対応とF8対応とでは、ラインセンサーの幅方向に関しても、ズレが生じるとは思いますが、ラインセンサーとランセンサーとの間隔は、カメラメーカーの設計によって決められています(当然、制約条件はあるはずですが‥)。従ってラインセンサーの長さ方向のように、一律に決まる訳ではないのは確かだと思います。繰り返しになりますが、F5.6対応とF8対応とでは、ラインセンサーの幅方向に関しても、ズレが生じる事はほぼ確かだと考えています。
次に、アナスチグマートさんが着目なさったセパレータレンズに関してです。この方は、1DXのセパレータレンズの写真を見付けられなかったそうです。そこで浮上するのが、既に見付けていたD300のセパレータレンズ・マスクです。
D300の測距パターン概念図を、私は見付けられなったのですが、D300のAFモジュレーションは、D3と同一。さらにはD3SはD3のマイナーチェンジだろうと言う事で、D3Sの資料にて、お茶を濁します。
・Nikon D3S Optics
http://www.imaging-resource.com/PRODS/D3S/D3SA4.HTM
この資料によると、全測距点=51点、クロス測距点=15点です。全51点が表示された図の中央部分、5×3の箇所がクロス測距点です。
改めて、D300のセパレータレンズ・マスクの図を見ると、確かに中央部分はクロス測距に対応しており、左右部分は横測距(縦線検出)に対応しています。
このD300のセパレータレンズ・マスクをお手本に、この方が1DXのセパレータレンズ・マスクを設計なさったのが、ご自身のお名前を冠した「Marianne's separator mask design for the EOS-1Dx (not patented).」です。実は、ここで、過去の質問スレのそもそもの疑問(出発点)に対する回答を見付けてしまった!!!かも???
その記述とは、以下です。
「On the separator mask, the spacings between pairs of mask openings must all be exactly scaled to the size of the aperture circle on the main lens which they correspond to. Thus the openings for f/4-sensitivity are Sqrt(2) times further apart than the f/5.6-sensitivity openings, etc.」
やはり、セパレータレンズ・マスクで、F値に対応した光束を取り出しているではないですか?
その下の射出瞳の図を見ると、F5.6に相当する射出瞳は、F8にも掛かっているので、何とかなるでしょうか?それとも、1DX2のセパレータレンズ・マスクは、1DXのセパレータレンズ・マスクと較べ、F5.6光束相当が、F8光束を含んだ形状になっているのでしょうか?でもそうすると、光束の幅が広くなり過ぎて、F5.6もF8も測距精度が悪くなるように思いますが、どうなのでしょう?
書込番号:20085591
![]() 1点
1点
 |
|---|
スコップさんの返事を待たずに申し訳ないです
個人的理解としてはこんな感じですが・・・
アナスチグマートさんとたぶん、同じ事だと思います
V、V'が縦ラインセンサ(横線検出)・・・以下V軸
H、H'が横ラインセンサ(縦線検出)・・・以下H軸
黒枠が測距枠に対して使用されるラインセンサの範囲で
測距枠を中心に対極に位置し、対称となる範囲しか使えない(他方は長く、他方は短くは使えない)
グラデーション枠が、それぞれの光束が利用できるセンサ範囲
青〜緑〜黄緑がF8〜F6.3〜F5.6
Case:赤い測距枠「a」
V軸で対として利用できる黒枠のセンサ範囲aV&aV’はF8までカバーできる
対してH軸で利用できる範囲aH&aH’はF5.6の範囲しかカバーできない
つまりF8光束対応で使えるのはV軸で横線検出のみ
Case:青い測距枠「b」
V軸で対として利用できる黒枠のセンサ範囲bV&bV’はF8までカバーできる
H軸で利用できる範囲bH&bH’は、測距枠「a」の場合に比べオフセットした分だけ
対で利用できる範囲がF8まで広がり、両軸の縦横クロスでF8光束対応できる
穿った見方や受け取り方によっては齟齬を招くかもしれませんが
ごくシンプルに説明向けにまとめれば、こういう事ではないかと思います
計算式に落とし込んで検証したりしないで、素直に見てもらえればいいのですが・・・
書込番号:20085603
![]() 2点
2点
アハト・アハトさん
こんな綺麗な図を、わざわざ、作って頂き、どうもありがとうございます。アハト・アハトさんは、美的センスに優れていらしゃるのですね。
私のコメントが、遅くなって大変申し訳ありませんでした。アハト・アハトさんと入れ違いになってしまいましたが、コメントさせて頂いているので、ご覧になって下さい。
ラインセンサーの長さ方向に関しては、アハト・アハトさんと私は、定性的には、似たように捉えているように思います。定量的には、先程のコメントにある(あ)の関係になるはずです。
ラインセンサーの幅方向に関しては、先程もコメントしましたが、F5.6とF8ではズレが生じてると定性的には考えています。ただ定量的には、二次結像レンズ等、カメラメーカーの設計次第の所があるように思われるので、現在、保留状態です。
書込番号:20085697
![]() 1点
1点
 |
|---|
みなさんいろいろコメントありがとうございます。
私にとっても勉強になっています。
私の考えはアハト・アハトさんに近いですが、ちょっと違います。
まず、F8の光束はF5.6と同じセパレータレンズを通るという前提に立ちます。
その上で各光束をデフォーカスすると、各光束は添付の図のようにラインセンサー上を移動します。
アハト・アハトさんとちがうのは、ジャスピン時には両光束の中心はラインセンサーの中心にくるということです。
これなら端の測距点でもクロス測距ができます。
根拠は何もないのですが、キヤノンが中央3列でF8クロス測距できると言っている以上、こういう構成でないと無理と考えたからです。
もしキヤノンが何かごまかしているなら話は別なのですが。
私はこう考えた、というだけで、あくまで理論的根拠は何もありません。
おかしい点があればぜひご指摘願います。
書込番号:20086171
![]() 0点
0点
>ラインセンサーの幅方向に関しては、先程もコメントしましたが、F5.6とF8ではズレが生じてると
>定性的には考えています。
光束は円環状でバームクーヘンみたいなものでしょうかね
断面を長方形(ラインセンサ)で切り取った場合
外側が太い光束の一部、内側が細い光束の一部になりますね
切り取った幅は同じでも
バームクーヘンの年輪の円周の長さは、内側ほど短いですから
F5.6とF8では、切り取った周方向の長さは同じでも
円周に対する割合は変化しますね
仮に円周が像とすれば(かなり概念的ですが)
そういう意味ではまあ、ズレるというのもわかるような気もします
ただF8とF5.6の時で幅方向で値にずれがあったとしても
対になるラインセンサそれぞれで同様にズレるわけですし
差分は変化しないわけですから、検出そのものには障害はないように思いますよ
書込番号:20086213
![]() 1点
1点
アナスチグマートさん
>アハト・アハトさんとちがうのは、ジャスピン時には両光束の中心は
>ラインセンサーの中心にくるということです。
>これなら端の測距点でもクロス測距ができます。
非合焦時と合焦時のズレ量が、F5.6が大きくF8が小さいのはその通りです
ですから
F8対応測距点・・・◎大きいズレ ×微細なズレ・・・分解能の限界を下回る
F2.8対応測距点・・・◎微細なズレ ×大きいズレ・・・測定範囲を超過
F5.6はその中間でいずれも「○」
で多分解釈が違うのが「ラインセンサーの中心」がどこかという事かと思います
アナスチグマートさんがおっしゃるのは多分ラインセンサ「F5.6対応部分」の中心では
ないかと思います。私が先に図示した、黒枠の部分ですね。
開放F5.6のレンズを付けた場合は、確かにF5.6対応の黒枠部分の中心が
対となる各ラインセンサの結果の中心になります(合焦時)
ですが、実際開放F8のレンズを付けた場合はどうでしょうか?
F8の光束にはF5.6は含みませんから、当然黒枠内の黄緑〜緑色の部分はブラックアウトしてしまいます。
F8の光束の像が見えるのは、青色の部分からだけになります。
この場合はセンサが評価できるのは青い部分だけになってしまいますから
自ずと「ラインセンサの中心」は青い部分の中心・・・という事になります
つまり合焦時はF5.6もF8も「ラインセンサの中心」で結果が揃いますが
F5.6とF8では使えるラインセンサの範囲が変わりますので
ラインセンサ上における「中心」は変わるという風に私は理解しています
どうでしょうか?
書込番号:20087103
![]() 1点
1点
>アハト・アハトさん
コメントありがとうございます。
仮に開放F8のレンズをつけた場合(というよりF8のレンズをつけてAFすることが目的なのですが)、私の先ほどの光路図からF5.6の光束を取り除いた図になると考えています。
つまりF8の光束の位置はなんら変わらず、F8の光束が使えるラインセンサーの範囲も変わらないと。
(F値はセンサーに対する入射角にも相当するので、どんなレンズを持ってきてもF8の光束の位置は変わらない、と考えています)
私はこういう風に考えています。
どうですかね?
書込番号:20087193
![]() 0点
0点
>つまりF8の光束の位置はなんら変わらず、F8の光束が使えるラインセンサーの範囲も変わらないと。
それはそうですよ
F5.6とF8の光束で使う範囲が違うというだけで
F8の光束の通り道や使う範囲が変化するとは私も言ってませんよ
そんなんあり得ませんし。
どこが食い違っているんでしょうね?
書込番号:20087219
![]() 1点
1点
>アハト・アハトさん
アハト・アハトさんも同じ認識なんですね。
どこかに食い違いがあるみたいです。
それであれば私が図示した光路図がどこか間違っている、ということになると思うのですが、そのあたりはどうでしょうか。
書込番号:20087232
![]() 0点
0点
>私が図示した光路図がどこか間違っている
アナスチグマートさんが図示された光路図に則れば
F5.6対応センサならどこでもF8光束に対応できる事になりませんか
その論で行けば、両端の縦一列もクロスでF8対応になってないと
事のつじつまが合わないですよね
個人的には
視野絞りや視野レンズを考慮に入れて考察してみてはどうかと思いますが・・・
二次結像レンズが見ているのは撮影用レンズではなく
視野絞りを通した視野レンズの像です
書込番号:20088093
![]() 0点
0点
>アハト・アハトさん
コメントありがとうございます。
いろいろと勉強になります。
>その論で行けば、両端の縦一列もクロスでF8対応になってないと
>事のつじつまが合わないですよね
両端の横ラインはF4センサーですが、これはF5.6/F8センサーとは別のセパレータレンズを使っているのだと思います。なので両端ではクロス測距ができないのだと思います。
>二次結像レンズが見ているのは撮影用レンズではなく
>視野絞りを通した視野レンズの像です
カメラのレンズは収差を無視すれば虫メガネのような単レンズでも成り立つので、私の図だと絞りにあたるのがレンズの直径ということになります。
なので二次結像レンズが見ているのは絞り?を通した撮影用レンズの光束(の一部)でいいのではと思います。
(そもそもカメラレンズにあるのは開口絞り(Aperture stop)であって視野絞り(Field stop)では無いと思うのですが・・・)
書込番号:20088264
![]() 0点
0点
思いっきり話の降り出しの部分なのですが
>アナスチグマートさん
>位相差AFの位相差って何を指しているのでしょうか?位相の差ということなのでしょうが、その位相というのが分かりません。
ニコンの
企業情報 > 技術・研究開発 > 研究開発者インタビュー > 時代を拓いた研究開発者 > フェロー 歌川健 "どこにもないものを創造する喜び"
http://www.nikon.co.jp/profile/technology/researcher/fellow/utagawa/index2.htm
によると、
|当時私が研究していたフーリエ変換の位相定理を取り入れた素子を使うと、
|ズレの大きさと方向が比較的容易に検出できたのです。その研究成果がF3AFに生かされました。
|それが、現在でも主流となっている、瞳分割(ひとみぶんかつ)再結像光学系*3を用いた位相差検出方式*4です。
複雑な信号をフーリエ変換することで、いくつかの周波数、振幅、位相の異なる正弦波の組み合わせに分解できます。
視差の出るように2つに振り分けたセンサー信号にそれぞれフーリエ変換をかければ、
それぞれの信号を構成する正弦波の周波数、振幅、位相がわかりますので、
同一正弦波のセンサー位相の差を求めて、それを解消するようにレンズを駆動すると理解しました。
書込番号:20088484
![]() 0点
0点
koothさん、ナスチグマートさん
koothさんがコメントなさっている内容は、ご覧頂いているかもしれませんが、既に以下で軽く触れています。
http://bbs.kakaku.com/bbs/-/SortID=20056837/#20083619
******************************************************************************
とても参考になる資料を見付けました。1989年にキヤノンの方がお書きになられた解説です。日本光学会機関誌への寄稿なので、素人相手のような分かり易く簡略化された内容ではなく、実際に使用されている技術内容が記載されています。是非、お読みになって下さい。
・一眼レフカメラのオートフォーカス技術 / 鈴木謙二氏
https://annex.jsap.or.jp/photonics/kogaku/public/18-11-kaisetsu2.pdf
以下に私が気付いた点を列挙します。理解不足等による間違い/誤解等が多々あると思いますが、ご容赦頂ければ、幸いです。
(途中略)
私が唸った記述の一つが以下です。これほど明確かつ簡明な、位相差AFとコントラストAFの概念説明を今まで読んだ事が、私はありませんでした。「位相差方式とはまさに光学像の空間周波数成分の位相情報(シフト情報)を本質的には検知しており,比較的低い空間周波数に着目している. この点は高周波成分の増減を見るコントラスト検知方式とは基本的に異なるところである.」
次で引用されているのはニコンの特許ですが、フーリエ変換がなされているので、まさに周波数(位相)ですね。「実際図3の系において, イメージセンサーの出力を特定の空間周波数成分でフーリエ変換し,その位相差を用いて合焦制御するカメラも商品化されている.」
******************************************************************************
その時、ニコンの技術に対し考えた想像は、2つのラインセンサーの出力をそれぞれフーリエ変換し、差分を取れば、位相差、すなわち、デフォーカス量が求められると言う事です。以下の資料の(ページ数の記載がありませんが)4ページ目の「時間推移−位相スペクトル」にある式を変形すると、
Arg{F(ω)*exp(-jωa)}=Arg{F(ω)}−ωa → ωa=Arg{F(ω)}−Arg{F(ω)*exp(-jωa)}
となります。F(ω)はωの関数ですが、上記資料では「特定の空間周波数成分」と記載されているので、ωは定数だと思われます(勿論、周波数=ω/(2π))。従ってF(ω)とF(ω)*exp(-jωa)は関数ではなく一定値となり、差分ωaから位相差aが求められます。多分、多分ですよ!!、ωはラインセンサーの画素ピッチと比例関係?にあると思われますので、差分ωaから距離(と言うより、距離の対数)のシフト(=デフォーカス量)が求められます。
思いっ切り、間違っているかもしれないので、あまり信じないで下さいね!
・フーリエ変換の性質1
https://www.yonago-k.ac.jp/denki/lab/nitta/lecture/E5_signal/note/note10.pdf
アナスチグマートさん、アハト・アハトさん
現在進行中のテーマに関しては、お二人の議論も見ながら、思案中です。方向性はハッキリしたので、後は考えるだけなのですが‥。明朝までに、何らかのコメントが出来たらいいな、と思っています。申し訳ありません。
書込番号:20088899
![]() 1点
1点
>ミスター・スコップさん
触れられている部分はもちろん読んでいます。
スレ主さんの「位相差AFの位相差って何を指しているのでしょうか?」の説明として、
カメラを実際に開発した方が分かりやすく説明しているメーカー公式ページがあったので、
これのリンクをここに貼ったほうが、後で同様の疑問を持った人が見たときに役立つかなと思った次第。
書込番号:20089009
![]() 1点
1点
koothさん
> 触れられている部分はもちろん読んでいます。
>
> これのリンクをここに貼ったほうが、後で同様の疑問を持った人が見たときに役立つかなと思った次第。
ご親切に、どうもありがとうございました。
書込番号:20089032
![]() 0点
0点
>そもそもカメラレンズにあるのは開口絞り(Aperture stop)であって視野絞り(Field stop)では無いと思うのですが・・・
視野絞りといういいい方がまずかったですかね
ええと
視野レンズの後とセパレータレンズの間に視野マスクがあるのはご存じですよね
マスクは絞りの役割も兼ねているので、視野絞りと表現してしまいました
あまり長々と文章を書くのも読むのも好きではないので勝手に短縮しました
ここまで議論されているので語呂でわかるかと思ったのですが、すみませんでした
それでは次からは「視野マスク」と表現します(実際には絞り機能もあります)
光束はこの視野マスクで分離される、というか制限されます
F2.8対応センサにはF2.8相当の絞り径(形状はセンサ形状によるので円ではありません)
F5.6対応センサにはF5.6相当、というようになっています
でセパレータレンズはこの視野マスクの穴ごとに配置されていますて、その役割は
対極になる光束を分離するだけであって、特定の光束だけ取り出すものではないです
センサが右左で配置なら、左のセンサにはレンズの右側から来た光だけ
右のセンサには左を通った光だけを通すようになっています
件の1Dx2の左右のグループ(20点)であれば
視野マスクの穴は
縦ラインセンサのF5.6相当の絞り穴×上下の2個
横ラインセンサのF4相当の絞り穴×左右の2個
計四つ、セパレータレンズも4つになるかと思います
私の勝手な想像で、実際にはもっとハイテクかと思いますが・・・
>両端の横ラインはF4センサーですが、これはF5.6/F8センサーとは別のセパレータレンズを
>使っているのだと思います。なので両端ではクロス測距ができないのだと思います。
別のセパレータレンズを使ってるという意味では
縦ラインセンサも上下のグループで別のセパレータレンズを用いますよ
言いたいのは
アナスチグマートさんの説明であれば、例えばF2.8対応センサであれば
振れ幅が小さいと言うだけで、F2.8もF4もF5.6もF8も同中心にして対称に動くという事ですよね?
であれば全点F8対応になってしかるべきでしょう、という意味です
書込番号:20089581
![]() 1点
1点
すみません
今頃気づきましたが
書込番号[20085603]の私のイラスト
F8対応の説明というよりは、F5.6対応なのにF8のレンズでも動く理屈の説明ですね
訂正します
書込番号:20089605
![]() 0点
0点
>アハト・アハトさん
詳しいご説明ありがとうございます。私も詳しいわけではないので(なのでここで質問になっているのですが)助かります。
>振れ幅が小さいと言うだけで、F2.8もF4もF5.6もF8も同中心にして対称に動くという事ですよね?
基本的にはそういう認識でいます。ただし、F2.8、およびF4はそれぞれ独立したセパレータレンズ(もしくは視野マスク)を持っていて、F5.6以下の光束はケラれて測距ができない、と考えています。
(あまり自信ありません)
元々この議論の発端はF5.6センサーでF8測距ができるか?という点だったと思います。
普通に考えればF5.6センサーではF8光束はケラれて測距はできない(他のカメラはそうなっている)と思うのですが、キヤノンはF8専用のセンサーを持っているわけではなさそうなので、私が考えた光路図のようになっているのかなと思った次第です。
(つまり他のカメラより拾える光束の範囲が広い)
書込番号:20089809
![]() 0点
0点
 |
|---|
視野マスク、セパレータレンズ、ラインセンサの関係はこんな感じになると思います
グレーが視野マスク
穴が絞り(制限する光束で大きさが違う)
水色がセパレータレンズ
緑がセンサ
このあたりの認識は一緒ですかね?
書込番号:20089947
![]() 1点
1点
 |
|---|
1DXのセパレータレンズ |
>アハト・アハトさん
私もこんなイメージです。
ただセパレータレンズの構造はこのようになっているかは分かりません。
(添付の1DXのセパレータレンズを見ると、構造はもっと単純に見える)
書込番号:20089989
![]() 0点
0点
その写真の事であれば
それは視野レンズですよ
1Dxは測距点が大きく3グループにわかれますよね
メインミラーの裏側に写る全体像の、それぞれのグループに応じた場所を
3つのレンズで見ています
それぞれのグループごとに視野マスクがあって、マスクの絞りに応じてセパレータレンズがあります
書込番号:20090069
![]() 1点
1点
>アハト・アハトさん
なるほど、勘違いをしていました。
ご解説ありがとうございました。
書込番号:20090079
![]() 0点
0点
>ミスター・スコップさん
すっかり時間が経ってしまいましたが・・・
>方向性はハッキリしたので、後は考えるだけなのですが‥。明朝までに、何らかのコメントが出来たらいいな、と思っています。
何かコメントできそうでしょうか?ご意見ぜひお聞きしたいです。
書込番号:20103019
![]() 1点
1点
アナスチグマートさん、アハト・アハトさん
お二人が私の素朴な疑問に対し、ご興味を持って下さり、様々なコメント/議論を活発にして下さっているのに、私の書き込みが遅れており、大変申し訳ありません。
> 現在進行中のテーマに関しては、お二人の議論も見ながら、思案中です。方向性はハッキリしたので、後は考えるだけなのですが‥。明朝までに、何らかのコメントが出来たらいいな、と思っています。申し訳ありません
と偉そうに書いたのに、体調を崩したり、集中力がプッツンしてしまったりしたので、他のスレへの簡単なコメント程度なら出来るものの、ここでの現在進行中のテーマに取り組む為に、不可欠の体力、気力とも萎えてしまっているのが現状です。前述の通り、糸口はしっかりと見えている(と個人的には感じている)ので、あとは根性あるのみなのですが‥。
本当に申し訳ありません。今暫く、お時間を頂ければ幸いです。
書込番号:20103289
![]() 0点
0点

このスレッドに書き込まれているキーワード
「レンズ」の新着クチコミ
| 内容・タイトル | 返信数 | 最終投稿日時 |
|---|---|---|
| 0 | 2025/11/11 2:54:26 | |
| 0 | 2025/11/10 15:43:59 | |
| 1 | 2025/11/10 15:55:11 | |
| 4 | 2025/11/10 8:44:47 | |
| 2 | 2025/11/10 15:47:39 | |
| 2 | 2025/11/10 7:51:16 | |
| 13 | 2025/11/10 16:27:55 | |
| 2 | 2025/11/10 10:09:29 | |
| 0 | 2025/11/09 15:36:00 | |
| 1 | 2025/11/09 18:39:20 |

クチコミ掲示板検索
新着ピックアップリスト
-
【欲しいものリスト】やっさんのぱそこん
-
【欲しいものリスト】PC構成20251031
-
【欲しいものリスト】メインPC再構成
-
【Myコレクション】自作構成
-
【欲しいものリスト】pcケース
価格.comマガジン
注目トピックス



(カメラ)
レンズ
(最近10年以内の発売・登録)




